
P2Poverview
... More robust to node failure (we can find our new successor if the old one failed) If a finger does not respond, take the previous finger, or the replicas, if close enough ...
... More robust to node failure (we can find our new successor if the old one failed) If a finger does not respond, take the previous finger, or the replicas, if close enough ...

Survey of Active network
... — Bell communication research several aspects of the Penn design will be studied jointly with Bell core ...
... — Bell communication research several aspects of the Penn design will be studied jointly with Bell core ...

... A Mobile Adhoc Network (MANET) is one that nodes come collectively as needed, not essentially with any sustain from the active Internet infrastructure or any other kind of permanent stations. We can say that an ad hoc network is an autonomous system of mobile hosts connected by wireless links. The c ...

Tcp/ip
... • Provides synchronisation of devices so that the receiving device can manage the flow of data being received • Identifies what network topology is being used and controls the physical signals that transmit the strings of bits around the network • Controls physical characteristics such as data trans ...
... • Provides synchronisation of devices so that the receiving device can manage the flow of data being received • Identifies what network topology is being used and controls the physical signals that transmit the strings of bits around the network • Controls physical characteristics such as data trans ...


Networking and the Internet - Department of Mathematics and
... – All other stations also hear the CTS, and have to withhold sending until transmission is complete ...
... – All other stations also hear the CTS, and have to withhold sending until transmission is complete ...


PPT
... we learned how to do this already (chapter 3)! seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? CPSC 441: Link Layer ...
... we learned how to do this already (chapter 3)! seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? CPSC 441: Link Layer ...

PPT - University of Cincinnati
... - When a node wishes to join a network, it contact the helper node - When a node wishes to advertise a file, it should consult the helper node for finding existing aggregation point of that type - If the aggregation point is not found, the advertising node can become aggregation point ...
... - When a node wishes to join a network, it contact the helper node - When a node wishes to advertise a file, it should consult the helper node for finding existing aggregation point of that type - If the aggregation point is not found, the advertising node can become aggregation point ...

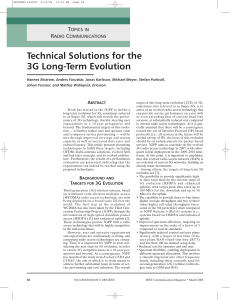
Technical Solutions for the 3G Long
... this case, segmentation is required in the Node B. However, instead of segmenting an RLC PDU into multiple pieces,1 it is proposed to first encode the RLC PDU into forward error correction (FEC) blocks and then use rate matching to form FEC fragments, which fit into the available radio resources. If ...
... this case, segmentation is required in the Node B. However, instead of segmenting an RLC PDU into multiple pieces,1 it is proposed to first encode the RLC PDU into forward error correction (FEC) blocks and then use rate matching to form FEC fragments, which fit into the available radio resources. If ...


Solutions to Finals
... quantizing) introduce some noise, once digitized, if the digital signals are received and regenerated before noise makes this impossible, there is no additional noise introduced in the transmission of the digital signals. c. How does a repeater extend the length of a LAN? Solution: A repeater receiv ...
... quantizing) introduce some noise, once digitized, if the digital signals are received and regenerated before noise makes this impossible, there is no additional noise introduced in the transmission of the digital signals. c. How does a repeater extend the length of a LAN? Solution: A repeater receiv ...

CMPT 371: Chapter 1 - Simon Fraser University
... transport protocols run in end systems send side: breaks app messages into segments, passes to network layer rcv side: reassembles segments into messages, passes to app layer more than one transport protocol available to apps Internet: TCP and UDP ...
... transport protocols run in end systems send side: breaks app messages into segments, passes to network layer rcv side: reassembles segments into messages, passes to app layer more than one transport protocol available to apps Internet: TCP and UDP ...



Link Layer: CPSC 441
... we learned how to do this already (chapter 3)! seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? CPSC 441: Link Layer ...
... we learned how to do this already (chapter 3)! seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? CPSC 441: Link Layer ...


Slides
... focus on trade-offs between the amount of communication in the network and tracking accuracy. ...
... focus on trade-offs between the amount of communication in the network and tracking accuracy. ...
NICs
... Uploading data: – NIC reads data (bits) from the system bus (parallel) – NIC packages data into frames along with error check codes and address. – NIC ships frames out onto the network medium (serial) • Downloading data: – NIC reads frames from network medium and checks address (serial) – NIC unpack ...
... Uploading data: – NIC reads data (bits) from the system bus (parallel) – NIC packages data into frames along with error check codes and address. – NIC ships frames out onto the network medium (serial) • Downloading data: – NIC reads frames from network medium and checks address (serial) – NIC unpack ...


Tutorial 3 Selected Answers Question 13
... optimistically unchoked by one of her neighbors, during which time she will receive chunks from that neighbor. Question 14: In bitTorrent, suppose Alice provides chunks to Bob throughout a 30second interval. Will Bob necessarily return the favour and provide chunks to Alice in this same interval? Wh ...
... optimistically unchoked by one of her neighbors, during which time she will receive chunks from that neighbor. Question 14: In bitTorrent, suppose Alice provides chunks to Bob throughout a 30second interval. Will Bob necessarily return the favour and provide chunks to Alice in this same interval? Wh ...

DoS Attacks On Wireless Voice Over IP Systems
... • Week form of protection which is not practical to implement. Hard to modify firmware of devices! • Contacted RoamAD (converged voice/data networks) how their commercial WiFi networks were protected. Very surprised to find that not many companies do much outside of the 802.11 spec. • as lack of int ...
... • Week form of protection which is not practical to implement. Hard to modify firmware of devices! • Contacted RoamAD (converged voice/data networks) how their commercial WiFi networks were protected. Very surprised to find that not many companies do much outside of the 802.11 spec. • as lack of int ...

2013-08 Robust network topologies for replication in CEDA
... the right of node 0. This gives nodes 1,2,3 shown in red. Then we move into the grandparent of node 0 (i.e. node 4) and perform another depth first traversal, this time avoiding traversal into the parent of node 0 or into any of its siblings to its right. This gives nodes 4,5,6,7,8 coloured green. T ...
... the right of node 0. This gives nodes 1,2,3 shown in red. Then we move into the grandparent of node 0 (i.e. node 4) and perform another depth first traversal, this time avoiding traversal into the parent of node 0 or into any of its siblings to its right. This gives nodes 4,5,6,7,8 coloured green. T ...
Fig. 12-1: Network topologies
... • There is no O/E conversion in between the transmitter and the receiver (one continuous light path) • Power budget and rise time calculations has to be done from end-to-end depending on which Tx/Rx pair communicates • Star, bus, ring, mesh, tree topologies • PON Access Networks are deployed widely ...
... • There is no O/E conversion in between the transmitter and the receiver (one continuous light path) • Power budget and rise time calculations has to be done from end-to-end depending on which Tx/Rx pair communicates • Star, bus, ring, mesh, tree topologies • PON Access Networks are deployed widely ...