Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Valve RF amplifier wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Schmitt trigger wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Operational amplifier wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Integrating ADC wikipedia , lookup
MIL-STD-1553 wikipedia , lookup
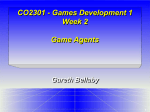
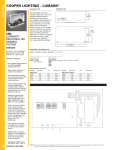
LABORATORY MODULE ENT 364 CONTROL SYSTEMS Semester 1 (2008/2009) EXPERIMENT # 1 PID NAME: PROGRAMME: DATE: GROUP: School of Computer & Communication Engineering University of Malaysia Perlis EXPERIMENT PID 1. OBJECTIVES The students should be able to: Explain the theory that governs the principles and the algorithm in a PID controller. Understand the definition and function of the PID parameters Recognize the methods to perform a step test on a PID controller and study the output responses of the different modes of control actions in the PID controller. P control mode PI control mode PD control mode PID control mode Demonstrate the skills of instrumentation in setting up a step test to obtain the different output responses of the PID controller. 2. Study gain and time constant or processes Study closed loop tuning process Familiarize with advance control such as cascade ,feed forward and ratio control INTRODUCTION 2.1 PID Algorithm The PID algorithm is placed inside instrument devices known as controllers. To execute the algorithm, process data parameters are keyed into the controller. The device is set to AUTO mode to allow smart control of the output signal when the input signal is compared to a determined setpoint. The controller used in the present experiment is the YS-170 Microprocessor based controller. This controller can be used as proportional controller, Proportional-Integral Controller, Proportional-Derivative Controller or Proportional-Integral-Derivative controller. The controller equations are as follows: Error, E X R X Y Kc E Proportion al controller : Proportion al Integral controller Proportion al Derivative controller Proportion al Integral Derivative controller 1 Y K c E Edt TI dE Y K c E T D dt 1 dE Y K c E Edt T D dt TI where X process variable (controlle r variable ) XR Y setpoint variable E error Kc proportion al gain TI integral time TD derivative time controller output A PID controller using the ideal or ISA standard form of the PID algorithm computes its output CO(t) according to the formula as shown in equation (1) and (2) accordingly. PV(t) is the process variable measured at time t and the error e(t) is the difference between the process variable and the setpoint. CO(t ) P.e(t ). I e(t )dt D. d .e(t ) dt (1) The "P" part of the controller is the proportional band or gain setting. Some controllers use proportional band, and others use it as proportional gain. They are related as: Proportional band (PB) = 100/Proportional gain (%) The "P" setting, the output of the controller is proportional to the change in the process variable. The "I" part of the controller is the integral or reset. With the "I" setting, the controller output continues to change based on the amount of time there is an error between set point and the process variable (PV). The "D" part of the controller stands for derivative or rate action. "D" action. With derivative action, the output of the controller changes based on the rate of change in the process variable. In practice, the PID control algorithm is given by: 1 dPV (t ) CO(t ) P e(t ) e ( t ) dt T D dt TI (2) The PID algorithm weights the proportional term by a factor of P, the integral term by a factor of P/T I, and the derivative term by a factor of P. T D where P is the controller gain, T I is the integral time, and T D is the derivative time. The Basic PID control action is the sum of individual proportional, integral and derivative terms. Unlike conventional analog controllers, there is no interaction between proportional, integral and derivative time settings. Derivative action with high frequency cutoff -rather than pure derivative action is used to prevent undue amplification of high-frequency noise. Derivative action is applied only to process variable changes, not to setpoint changes. 2.2 Response of Controllers to different inputs The proportional (P) controller can be studied by making a square wave input. For a proportional controller the response to a square wave is shown in Fig. 1 Output B A Input Fig. 1 Response of a proportional controller to square wave input (Proportional gain Kc=2) Similarly, the PI controller can be studied, to understand the influence of the integral time (I) characteristics. Set a step change or a square wave signal to the input of the controller. The integral time reduces the stead-state error by integrating the error with time. The error will be reduced accordingly. The response of a Proportional-Integral controller to a step input is shown in Fig. 2 The output will show a step change due to the proportional contribution and a ramp change due to the integral contribution as shown below. Respose to Step Input with PB=400% and TI=100s 6.000 5.000 Voltage (V) 4.000 KcA 3.000 A Slope= KcA/TI 2.000 1.000 DC Step Input (V) Output Response (V) 0.000 0 10 20 30 40 50 60 70 -1.000 Time(s) Fig. 2. Response of Proportional-Integral controller to a step input The proportional-derivative controller cannot be tested using a step input.The derivative parameter generally, is used to correct the error rate of the input. There are 2 methods of checking the characteristics of the derivative parameter. Method 1: We can use a sinusoidal input to test the Proportional- Derivative controller. The equation of a proportional derivative controller is given by: Y/Kc=TDs+1 Substituting s=j we can determine its frequency response as, Y/Kc=jTD+1 Therefore, AR=(1+2TD2) = tan-1(TD) A typical response curve of the proportional-derivative controller is shown in Fig. 3 The value of TD can be determined from the relationship, TD= 1/c. Bode Diagram Magnitude (dB) 15 10 5 0 Phase (deg) 90 60 30 0 -1 10 0 10 1 10 Frequency (rad/sec) Fig. 3. Bode diagram of Proportional-Derivative controller, TD=1 Method 2: If you use a step change or square wave signal, the derivative parameter produces a response like that of on impulse change. The output will deviate sharply towards 100% and then settle to a new value about 5% above its original value as shown. Derivative Time (TD) is expressed as: TD = m. td where, TD = Derivative Time m = Derivative Gain (b/a) = 8 td = Time Constant The figure below is a sample of derivative action on a step change. Fig 4: Response of derivative action to a step change 3. COMPONENT AND EQUIPMENT The equipment required for performing the experiments are shown in Table 1. Table 1: Equipment Required Equipment Model No Single Loop controller Yokogawa Model YS 170-1 DC Power Supply Goodwill GPR-3030 Paper less recorder Yokogawa Model DX104 Process Simulator Yokogawa YS170-2 Software Simulator or Yokogawa Model YEM-PS01 The following wiring layout is used to supply a step change to the controller. Refer to Fig 5 schematic for the connection Fig 5: Wiring schematic for P, I, D parameter investigation 3.1 YS170 PID Controller The YS170 controller an able to carry out flexible control and arithmetic operations which are required for process control, and have following features: Display, setting and operation of I/O values, various constants, and built-in control functions can be controlled easily from the full-dot LCD and key switches on the front panel. Trend display of process variable (PV) is possible. The built-in adjustable set-point filter can provide a better response to set-point changes. Communication functions can be installed to enable easy connection with a distributed process control system or computer. The self-diagnosis function can be used to check the operation of theinstrument and the status of the input and output signal lines. 3.2 DC Power Supply The DC Power Supply is used to create step input response to the controller. The input values are changed to create different DC levels that simulate a step change. Set the Current knob to minimum and the current selector to ‘LO’ Adjust the voltage knob ‘FINE’ centre position. Change the voltage output using the ‘COARSE’ knob and then with the ‘FINE’ knob to set the desired value to the controller. The total adjustment by the ‘FINE’ knob is approximately 3V.Do not at anytime set the current output beyond the minimum as this may damage the DX100 and YS170. 3.3 DX104 Paperless recorder The DX104 Paperless Recorder is used to record the result of the testing. The measured data can also be save to external storage media such as floppy disks. The data that have been saved to an external storage medium can be displayed on a PC by using the standard software,DXA100-02 that comes with the package. Use the cursor measurement function to calculate the time and voltage levels. The data can also be loaded onto the DX104 to be displayed. 3.4 Yokogawa Process Simulator The process simulator is a devise that is used to simulate process characteristics such as the process gain, 1st , 2nd and 3rd delay elements as well as create a disturbance input to the YS170-1 single loop controller. a) Software Simulator- This is a software process simulator that is programmed into the YS170-2. This is possible as the YS170 instrument is a programmable controller that can have a written programme to manipulate the data into the controller. Please refer to Appendix A3 for more description of the software simulator Before the set up of the experiment, please read the following Instruction Manual for the operation of each button/key function and how to do the data setting. a) b) c) IM1B7C1-01E, Single-Loop Programmable Controller, Model YS170 IM04L01A01-01E ,DAQSTATION DX100, Model DX104 82PR-3030 OMC DC Power Supply, Model GPR-S Series 4. PROCEDURE 4.1 Experiment 1: Proportional (P) Action 1). In the YS170-1 Single Loop Controller Go to the PID 1 Panel. Set the PROPORTIONAL BAND (PB1) to 400%, DERIVATIVE TIME (TD) to 0 sec. and INTEGRAL TIME (TI) to 9999 sec. on the tuning panel. Ensure the YS170- 1 display is shown as LOOP 1 2). Connect PV01 to Recorder Channel RCH1 and MV01 to Recorder Channel RCH2. 3). Put YS170-1 Single Controller to Manual mode and adjust the MV operation key so that the manual output is at 0% on the paperless recorderDX104. 4). Use the GPR –3030 DC Supply and put the signal to PV1 input .Apply 1 V (0%) input to controller and press the SV setting keys on the YS170-1 Single Loop Controller so that SV pointer is at 50%. The output is taken at MV1. DO NOT OPERATE MORE THAN 5V 5). Press the ‘START’ key on the recorder to begin recording. 6). Put controller into AUTO mode. The controller will now operate as a PROPORTIONAL action controller. Obtain the P action step response curves. 7). Perform a step change by rapidly change the input voltage from 1V to 4V (0% to 75%). Wait for 1 minute and then press the ‘STOP’ key to stop the recording on the paperless recorder. 8). Change the PB input to 350 % .Repeat steps 3 to 7 and obtain the response curves with proportional band .Use PB1 values according to table 2..Enter data into Table 2.(ALL Data can be obtain using Software) 9). Repeat the experiment using a step input value of 1V to 2V (0% to 25%). Use PB1 values of 25%,30% ,40%, 50%,60%,%,80%,100% and repeat step 2 to 7. Insert data into Table 2 10). Plot the theoretical and measured graph of System Gain versus Proportional Band in Fig 6. 4.2 Experiment 2: Proportional Plus Integral (PI) Action 1). In the YS170-1 Single Loop Controller Go to the PID 1 Panel .Set the PROPORTIONAL BAND (PB1) to 400%, DERIVATIVE TIME (TD) to 0 sec. and INTEGRAL TIME (TI) to 100 sec. on the tuning panel. 2). Put Controller to Manual mode and adjust the MV operation key so that the manual output is at 50% on the paperless recorder DX104. 3). Use the DC supply GPR-3030.Apply 1 V (0%) input to controller and press the SV setting keys so that SV pointer is at 25%. 4). Press the ‘START’ key on the recorder to begin recording.(PV01,MV01) 5). Put controller into AUTO mode. The controller will now operate as a PROPORTIONAL and INTEGRAL action controller. Obtain the PI action step response curves. 6). Perform a step change by rapidly change the input voltage from 1V to 5V (0% to 100%). Wait for 2 minute and then press the ‘STOP’ key to stop the recording on the paperless recorder. Plot the graph in Fig 7.DO NOT OPERATE MORE THAN 2V 7). Change the INTEGRAL TIME (TI) value to 100s .Repeat steps 2 to 6 and obtain the response curves. Use TI values of 100s, 80s, 60s, 40s, and 20s. 8). Use the DAQSTANDARD software, DXA100-02 to measure values in Table 3. The value of the step change in the output has a value of Kc.A and the slope of the ramp is given by (KcA/TI). Measure the value of A from the base and the slope dy/dx . Enter data into Table 3. Plot the theoretical and measured graph of Integral Time Fig 8. 4.3 Experiment 3: Proportional Plus Derivative (PD) Action 1). In the YS170-1 Single Loop Controller Go to the PID 1 Panel Set the PROPORTIONAL BAND (PB1) to 400%, DERIVATIVE TIME (TD) to 60 sec. and INTEGRAL TIME (TI) to 9999 sec. on the tuning panel. 2). Put Controller to Manual mode and adjust the MV operation key so that the manual output is at 50% on the paperless recorder DX104. 3). Apply 1 V (0%) input to controller and press the SV setting keys so that SV pointer is at 25%. 4). Press the ‘START’ key on the recorder to begin recording.(PV01,MV01) 5). Put controller into AUTO mode. The controller will now operate as a PROPORTIONAL and DERIVATIVE action controller. Obtain the PD Action step response curves. 6). Perform a step change by rapidly change the input voltage from 1V to 2V(0% to 25%). Wait for 2 minute until the curve is at steady-state and then press the ‘STOP’ key to stop the recording on the paperless recorder. Plot the graph in Fig 9. DO NOT OPERATE MORE THAN 5V 7). Change the DERIVATIVE TIME (TD) value to 40s, 20s and 10s..Repeat steps 2 to 6 and obtain the response curves. 8). Use the DAQSTANDARD software, DXA100-02 to measure values in Table 4. Use TD values of 20s, and 10s, Measure the time constant of the graph (ie the 63.2% mark). Calculate the derivative gain. Enter data into Table 4. 5. RESULT Result for Experiment 4.1: Table 2: Proportional band of the controller With High Level=5V and Low Level =1 V With High Level =2 V and Low Level = 1 V Result for Experiment 4.1: Fig. 6 Proportional gain of the controller Result for Experiment 4.2: Fig. 7 Step response of Proportional-Integral controller. Table 3. Integral Controller values TI Setting (s) Vbase ,(V) 100 90 80 70 60 50 40 30 20 10 Offset A V1 ( V) Gradient B dX dY dY/dX Offset A V1-vbase TI Measured (s) Fig. 8 Measured and experimental values of TI Result for Experiment 4.3: Fig 9: Derivative response curve Table 4. Derivative Controller values TD Setting (s) 60 40 20 10 Steady State Vb(V) Time Offset Value of TC Constant Va(V) (Vb-Va)x0.632 TC(s) Derivative Gain m=B/A Td Measured m x TC (s) 6. 1 DISCUSSION AND EVALUATION/EXERCISE Explain the effects of the following in a closed loop system a. P ControlEffect of changing PB __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ b. PI Control Effect of changing Integral TI __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ c. PD Control Effect of changing Derivative TD __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ d. PID Control Effect of changing PB __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ e. Effect of changing TI __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ f. Effect of changing TD __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ __________________________________________________________________ _________________________________________________________________ 7. CONCLUSION ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ DISCUSSION ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________