Robotics - Krupa Vara Prasad Adimulapu
... In 1927 the Maschinenmensch ("machine-human") gynoid humanoid robot (also called "Parody", "Futura", "Robotrix", or the "Maria impersonator") was the first depiction of a robot ever to appear on film was played by German actress Brigitte Helm in Fritz Lang's film Metropolis. In 1942 the science fict ...
... In 1927 the Maschinenmensch ("machine-human") gynoid humanoid robot (also called "Parody", "Futura", "Robotrix", or the "Maria impersonator") was the first depiction of a robot ever to appear on film was played by German actress Brigitte Helm in Fritz Lang's film Metropolis. In 1942 the science fict ...

PDF file
... Traditional research paradigms in machine learning have been fruitfully informed by models of human learning. However, existing behavior-based learning techniques typically applied to robot learning (e.g., [10]) differ fundamentally from human mental development. Such differences are still not widel ...
... Traditional research paradigms in machine learning have been fruitfully informed by models of human learning. However, existing behavior-based learning techniques typically applied to robot learning (e.g., [10]) differ fundamentally from human mental development. Such differences are still not widel ...
Lego Mindstorms NXT 2.0 - hanan-salah
... What is the definition of Artificial Intelligence? Artificial intelligence (AI) is an area of computer science that emphasizes the creation of intelligent machines that work and react like humans. Some of the activities computers with artificial intelligence are designed for include speech recogniti ...
... What is the definition of Artificial Intelligence? Artificial intelligence (AI) is an area of computer science that emphasizes the creation of intelligent machines that work and react like humans. Some of the activities computers with artificial intelligence are designed for include speech recogniti ...
Fortnightly Thoughts
... the Disclosure Appendix, or go to www.gs.com/research/hedge.html. Analysts employed by non-US affiliates are not registered/qualified as research analysts with FINRA in the U.S. The Goldman Sachs Group, Inc. ...
... the Disclosure Appendix, or go to www.gs.com/research/hedge.html. Analysts employed by non-US affiliates are not registered/qualified as research analysts with FINRA in the U.S. The Goldman Sachs Group, Inc. ...
Document
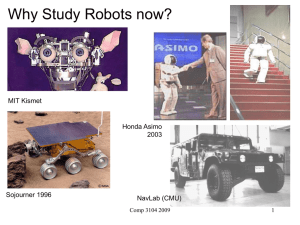
... Why learn to program with Robots ? 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers 3. Fundamental aspects : 1. Good vehicle for teaching programming … 2. Important analogy of each living being … the Self 3. Important ana ...
... Why learn to program with Robots ? 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers 3. Fundamental aspects : 1. Good vehicle for teaching programming … 2. Important analogy of each living being … the Self 3. Important ana ...
Robotics
... Peter Thiel: “The most valuable businesses of coming decades will be built by entrepreneurs who seek to empower people rather than try to make them obsolete.” Koen Hindriks ...
... Peter Thiel: “The most valuable businesses of coming decades will be built by entrepreneurs who seek to empower people rather than try to make them obsolete.” Koen Hindriks ...

machine ethics and robot ethics
... Editors selected for each of the eight volumes are leaders within their respective fields. They were charged to provide a roadmap of core concerns with the help of an introductory essay and the careful selection of articles that have or will play an important role in ongoing debates. Many of these a ...
... Editors selected for each of the eight volumes are leaders within their respective fields. They were charged to provide a roadmap of core concerns with the help of an introductory essay and the careful selection of articles that have or will play an important role in ongoing debates. Many of these a ...

Behaviour as a Complex Adaptive System - laral
... complicated by the fact that, when interactions are nonlinear, small variations at the levels of the rules governing the interactions might translate to very different forms of behavior due to cumulative and amplifying effects. 1.2 On the advantages of self-organizing over design techniques From a t ...
... complicated by the fact that, when interactions are nonlinear, small variations at the levels of the rules governing the interactions might translate to very different forms of behavior due to cumulative and amplifying effects. 1.2 On the advantages of self-organizing over design techniques From a t ...

Cognitive Robotics - Knowledge
... robotic control to be central to cognitive robotics [75]. This connects cognitive robotics not only to (traditional, less cognitive) robotics but also, as discussed later, to other areas of AI such as planning and agent-oriented programming. To illustrate the knowledge representation and reasoning i ...
... robotic control to be central to cognitive robotics [75]. This connects cognitive robotics not only to (traditional, less cognitive) robotics but also, as discussed later, to other areas of AI such as planning and agent-oriented programming. To illustrate the knowledge representation and reasoning i ...

www.cs.ubc.ca
... the output can only depend on current inputs and previous inputs and outputs. This function will be represented as a logic program specifying how the output at any time is implied by current and previous inputs. The causality ensures that we have acyclic rules. 2. The logic programs are axiomatised ...
... the output can only depend on current inputs and previous inputs and outputs. This function will be represented as a logic program specifying how the output at any time is implied by current and previous inputs. The causality ensures that we have acyclic rules. 2. The logic programs are axiomatised ...

word office version - European Parliament
... liability of various actors concerning responsibility for the acts and omissions of robots where the cause cannot be traced back to a specific human actor and whether the acts or omissions of robots which have caused harm could have been avoided; AC. whereas, ultimately, the autonomy of robots raise ...
... liability of various actors concerning responsibility for the acts and omissions of robots where the cause cannot be traced back to a specific human actor and whether the acts or omissions of robots which have caused harm could have been avoided; AC. whereas, ultimately, the autonomy of robots raise ...

Robotic tool use and problem solving based on
... during development through sensorimotor experience: i.e. interacting with objects while perceiving salient events. An appealing concept to represent this sensorimotor knowledge has been proposed in psychology under the name of object affordances: action possibilities that an object offers to an agen ...
... during development through sensorimotor experience: i.e. interacting with objects while perceiving salient events. An appealing concept to represent this sensorimotor knowledge has been proposed in psychology under the name of object affordances: action possibilities that an object offers to an agen ...

Learning from Observations
... • Proponents of embodied AI believe that in order to reproduce human intelligence, w e need to retrace an evolutionary process: – We should begin by building robust systems that perform very simple tasks — but in the real w orld. – When w e’ve solved this problem, w e can progressively add new funct ...
... • Proponents of embodied AI believe that in order to reproduce human intelligence, w e need to retrace an evolutionary process: – We should begin by building robust systems that perform very simple tasks — but in the real w orld. – When w e’ve solved this problem, w e can progressively add new funct ...

Intelligence Without Reason
... though their importance was recognized by many early researchers- The early framework w i t h its emphasis on search has remained dominant, and has led to solutions that seem important within the closed world of Artificial Intelligencej but which perhaps are not very relevant to practical applicatio ...
... though their importance was recognized by many early researchers- The early framework w i t h its emphasis on search has remained dominant, and has led to solutions that seem important within the closed world of Artificial Intelligencej but which perhaps are not very relevant to practical applicatio ...

events:knowledge-workshop-iros2011:tikanmaki.pdf (340.2 KB)
... reating a software for the robot is a demanding task. How to connect all the parts, how to express past, present and future in a way that a robot can truly operate in the environment? How to define the task for the robot? How the information learnt could be used on another robot? And most of all, ho ...
... reating a software for the robot is a demanding task. How to connect all the parts, how to express past, present and future in a way that a robot can truly operate in the environment? How to define the task for the robot? How the information learnt could be used on another robot? And most of all, ho ...

white paper from the Workshop on Development and Learning.
... the development of response patterns in the retina, the lateral geniculate nucleus, and simple cells in the visual cortex. A particular subject that is now actively investigated concerns the mechanisms for developing orientational selectivity in the simple cells of the visual cortex. Some recent wor ...
... the development of response patterns in the retina, the lateral geniculate nucleus, and simple cells in the visual cortex. A particular subject that is now actively investigated concerns the mechanisms for developing orientational selectivity in the simple cells of the visual cortex. Some recent wor ...
Cognitive Robotics - 서울대 Biointelligence lab
... Endowing robots with mammalian and human-like cognitive capabilities to enable the achievement of complex goals in complex environments. Focused on using animal cognition as a starting point for the development of robotic computational algorithms As opposed to more traditional Artificial Intel ...
... Endowing robots with mammalian and human-like cognitive capabilities to enable the achievement of complex goals in complex environments. Focused on using animal cognition as a starting point for the development of robotic computational algorithms As opposed to more traditional Artificial Intel ...

An Associator Network Approach to Robot Learning by Imitation
... why certain regions of the brain are associated with specific cognitive function, the performance achieved would not be possible without this type of modularity [23]. Research into the form that regional brain modularity takes has focused on brain lesion examination and brain imaging techniques. As ...
... why certain regions of the brain are associated with specific cognitive function, the performance achieved would not be possible without this type of modularity [23]. Research into the form that regional brain modularity takes has focused on brain lesion examination and brain imaging techniques. As ...
AAAI Proceedings Template - Electronics and Computer Science
... performance capacities of biological systems are all perfectly objective, observable, and explicable properties, like all other physical properties. In contrast, with the "other-minds" problem, we each know perfectly well what it is that would be missing if others did not feel at all, as we do: feel ...
... performance capacities of biological systems are all perfectly objective, observable, and explicable properties, like all other physical properties. In contrast, with the "other-minds" problem, we each know perfectly well what it is that would be missing if others did not feel at all, as we do: feel ...
Behavior-Based Robotics
... (planning) to avoid bad solutions. Thinking too long can be dangerous (e.g., falling off a cliff, being run over). To think, the robot needs (a lot of) accurate information => world models. Introduction to Robotics ...
... (planning) to avoid bad solutions. Thinking too long can be dangerous (e.g., falling off a cliff, being run over). To think, the robot needs (a lot of) accurate information => world models. Introduction to Robotics ...

Mobile Robot Localization and Navigation in Artificial Intelligence
... 8. Mobile Robot Navigation Techniques Mobile robotics is a motivating area for use of artificial intelligence (AI), as it is a domain in which huge bodies of knowledge are needed to enable tasks like intelligent navigation in a large or complex facility while there at the same time is a need for rea ...
... 8. Mobile Robot Navigation Techniques Mobile robotics is a motivating area for use of artificial intelligence (AI), as it is a domain in which huge bodies of knowledge are needed to enable tasks like intelligent navigation in a large or complex facility while there at the same time is a need for rea ...

Exploring coordination properties within populations of distributed agents Elizabeth Sklar
... In the non-embodied multiagent systems (MAS) world, researchers are primarily concerned with understanding theoretically how systems might best coordinate, and they design simulated systems and mechanisms that approximate (or ignore) the physical world in order to demonstrate, test and evaluate theo ...
... In the non-embodied multiagent systems (MAS) world, researchers are primarily concerned with understanding theoretically how systems might best coordinate, and they design simulated systems and mechanisms that approximate (or ignore) the physical world in order to demonstrate, test and evaluate theo ...
ppt - people.csail.mit.edu
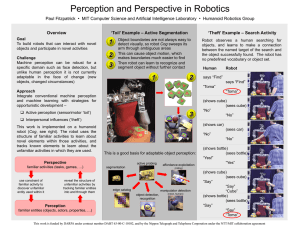
... specific domain such as face detection, but unlike human perception it is not currently adaptable in the face of change (new objects, changed circumstances) ...
... specific domain such as face detection, but unlike human perception it is not currently adaptable in the face of change (new objects, changed circumstances) ...

A Robotic Ecosystem with Evolvable Minds and Bodies
... based on using robots composed of simple mechatronic modules. However, the specific substrate is not very important for the concept itself and in general, the bodies can be made of traditional mechatronic components, (self-)assembled from simple modular units, formed by some soft material, 3D printe ...
... based on using robots composed of simple mechatronic modules. However, the specific substrate is not very important for the concept itself and in general, the bodies can be made of traditional mechatronic components, (self-)assembled from simple modular units, formed by some soft material, 3D printe ...

Anthropomorphism and the social robot
... a machine could think, Alan Turing came up in 1950 with what has become well known as the Turing Test [9]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was “only” a machine. This approac ...
... a machine could think, Alan Turing came up in 1950 with what has become well known as the Turing Test [9]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was “only” a machine. This approac ...
Robot

A robot is a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry. Robots can be autonomous or semi-autonomous and range from humanoids such as Honda's Advanced Step in Innovative Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) to industrial robots, medical operating robots, patent assist robots, dog therapy robots, collectively programmed swarm robots, UAV drones such as General Atomics MQ-1 Predator, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own.The branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.From the time of ancient civilization there have been many accounts of user-configurable automated devices and even automata resembling animals and humans, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.The word 'robot' was first used to denote a fictional humanoid in a 1921 play R.U.R. by the Czech writer, Karel Čapek. Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948. The first digital and programmable robot was invented by George Devol in 1954 and was named the Unimate. It was sold to General Motors in 1961 where it was used to lift pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.Robots have replaced humans in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea.There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising unemployment as they replace workers in increasing numbers of functions. The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.