
Externalizing Internal State *
... the first to formalize the modification of an environment that externalizes the internal states. Since some reactive robots exhibited problems like deadlocks and myopic functionality, hybrid architectures with modules like planners began to be explored. In this transition, the potential of reactivit ...
... the first to formalize the modification of an environment that externalizes the internal states. Since some reactive robots exhibited problems like deadlocks and myopic functionality, hybrid architectures with modules like planners began to be explored. In this transition, the potential of reactivit ...

A Developmental Approach to Intelligence
... At the onset of the trip, almost 50 years ago when the field of artificial intelligence (AI) was being created, researchers imagined that it would be a Sunday afternoon drive. Just two years into the trip, Herbert Simon and Allen Newell wrote: It is not my aim to surprise or shock you... [b]ut the s ...
... At the onset of the trip, almost 50 years ago when the field of artificial intelligence (AI) was being created, researchers imagined that it would be a Sunday afternoon drive. Just two years into the trip, Herbert Simon and Allen Newell wrote: It is not my aim to surprise or shock you... [b]ut the s ...
Adoption of Artificial Intelligence in Agriculture
... (greenhouses, pig and bird shelters), where integrated expert systems with a high degree of independence in making operational decisions are already commercially available, the expert systems are generally still disconnected from background and from previous experience when delivering solutions and ...
... (greenhouses, pig and bird shelters), where integrated expert systems with a high degree of independence in making operational decisions are already commercially available, the expert systems are generally still disconnected from background and from previous experience when delivering solutions and ...

Artificial Neural Networks For Spatial Perception
... methods. A coordinated approach to motor planning, control, estimation, prediction and learning is needed. Spatial perception, that is the detection and localisation of objects in the scene, has recently been of increased interest in robotics. This localisation is needed for on-line motion planning, ...
... methods. A coordinated approach to motor planning, control, estimation, prediction and learning is needed. Spatial perception, that is the detection and localisation of objects in the scene, has recently been of increased interest in robotics. This localisation is needed for on-line motion planning, ...

Form, function and the matter of experience
... Throughout the history of Artificial Intelligence (AI)1, proud programmers that created a program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the headi ...
... Throughout the history of Artificial Intelligence (AI)1, proud programmers that created a program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the headi ...

Social Robots: Approaches and Conceptions in the Perspective of
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
Brief History of Artificial Intelligence - OCW
... TOPICS booth at AAAI-02 in Edmonton, Canada (August 2002) ...
... TOPICS booth at AAAI-02 in Edmonton, Canada (August 2002) ...

Robot soccer competitions. Learn about 2002 year class project. In
... Do you really believe that a team of Robots could beat the FIFA World Cup champions by ...
... Do you really believe that a team of Robots could beat the FIFA World Cup champions by ...

WORD - Semiosis Evolution Energy
... Searle 1980; Harnad 1990; Sharkey & Jackson 1994; Bickhard 1998; Ziemke 1999). This is due to the fact that the controller network can actually, by means of the robot body (sensors and effectors), interact with the physical objects in its environment, independent of an observer’s interpretation or m ...
... Searle 1980; Harnad 1990; Sharkey & Jackson 1994; Bickhard 1998; Ziemke 1999). This is due to the fact that the controller network can actually, by means of the robot body (sensors and effectors), interact with the physical objects in its environment, independent of an observer’s interpretation or m ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... the path hence the robot must avoid these obstacles and plans a new path to achieve the task of navigation. The robot has to find a collision-free trajectory between the starting configuration and the goal configuration in a static or dynamic environment containing some obstacles. Moreover, when a r ...
... the path hence the robot must avoid these obstacles and plans a new path to achieve the task of navigation. The robot has to find a collision-free trajectory between the starting configuration and the goal configuration in a static or dynamic environment containing some obstacles. Moreover, when a r ...

Artificial Intelligence Artificial Intelligence Running head
... building of Wabot-1. Wabot-1 is a robot that could walk a few steps and pick up simple objects with its two hands and carry out some speech interaction. However, Wabot-1 is still a mechanism. Wabot-2 was built in 1984. Wabot-2 could not stand but sat at a piano bench and would play an organ. In the ...
... building of Wabot-1. Wabot-1 is a robot that could walk a few steps and pick up simple objects with its two hands and carry out some speech interaction. However, Wabot-1 is still a mechanism. Wabot-2 was built in 1984. Wabot-2 could not stand but sat at a piano bench and would play an organ. In the ...
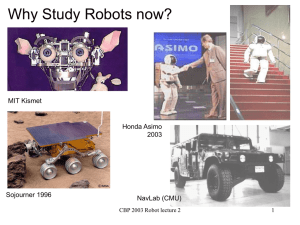
Comp 1017 Robots
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
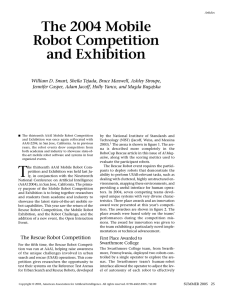
The 2004 Mobile Robot Competition and Exhibition
... interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interacting with the system, with 92 percent of users reporting that they enjoyed their experience, ...
... interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interacting with the system, with 92 percent of users reporting that they enjoyed their experience, ...

A framework for making sophisticated robotics accessible
... sensors used. Some sensors provide specific range information, like distance to an obstacle in meters or millimeters. Others simply provide a numeric value where larger values correspond to open space and smaller values imply nearby obstacles. In our abstractions, in addition to the default units pr ...
... sensors used. Some sensors provide specific range information, like distance to an obstacle in meters or millimeters. Others simply provide a numeric value where larger values correspond to open space and smaller values imply nearby obstacles. In our abstractions, in addition to the default units pr ...

Applying a natural intelligence pattern in cognitive robots
... in many aspects, by different branches of science. In other hand, one of the biggest concerns of the future generation of Artificial Intelligence (AI) is to build robots who can think like human. To achieve this AI engineers used the theories inspired by human intelligent, which were suggested by we ...
... in many aspects, by different branches of science. In other hand, one of the biggest concerns of the future generation of Artificial Intelligence (AI) is to build robots who can think like human. To achieve this AI engineers used the theories inspired by human intelligent, which were suggested by we ...
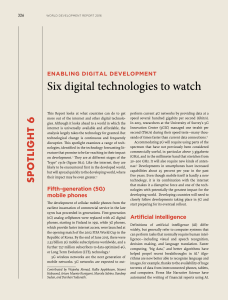
Six digital technologies to watch
... estimates that by 2020, 50 billion devices and objects will be connected to the internet. IoT is quickly redefining service delivery and unlocking opportunities in multiple areas. Smart fitness sensors and trackers are transforming health care and improving personal fitness and health. Embedded sens ...
... estimates that by 2020, 50 billion devices and objects will be connected to the internet. IoT is quickly redefining service delivery and unlocking opportunities in multiple areas. Smart fitness sensors and trackers are transforming health care and improving personal fitness and health. Embedded sens ...
Ryan Whitehead Bot Talk In my project, “Bot Talk” we see the
... In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can hold a simp ...
... In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can hold a simp ...

Vorlesung Grundlagen der Künstlichen Intelligenz
... Joel Moses (PhD work at MIT) demonstrated the power of symbolic reasoning for integration problems in the Macsyma program. First successful knowledge-based program in mathematics. Richard Greenblatt at MIT built a knowledge-based chess-playing program, MacHack, that was good enough to achieve a clas ...
... Joel Moses (PhD work at MIT) demonstrated the power of symbolic reasoning for integration problems in the Macsyma program. First successful knowledge-based program in mathematics. Richard Greenblatt at MIT built a knowledge-based chess-playing program, MacHack, that was good enough to achieve a clas ...
25-Concepts - My FIT (my.fit.edu)
... • Manufacturing and material handling – not autonomous: manufacturing, handling – simple machines are the best solution • need accuracy, power, shapes put in standard cradles ...
... • Manufacturing and material handling – not autonomous: manufacturing, handling – simple machines are the best solution • need accuracy, power, shapes put in standard cradles ...

the first of a series of anthropomimetic musculoskeletal upper torsos
... the large amounts of inertia produced. Although advances in robot control have shown that it is possible to build safer robots using standard actuation methods with computationally controlled compliance, this has the weakness that it is not intrinsic to the robots body. Probably the best known conve ...
... the large amounts of inertia produced. Although advances in robot control have shown that it is possible to build safer robots using standard actuation methods with computationally controlled compliance, this has the weakness that it is not intrinsic to the robots body. Probably the best known conve ...

From Solitary to Collective Behaviours: Decision Making and
... are placed. Moreover, being in a collective scenario, the actions of each s-bot can influence—and are influenced themselves—by the status of the other s-bots, which try to make their own decisions at the same time. This opens the way to cooperative solutions that can exploit not only the dynamical i ...
... are placed. Moreover, being in a collective scenario, the actions of each s-bot can influence—and are influenced themselves—by the status of the other s-bots, which try to make their own decisions at the same time. This opens the way to cooperative solutions that can exploit not only the dynamical i ...

Neural Robot Detection in RoboCup
... individual subwindows, the less problematic are ROIs that do not match a robot exactly (in size or in position), but on the other hand, the result is getting less specific. The number of subwindows in both directions controls how exact the shape representation will be. This is again a decision betwe ...
... individual subwindows, the less problematic are ROIs that do not match a robot exactly (in size or in position), but on the other hand, the result is getting less specific. The number of subwindows in both directions controls how exact the shape representation will be. This is again a decision betwe ...

Real Robots that Pass Human Tests of Self-Consciousness
... perceptual processes that fuse the relevant sensory input to produce the perception that an utterance has been made. R3 then concludes2 that the utterance just perceived was made by either R3 or some agent that very convincingly sounds like R3 . In short: R3 perceives that he heard himself say “I do ...
... perceptual processes that fuse the relevant sensory input to produce the perception that an utterance has been made. R3 then concludes2 that the utterance just perceived was made by either R3 or some agent that very convincingly sounds like R3 . In short: R3 perceives that he heard himself say “I do ...
Alex Cormier - Chief Delphi
... dangerously injured. Possibly those same robots could be building our houses for us with out one single mistake or failure. It is not very hard notice once you walk through a well developed mall that you notice at least one video game store. The video game industry is a vast array of Artificial Inte ...
... dangerously injured. Possibly those same robots could be building our houses for us with out one single mistake or failure. It is not very hard notice once you walk through a well developed mall that you notice at least one video game store. The video game industry is a vast array of Artificial Inte ...
Robot

A robot is a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry. Robots can be autonomous or semi-autonomous and range from humanoids such as Honda's Advanced Step in Innovative Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) to industrial robots, medical operating robots, patent assist robots, dog therapy robots, collectively programmed swarm robots, UAV drones such as General Atomics MQ-1 Predator, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own.The branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.From the time of ancient civilization there have been many accounts of user-configurable automated devices and even automata resembling animals and humans, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.The word 'robot' was first used to denote a fictional humanoid in a 1921 play R.U.R. by the Czech writer, Karel Čapek. Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948. The first digital and programmable robot was invented by George Devol in 1954 and was named the Unimate. It was sold to General Motors in 1961 where it was used to lift pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.Robots have replaced humans in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea.There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising unemployment as they replace workers in increasing numbers of functions. The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.