
View PDF - Advances in Cognitive Systems
... robot to develop perceptual and motor skills to be capable of doing anything at all. So it should not be surprising that a great deal of research has been devoted to these areas. With improving perceptual and motor skills, robots have been deployed in increasingly complex tasks. However, both hardwa ...
... robot to develop perceptual and motor skills to be capable of doing anything at all. So it should not be surprising that a great deal of research has been devoted to these areas. With improving perceptual and motor skills, robots have been deployed in increasingly complex tasks. However, both hardwa ...
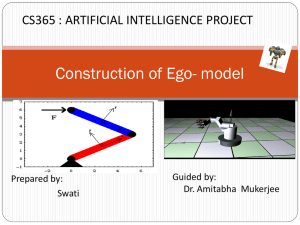
Slides - CSE IITK
... Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and Automation (ICRA 2006), Orlando, FL, May 2006 “Robot Navigation Usin ...
... Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and Automation (ICRA 2006), Orlando, FL, May 2006 “Robot Navigation Usin ...
Human Implications of Human-Robot Interaction AAAI Press Papers from the AAAI Workshop
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...
How to keep robot/AI under control?
... could cause some harm if robots were to act emotionally I still feel that empathy, compassion and other human emotions that stop most of us from acting in a certain negative way are key to help robots develop in a way that will not bring harm to us. Robots without such considerations will have the p ...
... could cause some harm if robots were to act emotionally I still feel that empathy, compassion and other human emotions that stop most of us from acting in a certain negative way are key to help robots develop in a way that will not bring harm to us. Robots without such considerations will have the p ...

How engineeRing caRRied out tHe PRoject
... great narrative successes of Asimov, well before becom- ...
... great narrative successes of Asimov, well before becom- ...
Addressing Sustainability via AI - Report from the 23rd International
... has been gaining momentum, against the backdrop that some weapons have been endowed with high-level intelligence, equipped with advanced AI programming and can decide on themselves during a battle whether or not to fire. Should we ban autonomous weapons? The answer might seem intuitively obvious, as ...
... has been gaining momentum, against the backdrop that some weapons have been endowed with high-level intelligence, equipped with advanced AI programming and can decide on themselves during a battle whether or not to fire. Should we ban autonomous weapons? The answer might seem intuitively obvious, as ...

Today, the usage of artificial intelligence in military
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...
... Elon Musk, CEO of Tesla which is an American automotive and energy storage company is at the same side as Bostrom. He, through his account Twitter has shown his concern towards this issue by urging the society to be extra careful with AI because it has the potential to be more perilous than nukes. R ...
The History of Artificial Intelligence
... ORDER ROSSUM'S ROBOTS" Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventu ...
... ORDER ROSSUM'S ROBOTS" Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventu ...

MIT mobile robots-what`s next? - Cooperative Robotics Research
... Over the past two years, we have made a number of observations about moet mobile robots and have noted some problems. First, the state of the art in terms of the level of intelligence attainable is not very high. Second, a considerable portion of the sheer bulk on most mobile robots has nothing a t ...
... Over the past two years, we have made a number of observations about moet mobile robots and have noted some problems. First, the state of the art in terms of the level of intelligence attainable is not very high. Second, a considerable portion of the sheer bulk on most mobile robots has nothing a t ...
Introduction autonomous mobile systems and AI planning
... – slow, speed decreases with complexity – thinking too long may be dangerous – requires (a lot of) accurate information ...
... – slow, speed decreases with complexity – thinking too long may be dangerous – requires (a lot of) accurate information ...
How Robots Work
... An industrial robot with six joints closely resembles a human arm - it has the equivalent of a shoulder, an elbow and a wrist. Typically, the shoulder is mounted to a stationary base structure rather than to a movable body. This type of robot has six degrees of freedom, meaning it can pivot in six d ...
... An industrial robot with six joints closely resembles a human arm - it has the equivalent of a shoulder, an elbow and a wrist. Typically, the shoulder is mounted to a stationary base structure rather than to a movable body. This type of robot has six degrees of freedom, meaning it can pivot in six d ...
CptS: Introduction to Robotics
... Designing a Robotics Architecture • What data is necessary to do the tasks? • How will the robot obtain that data from the environment or from the users? • What sensors will produce the data? • What representations will be used for the data? • What processes will abstract the sensory data into repr ...
... Designing a Robotics Architecture • What data is necessary to do the tasks? • How will the robot obtain that data from the environment or from the users? • What sensors will produce the data? • What representations will be used for the data? • What processes will abstract the sensory data into repr ...

PDF
... action parameter space to form behavior primitives, and explore the environment with these primitives to learn basic object affordances such as graspability, pushability and rollability. After learning, the robot can emulate observed goals by making multi-step plans using the discovered behaviors an ...
... action parameter space to form behavior primitives, and explore the environment with these primitives to learn basic object affordances such as graspability, pushability and rollability. After learning, the robot can emulate observed goals by making multi-step plans using the discovered behaviors an ...
Artificial Inelegance and Robotics
... Where they are to day Where they may go in the future ...
... Where they are to day Where they may go in the future ...
Robotics? - OpenHouse @ DEIB
... Studying AI and Robotics … … gives you, in any case, all the basics of computer engineering, so it does not prevent your future work in the “traditional” computer engineering areas … makes you a specialist in techniques pervading all kind of applications, and are (and will be more and more) present ...
... Studying AI and Robotics … … gives you, in any case, all the basics of computer engineering, so it does not prevent your future work in the “traditional” computer engineering areas … makes you a specialist in techniques pervading all kind of applications, and are (and will be more and more) present ...

Developing Effective Robot Teammates for Human
... workspace with a robot (Figure 1). The central contribution of this research is a means of learning different types of assistive behaviors and the contexts in which to apply them (Hayes and Scassellati 2014b). Learned behaviors take the form of DMPs, which can range from simple materials stabilizati ...
... workspace with a robot (Figure 1). The central contribution of this research is a means of learning different types of assistive behaviors and the contexts in which to apply them (Hayes and Scassellati 2014b). Learned behaviors take the form of DMPs, which can range from simple materials stabilizati ...
File - Operating In The Robotic Matrix
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
Artificial Intelligence
... The objective of speech recognition software is to allow the user to communicate with the computer by talking to it. However, before using the system you must first go through a training process; not for you, for the computer! ...
... The objective of speech recognition software is to allow the user to communicate with the computer by talking to it. However, before using the system you must first go through a training process; not for you, for the computer! ...
Introduction - Computer Science & Engineering
... • Most real-world robots today do perform such “obligatory work” in highly controlled environments – Factory automation (car assembly) ...
... • Most real-world robots today do perform such “obligatory work” in highly controlled environments – Factory automation (car assembly) ...

to get the file - Mechanical and Materials Engineering
... content? It is in the controller just as the intelligence of a human is in the neural connections of the brain. However, it is only possible to see this intelligence through some action just as it would not be possible to see intelligence in a comatose human. Where does the intelligence come from? T ...
... content? It is in the controller just as the intelligence of a human is in the neural connections of the brain. However, it is only possible to see this intelligence through some action just as it would not be possible to see intelligence in a comatose human. Where does the intelligence come from? T ...

Intelligent Agents Intelligent agents Intelligent agents
... Autonomous Unmanned Aerial Vehicle - Linköping ...
... Autonomous Unmanned Aerial Vehicle - Linköping ...

Building a multimodal human-robot interface
... Whenever the system obtains a grammatical utterance, the appropriateness/need filter checks the resulting representation against any perceived gesture. The filter checks the appropriateness of various gestures with the perceived utterance and filters out redundant gestures. If a gesture is not neede ...
... Whenever the system obtains a grammatical utterance, the appropriateness/need filter checks the resulting representation against any perceived gesture. The filter checks the appropriateness of various gestures with the perceived utterance and filters out redundant gestures. If a gesture is not neede ...

Developing Effective Robot Teammates for Human
... workspace with a robot (Figure 1). The central contribution of this research is a means of learning different types of assistive behaviors and the contexts in which to apply them (Hayes and Scassellati 2014b). Learned behaviors take the form of DMPs, which can range from simple materials stabilizati ...
... workspace with a robot (Figure 1). The central contribution of this research is a means of learning different types of assistive behaviors and the contexts in which to apply them (Hayes and Scassellati 2014b). Learned behaviors take the form of DMPs, which can range from simple materials stabilizati ...

Dance Choreography Design of Humanoid Robots using Interactive
... various sounds and also to generate sounds from motions using the back-propagation through-time algorithm. Other approach from Tokyo University is using Chaos to trade synchronization and autonomy in a dancing robot. Dancing Robot Partner built at the Tohoku University is well-known in the domain of ...
... various sounds and also to generate sounds from motions using the back-propagation through-time algorithm. Other approach from Tokyo University is using Chaos to trade synchronization and autonomy in a dancing robot. Dancing Robot Partner built at the Tohoku University is well-known in the domain of ...
Term Project Color and Illumination Independent Landmark
... • Image labeling process that has been used in color segmentation-based approach is replaced with region labeling in which the landmarks and their immediate surrounding are covered – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to ...
... • Image labeling process that has been used in color segmentation-based approach is replaced with region labeling in which the landmarks and their immediate surrounding are covered – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to ...
Robot

A robot is a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry. Robots can be autonomous or semi-autonomous and range from humanoids such as Honda's Advanced Step in Innovative Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) to industrial robots, medical operating robots, patent assist robots, dog therapy robots, collectively programmed swarm robots, UAV drones such as General Atomics MQ-1 Predator, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own.The branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.From the time of ancient civilization there have been many accounts of user-configurable automated devices and even automata resembling animals and humans, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.The word 'robot' was first used to denote a fictional humanoid in a 1921 play R.U.R. by the Czech writer, Karel Čapek. Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948. The first digital and programmable robot was invented by George Devol in 1954 and was named the Unimate. It was sold to General Motors in 1961 where it was used to lift pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.Robots have replaced humans in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea.There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising unemployment as they replace workers in increasing numbers of functions. The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.