Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Factorization of polynomials over finite fields wikipedia , lookup
Theoretical computer science wikipedia , lookup
Natural computing wikipedia , lookup
Inverse problem wikipedia , lookup
Gene expression programming wikipedia , lookup
Multidimensional empirical mode decomposition wikipedia , lookup
Data assimilation wikipedia , lookup
Numerical continuation wikipedia , lookup
Algorithm characterizations wikipedia , lookup
Simplex algorithm wikipedia , lookup
Expectation–maximization algorithm wikipedia , lookup
Multi-objective optimization wikipedia , lookup
Mathematical optimization wikipedia , lookup
A Model and Methodology for Composition QoS Analysis of Embedded
Systems
Hui Ma, I-Ling Yen, Dongfeng Wang, Farokh Bastani
(hxm012600, ilyen, dxw018000, bastani)@utdallas.edu
Department of Computer Science
The University of Texas at Dallas
Abstract
Component-based development (CBD) techniques have
been widely used to enhance the productivity and reduce
the cost for software systems development. However,
applying CBD techniques to embedded software
development faces additional challenges. For embedded
systems, it is crucial to consider the Quality of Service
(QoS) attributes, such as timeliness, memory limitations,
output precision, battery constraints, etc. Frequently,
multiple components implementing the same functionality
with different QoS properties can be used to compose a
system. Also, software components may have parameters
that can be configured to satisfy different QoS
requirements. Composition analysis, which is used to
determine the most suitable component selections and
parameter settings to best satisfy the system QoS
requirement, is very important in embedded software
development process. In this paper, we present a model
and the methodologies to facilitate composition analysis.
We define QoS requirements as constraints and objectives.
Composition analysis is performed based on the QoS
properties and requirements to find solutions (component
selections and parameter settings) that can optimize the
QoS objectives while satisfying the QoS constraints. We
use a multi-objective concept to model the composition
analysis problem and use an evolutionary algorithm to
efficiently determine the Pareto-optimal solutions.
Keywords: Embedded software systems, Component
composition, Pareto-optimal, Quality of service (QoS),
Evolutionary Algorithm.
1. Introduction
Recent advances in hardware technology have
dramatically improved hardware productivity and made it
economically feasible to extend the reach of automation to
a wide variety of services, such as intelligent vehicles,
patient monitoring systems, handheld devices, sensor
networks, etc. However, the lack of commensurate gains in
software productivity is a major hurdle in developing more
sophisticated embedded applications. This is unfortunate
since software is crucial to the successful realization of
-1-
many application systems. Domain-specific knowledge is
usually embodied in the software. Also, software is
frequently expected to enhance the robustness of
application systems by monitoring the environment and
adapting the system to tolerate hardware failures, network
congestion, and security attacks.
To enhance the productivity of developing complex
applications, software technology is rapidly shifting away
from low-level programming issues to automated code
synthesis and the integration of systems from components.
Component-based development (CBD) techniques can
significantly reduce software development time and cost,
which can benefit the software development process for
embedded systems as well as other application domains
[15]. However, CBD approaches for embedded software
systems face additional challenges due to the stringent
QoS requirements for these systems. For example, it is
crucial to consider real-time, security, reliability, and
resource and power constraints in embedded systems.
Thus, the integration of embedded systems from
components must consider the satisfaction of the
functional requirements as well as the QoS requirements.
Frequently, multiple components with different QoS
tradeoffs can be used to achieve the same functionality.
Also, components may be configurable, i.e., some of the
program parameters of a component can be configured to
achieve different QoS tradeoffs [5]. It can be
computationally intensive to determine the most suitable
set of components to use with the best parameter settings.
For example, consider a small system consisting of 10
program units. Assume that there are two possible
components that match the functional requirements of each
program unit. Also, assume that each component has a
single parameter with 10 potential settings to achieve
various QoS tradeoffs. In an exhaustive search, there are
(2*10)10 choices to be considered in order to find out the
choices for a satisfactory QoS property of the system.
Thus, an efficient and effective decision making
mechanism is needed for QoS analysis in a CBD approach.
In this paper, we present a model for composition
analysis based on synchronous data flow (SDF) [14]. In
our model, the system specification includes the modules
that compose the system, the data flow among the
modules, and the QoS requirements of the system. A
module is a virtual unit defined by functional
requirements. Each module can be instantiated by some
configurable components that all satisfy the functional
requirement of the module. Based on the system
specification, the composition analysis determines which
components can be used and how to configure the selected
components to optimize the QoS objectives. We formulate
the composition analysis as a multi-objective optimization
problem and use an evolutionary algorithm to solve it.
Pareto-optimal solutions are obtained to determine suitable
component selections and parameter settings.
The remainder of this paper is organized as follows. In
the next section, we introduce the system model that forms
the basis of composition analysis. In Section 3, the
composition analysis problem, formulated as a multiobjective problem with Pareto-optimal solutions, is
presented. Section 4 discusses the evolutionary algorithm
used for composition analysis. An example and the
experimental study are then presented in Section 5. Section
6 finally states the conclusion of the paper.
2.
Model for Composition Analysis
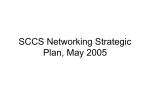
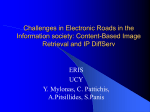
We are developing tools and techniques to assist
embedded software development. The architecture of a
repository-based embedded software development
platform is shown in Fig. 1. Each block in the diagram
involves a major tool set and technique. An online
repository for embedded software (ORES) forms the
foundation of the system. It provides effective component
retrieval and sophisticated components descriptions,
including functional and QoS properties of the
components. Many components in the repository are
configurable components. Also, we have developed a
Component Parameterizer Tool Set [5] which can be used
to parameterize the components in ORES. The QoS
properties in terms of various settings of the configurable
parameters of a component are measured and stored in the
repository for future analysis.
When developing an application, the designers interact
with the Composition Interface to prepare the system
specification, which includes the modules, the data flow
among modules, and QoS requirements of the system.
Based on the system specification, various components
satisfying the functional requirements are identified by the
Component Identifier. The Composition Analyzer tool set
performs QoS analysis based on the QoS requirement
specification and the QoS properties of the individual
components. The set of components to be used and the
settings of their configurable parameters are determined
from composition analysis so that the system requirements
can be satisfied. Finally, the code generator generates the
glue code and composes the system from the selected
-2-
components. In this paper, we focus on the Composition
Analyzer.
System
Designer
Composition Interface
(modules, data flow, QoS requirements)
Component Composition
Code
Component
Identifier
Analyzer
Generator Parameterizer
ORES
(Components)
Figure 1. Repository based embedded software development
platform.
2.1
System Specification Model
We consider a synchronous dataflow (SDF) model for
specifying an embedded system from existing components
[14]. Dataflow models handle regular computations that
operate on streams, which is popular in signal processing
system specifications. Each process in a dataflow model is
constructed as a sequence of atomic actors [15]. An actor
has an interface, which includes communication ports and
parameters that are used to configure the function of the
actor. With the synchronous feature, the SDF model is
predictable and can be scheduled statically. Thus, it is
extremely useful for the formalism of embedded real-time
software.
Our composition specification is based on the SDF
model. We replace the notion of actors by a virtual
functional unit, called a module. A module is specified by
its functional requirement and the descriptions for each
data input and output. It has to be instantiated by an actual
component in the repository. Since there may exist
multiple components that can satisfy the functional
requirement of a module, the module can be instantiated
by any of them based on the desired QoS properties or
other considerations. Using a module instead of the actual
component in the composition specification yields
flexibility and reusability of the system specification and
provides the potential for system reconfiguration.
Definition 1. [System Specification Model] The system
specification model is based on the SDF model and
defined as G = (, , ) where:
= {l | 1 l L} is the set of L modules
(actors). Each module l in is defined by a
functional requirement with which the actual
components in the repository can be selected to
instantiate it [24].
is the set of directed edges that denote the data
flows among the modules and the flow directions.
The number of data blocks produced or consumed
by each I/O port (input/output port of the data
flow) is also defined on E.
is the set of overall QoS requirements of the
system, which will be elaborated later in Definition
2.
A system designer can prepare the system specification
G that defines how to compose the components in the SDF
model to achieve a goal function. The components can be
selected from the repository and associated with the
modules in . Given the specification of a system G, the
set of components Cl = {cl,m | for all m} are identified,
where cl,m is the m-th component that can satisfy the
functional requirement of module l in . We define the
set of all components that instantiate the system as C = {Cl
| 1 l L}.
Note that dependency between some components may
affect component selection and configurable parameter
setting. For example, an encryption function may have to
be used with its corresponding decryption function
together. ORES allows the specification of component
dependencies [24], and these dependency constraints will
be observed during component selection.
2.2
QoS Attributes and Properties
We consider each measurable system property as a QoS
attribute. For example, in an audio processing system,
there may exist attributes such as execution time, memory
requirement, and voice quality, etc. Let A = (a1, a2, …, aN)
denote the vector of N QoS attributes for a system
specified by G, where each ai in A is a measurable QoS
attribute that has quantifiable values.
A component can be described by its functional
specifications and QoS properties. The QoS property of a
component is defined by the measurements of its QoS
attributes. Let Ac denote the set of QoS attributes of a
component c. Assume that c is a component selected to
instantiate a module in G. Generally, Ac is a subset of A.
Some QoS attributes of the system may have nothing to do
with some of the individual components that compose the
system. Also, a QoS attribute that is not relevant to G is
not useful for any component in G. In this paper, we
consider Ac = A for simplicity. The QoS property of
component c can be represented by a vector Vc = (vc1,
vc2, …, vcN), where vci is the QoS measurements of c in
terms of attribute ai. If the component c does not have a
certain measurable attribute ai, a NULL value is assigned
to vci. We assume that a module can only be instantiated by
one component. The QoS property V of a module is
defined to be the QoS properties Vc of the component c
that instantiates it. In a similar way, the QoS properties V
of the system G are defined to be the measurements of the
QoS attributes in A. The QoS properties of a system can be
derived from the QoS properties of the components that
compose the
system.
The QoS measurements of a system G can be
determined by the execution environment, input domain,
and configurable parameters. A configurable parameter is
-3-
a parameter in a component that, when adjusted, can
impact the measurements of one or more of the QoS
attributes. We assume that the execution environment and
the input domain are given. Different QoS properties of a
component and the composed system can be obtained by
tuning the configurable parameters. The configurable
parameters of each component form a K-dimensional
parameter set X = (x1, x2, …, xK) (where K is the total
number of configurable parameters). The QoS property vci
for attribute ai of a component c can be measured and
plotted against the K-dimensional parameter space. Let
fci(Xc) denote a property function of component c in term
of QoS attribute ai, where Xc is the parameter set of the
component c. A property function fci(Xc) is the relation that
maps the values of the parameter set Xc to a unique value
of vci for attribute ai. The property function vector Fc(Xc)
of a component c is defined as a vector of property
functions for all QoS attributes (fc1(Xc), fc2(Xc), …, fcN(Xc)).
For a system G, we define property function set as F =
{ Fc | c C } which is the set of property functions of all
components that comprise G.
2.3
QoS Requirements,
Constraints
Objectives,
and
As described in Definition 1, a system specification
includes the QoS requirements specification . For
embedded systems, it is crucial to consider the QoS
requirements in terms of the QoS attributes. For example,
the memory constraint can be defined on the memory
attribute of the system, and the requirement to maximize
the computation precision is defined on the precision
attribute of the system. We divide into two types of
requirements: constraints and objectives, according to the
requirements for being satisfied or optimized respectively.
In our model, each objective or constraint is based on one
or more QoS attributes. They are defined in the following.
Definition 2. [QoS requirements] For a system
specification G, the set of QoS requirements is defined as
= (O, R), where O = (o1, o2, …, oJ) is the set of
objectives, and R = (r1, r2, …, rI) is the set of constraints.
The objective o j, 1 j J, is an optimization function
denoted as j j(V) where j is an optimization operator,
such as maximize or minimize, and j(V) is an objective
function over QoS property V. Each QoS objective is to
optimize the system QoS properties over one or more QoS
attributes. A constraint ri is an inequality defined over V
specifying the bound for the system QoS property. It can
be expressed as follows:
i(V) i i (1 i I),
(1)
where i is the constraint function of G in terms of QoS
properties V, i is the comparison operator, and i is the
bound for i(V).
The goal of the system is to satisfy all the QoS
constraints while obtaining optimal solutions in terms of
the QoS objectives. All objective functions and
constraint functions of the system specification G are in
terms of QoS attributes A of G and can be computed from
the QoS properties V of G.
Example 1. Consider an IP phone system. Assume that
the execution time bound and the memory limitation are
the constraints that must be satisfied. This system may
include components such as a voice codec and echo
canceller. The voice quality and echo canceling quality are
the QoS objectives of the system. The QoS attributes for a
voice codec may be execution time, required memory, and
perceptual speech-quality measurement (PSQM). Here
PSQM is defined in ITU-T Recommendation P.861 to
measure the clarity of the voice. The QoS attributes for
echo canceller may include the execution time, required
memory, and Terminal Coupling Loss (TCL), an echo
canceling quality measure. So they have different QoS
attribute sets although they are in the same system. We can
define the QoS attribute set for the system as A = (a1, a2,
a3, a4) = (execution time, required memory, PSQM, TCL).
The QoS attribute sets for the voice codec and echo
canceller are the same but the TCL value will be set as
NULL for voice codec and the PSQM value will be set as
NULL for echo canceller.
2.4
Aggregation
The system QoS properties are the cumulative effect of
the QoS properties of the components that instantiate the
modules of the system. Here we express QoS properties of
a system G in terms of the QoS properties of the glue code
cg and the selected components {cl | 1 l L}, where cl
instantiates the module l of the system.
Definition 3. [Aggregate Operator] The Aggregate
Operator i is for computing the composition effect of the
properties of multiple modules of the system specification
G. It is presented as vi = i(vgi, v1i, v2i, …, vLi), 1 i N,
where L is the number of the modules, N is the number of
the attributes, vi is the QoS property of G in terms of
attribute ai, vgi is the property of the glue code in terms of
attribute ai, and vl i is the property of module l in terms of
attribute ai. For a system specification G, we define
aggregate operator set as Σ = { i | 1 i N }.
Aggregate operator computes the QoS properties of a
system from the QoS properties of the modules. Notice
that a module is a virtual unit. Its QoS properties are
determined by the component that instantiates it. In most
situations, we can assume the effect of the glue code is
small and can be omitted, so the aggregate operator can be
represented as vi = i(v1i, v2i, …, vLi).
Aggregate operator is highly application dependent. For
some common models, standard aggregate operators can
be defined. For example, in the SDF model, the aggregate
operator involves the computation of a schedule. Based on
-4-
the selected components, a schedule can be determined by
the algorithm discussed in [3]. With a fixed schedule the
aggregate system QoS properties, such as end-to-end
latency and memory requirement, can be computed.
3.
Composition
Specification
Analysis
Problem
In general, an embedded system has multiple QoS
objectives and multiple constraints. As shown in Example
1, the IP phone system has requirements to optimize voice
and echo canceling quality, and the constraints on the
execution time and the required memory. Thus, during the
composition analysis, the system configuration problem is
mapped to a constrained multi-objective optimization.
Given the specification of a system G = (, , ), the set
of components C that can satisfy the functional
requirements of each module in are identified. We
assume that each component c C is parameterized and
has configurable parameter set Xc. Special mechanisms to
make a component parameterizable have been discussed
[5]. The configurable parameters of the entire system can
be defined as X = {Xc | c C}. Let F be the set of property
functions and the aggregate operators of G. Notice that
C, X, F, are known factors of G for the composition
analysis. Let T denote all these known factors of G, where
T = (C, X, F, ). The composition analyzer can analyze the
composition based on the QoS constraints R and objectives
O of G with given T. The goal of composition analysis is
to determine the best selection of components to
instantiate the modules and find the best configurable
parameter settings to the components to optimize the QoS
properties of the system G. A feasible solution has to
satisfy constraints in R. Based on these feasible solutions,
the goal is to get the optimal benefits in terms of QoS
objectives in O. Here we discuss the multi-objective
problem of the composition analysis.
3.1
Multi-Objective Optimization Problem for
Composition Analysis
Here we formerly defined the multi-objective
optimization problem for composition analysis for a given
system specification G.
Definition 4. [Multi-Objective Optimization for
Composition Analysis]
optimize O = (o1, o 2, …, o J) (J 2)
subject to
QoS property set: V = (v1, v2, …, vN )
Constraints R: i(V) i i (1 i I)
Objectives O: o j = j j(V) (1 j J)
Each QoS property: vi = i(v1i, v2i, …, vLi)
Component selection: 1 sel(l) Mlwhere sel( l) is
the index of the selected component
Module QoS property: vli = m=1Ml((sel( l) − m) *
fl,mi(Xl,m)) where
i f x=0
x
0,otherwise
Our goal is to optimize all the objectives O of G. Note
that O is the objective set of the system with J objectives
and G has I constraints. As defined in Section 2.3, both
objectives and constraints of the system are in term of the
QoS attributes A. As described in Section 2.2, QoS
property of the components vl,m i can be derived from the
property function fl,mi and configurable parameters Xl,m.
Then the module QoS property vli can be determined by
component selection bl and the QoS property of the
selected component. As defined in Section 2.4, the QoS
property of the system vi can be computed from the QoS
properties of the modules with the aggregate operator i.
3.2
Pareto-optimal Solutions
Optimizing a system with multiple objectives may
result in conflicts [20]. The tradeoff between the multiobjectives must be considered and a decision can be made
based on it. Frequently the decision can be left to the
system designer with the help of the composition analysis
in a form of a solution set. Pareto-optimal solutions [20]
[4] are commonly used model for multi-objective
optimization problems. In our model, the goal for
composition analysis is to find the feasible Pareto-optimal
solutions.
For a problem with J objectives (o1, o 2, …, o J), a
solution s = (os1, os2, …, osJ) dominates another solution s′
= (os′1, os′2, …, os′J) if both of the following conditions are
satisfied:
s is no worse than s′ in any attributes,
s is strictly better than s′ in at least one attribute.
It can be denoted as s ≻ s′ or s′ ≺ s. A solution s is
defined as covering another solution s′ if s is no worse than
s′ in any attributes. It can be denoted as s ≽ s′ or s′ ≼ s.
If a solution s cannot be dominated by another solution
s′, it can be said that s is non-dominated by s′. If a solution
s is non-dominated by all other solutions in a solution set
, it is called the Pareto-optimal solution in . The set of
all the non-dominated solutions of is called the Paretoset of .
Recall that the first goal of the composition analysis
mentioned in Section 3.1 is to satisfy the QoS constraints
of the system specification and then to optimize the QoS
attributes, so the goal of the composition analysis is to find
the Pareto-set within the feasible solutions.
4.
Evolutionary Algorithm for Composition
Analysis
In this section, we discuss how to apply evolutionary
algorithm to the composition analysis problem discussed
in Sections 2 and 3. In Section 4.1, we survey and compare
several multi-objective evolutionary algorithms and
-5-
discuss the advantages of NSGA-II, which is selected as
the basis algorithm for composition analysis. Mapping of
the composition analysis problem into the evolutionary
algorithm model is discussed in Section 4.2. Finally in
Section 4.3, we introduce our NSGA-CAA algorithm for
composition analysis.
4.1
Multi-Objective Evolutionary Algorithms
As described in Section 3.2, for composition analysis,
we need to find Pareto-optimal solutions of the embedded
system based on multiple QoS objectives and constraints.
Some features of the composition can make the problem
very hard, which include the conflicting multiple
objectives, the exponentially increasing search space, and
the mix of continuous and discrete configurable
parameters of the components. The classical search
algorithms, such as linear programming and gradient
search, are not efficient for the multi-objective problems
[7]. Randomized algorithms can be used to deal with the
problems, such as local minimal trap, but they are not
always efficient.
An evolutionary algorithm is a partially randomized
exploratory procedure based on an analogy with the
biological evolution. Multi-Objective Evolutionary
Algorithms (MOEAs) have been shown to converge
quickly to the true Pareto-optimal solutions with a widely
spread solution set. Multi-Objective Genetic Algorithm
(MOGA) [9], Non-dominated Sorting Genetic Algorithm
(NSGA) [18], Niched Pareto Genetic Algorithm (NPGA)
[12] are early MOEAs using non-dominated sorting with a
niching mechanism to improve the diversity of the
solutions. Elitism has been shown to be an important
factor for improvement on the MOEAs [26]. Elitism is a
strategy to preserve better solutions in an external archive.
Subsequent algorithms, such as, the improved version of
Non-dominated Sorting Genetic Algorithm (NSGA-II) [8],
Pareto-archived Evolution Strategy (PESA) [6], and the
improved version of Strength-Pareto Evolutionary
Algorithm (SPEA2) [27], have incorporated strategies to
realize elitism to gain significant performance
improvements.
An elitism algorithm NSGA-II has been introduced [8]
that yields significant improvement in time complexity,
diversity preservation, and constraint satisfaction. It is
shown that the algorithm outperforms PESA and SPEA
[25] in terms of finding a diverse set of solutions and in
converging near the true Pareto-optimal set. V. Khare et al.
[13] have compared the scalability of the algorithms with
respect to the number of objectives (two to eight): NSGAII, PESA, and SPEA2. The result shows that PESA is the
best algorithm in terms of converging to the Paretooptimal front, but is poor in diversity maintenance. SPEA2
and NSGA-II perform equally well on convergence and
diversity maintenance, but NSGA-II converges faster than
SPEA2. Thus, we use NSGA-II as the basis algorithm for
the composition analysis and make improvements to it for
the specific problem we have defined.
4.2
Mapping
the
Composition
Analysis
Problem to the Evolutionary Algorithm
The goal of the composition analysis is to find Paretooptimal solutions of the system based on multiple
objectives O while satisfying the QoS constraints R (as
defined in Definition 2). Here we map this problem to the
evolutionary algorithm paradigm.
4.2.1
Individual Representation
Each individual in the population represents a solution
of the embedded system, which includes the component
selections and the configurable parameter settings.
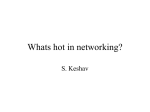
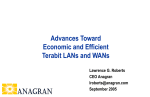
Fig. 2 illustrates how an individual solution is
represented in a hierarchical view. The vector consists of
rep( l), for all l, which represents the characteristics of the
set of modules that comprise the system (as shown in Fig.
2a). Each rep( l) is further represented by sel( l) and
rep(cl,m), 1 m Ml, where rep(cl,m) is the characteristics
of the component cl,m and sel( l) is the index of the
component selected to instantiate the module (as shown in
Fig. 2b). The value for sel( l) is in the range [1, Ml] where
Ml is the number of components. If there is only one
component to instantiate l, then sel( l) is not needed and
rep( l) is the same as rep(cl,1). If the module has more
than one candidate component, then rep(cl,m), for all m, are
listed one by one after sel( l). A component
representation, rep(cl,m), is further characterized by its
configurable parameters xi(cl,m) (as shown in Fig. 2c).
Configurable parameters may have different data types,
such as float, integer, and discrete values. For the
convenience of mutation operator described later in
Section 4.2.2, we require each configurable parameter to
have a fixed range. For configurable parameters without
lower and upper bounds, a relatively large range is
assigned. Due to the inherited limitations imposed by
hardware on the data values, these extended bounds have
no significant impact on the evolutionary process. Note
that all the component selection parameters sel( l) and
configurable parameters xi(cl,m) are basic elements in an
individual representation and are called the genes of the
individual.
4.2.2 Mutation
In a mutation process, a new individual is generated from a
randomly picked individual by modifying it slightly. The
probability of mutation of one individual is controlled by a
mutation rate, which is normally set as 1/K where K is the
population size. Here we set it as 0.01 for our experimental
study. For the individual to be mutated, the mutation point
is chosen randomly and the gene of the mutation point is
modified. We use a random value in a predetermined
range to replace the existing gene. An individual has
-6-
sel( l) and configurable parameters as its genes. sel( l)
has clear upper and lower bounds. As described in Section
4.2.1, each configurable parameter has a fixed range. Thus,
we define the mutation function mu(x) as follows:
x = mu(x) = U(xl, xu),
(2)
where x is a gene in the individual, x is the new gene
value, xl and xu are the lower and upper bounds of x,
respectively, and U(xl, xu) is a uniform random value
between xl and xu.
Since the mutation point is chosen randomly, it may
correspond to a configurable parameter of a component
that is not selected. In this case, the mutation operator is
a. Whole individual representation of the system with L
modules l (1 l L):
rep(1)
rep(2)
…
rep(L)
b. The representation of module rep(l) (1 l L):
[sel(l)]
rep(cl,1)
[rep(cl,2)]
…
[rep(cl,Ml)]
c. The representation of component rep(cl,m) (1 l L, 1
m Ml):
x1(cl,m)
x2(cl,m)
…
xK(cl,m)
Figure 2. Individual representation.
ineffective. We call this problem selection redundancy
problem. It is caused by the multiple candidate
components for instantiating one module. Our solution is
to change the component selection as well. When the
mutation point locates on the representation of component
cl,i but sel(l) i, then we set sel( l) = i.
4.2.3
Recombination
While mutation generates a new individual from one
parent, recombination process exchanges the genes
between more than one parent to reproduce new
individuals. We use one-point recombination due to its
effectiveness and simplicity. Similar to the mutation
process, the crossover point for recombination of two
individuals is generated randomly. The one-point
recombination process exchanges the genes of two parents
on and after the crossover point to reproduce two
offsprings.
The selection redundancy problem introduced in
Section 4.2.2 also occurs in the recombination process.
When the crossover point locates on the component
selection value sel( l), the genes for module l of two
parents are exchanged totally. When the crossover point is
on a configurable parameter of a component cl,m (1 m
Ml), the situations are different for m sel(l) and m >
sel( l). The exchange of the genes has no effect on
module l in the second situation. In the situation m >
sel( l) , we set sel( l) = m. We improve the one-point
recombination operator to One-Point Composition
Analysis Recombination (OPCAR) operator to take the
selection redundancy problem account. The algorithm for
OPCAR operator is given as follows.
Algorithm OPCAR
Input:
s1, s2: two parents
Output: s1′, s2′: two offspring
1 s1′ := s1
2 s2′ := s2
3 set j as length of s1
4 i := U(1, j)
5 let i be in the representation of module l
6 if s1′.sel(l) < I
7
s1′.sel(l) := I
8 if s2′.sel(l) < I
9
s2′.sel(l) := I
10 while (i j)
11
s1′(i) = s2(i)
12
s2′(i) = s1(i)
13
i := i + 1
The probability of recombination of two individuals is
generally bounded. We set it to 0.8 in our model.
4.3
NSGA-CAA Algorithm
First, we discuss the special techniques used in NSGAII [8]. NSGA-II uses the crowding pick approach. It first
uses non-dominated sort to give each solution a priority.
Then the crowding distance sort is used to further sort the
solutions with the same priority decided by the nondominated sort. Non-dominated sort first gives the nondominated solutions of a set the highest priority, then
removes them and gives the non-dominated solutions of
the remaining set the second highest priority, and so on,
until all the solutions are given priorities. The crowding
distance computation first sorts the same priority solutions
according to each objective. The solutions with highest or
lowest value are then assigned an infinity distance value.
The distance values of all other intermediate solutions are
the amount of the absolute normalized differences between
the objective values of two adjacent solutions for each
objective. The solution with a larger distance value gets a
higher priority. With non-dominated sort and crowding
distance sort, we can pick K highest priority solutions
from the union of previous population and elite set as new
elite set. Elite set is an external set different with the
population. The algorithm maintains it to store a fixed
number of solutions that are non-dominated among all
solutions ever generated. For the population with size K of
a J-objective problem, NSGA-II has a storage requirement
O(K 2) and time complexity O(JK2).
The algorithm NSGA-CAA based on NSGA-II for
composition analysis is shown in the following.
Algorithm NSGA-CAA
Input:
K: population and initial elite set size
T: generation number
Output:
Pr: result non-dominated set
1
Initialize population P0
2
fast-non-dominated-sort(P0)
-7-
3
Create empty elite set P0′
4
t := 0
5
while (t < T) do
6
P t+1′ := NSGA-crowding-pick (Pt, Pt′, K)
7
Select Pt+1 from P t+1′
8
Recombine Pt+1
9
Mutate Pt+1
10
fast-non-dominated-sort(Pt+1, Pt+1′)
11
t := t + 1
12 end while
13 Pr := non-dominated-set (Pt′)
The Evolutionary Algorithm utilizes a learning process
on the population (the collective of the individuals that
represent the solutions of a problem). Each individual
consists of genes that are the decision variables of the
solution. In NSGA-CAA, an elite set is maintained in each
generation by picking the first N individuals from the
population and the elite set of previous generations.
In steps 7, 8, and 9 of the algorithm, we use binary
tournament selection, one-point recombination, and onepoint mutation to generate the new population. By binary
tournament selection (BTS), in each generation, we select
K solutions from elite set. Each time two solutions are
picked from the elite set randomly and one solution with
higher priority according to non-dominated sort and
crowding distance sort is selected. It continues till we get
K solutions. The BTS algorithm is shown as follows.
Algorithm BTS
Input:
K: population size
P: elite set
Output:
P′: result new population
1
k := 0
2
while (k < K) do
3
randomly pick up two individual s1, s2 from P
4
if s1 has higher priority
5
Put s1 in P′
6
else
7
Put s2 in P′
8
end while
In the system requirements, there are constraints (R) as
well as objectives (O). Thus, we need to also consider R in
the evolutionary process. We use the constraint handling
approach discussed in [8]. The approach handles
constraints without destroying the modularity in NSGA-II.
It modifies the definition of “dominate” to “constraineddominate”. A solution s is said to constrained-dominate a
solution s′ if any of the following conditions are true: (a)
solution s is feasible and solution s′ is not, (b) solutions s
and s′ are both infeasible, but solution s has a smaller
overall constraint violation, or (c) solution s and s′ are
feasible and solution s dominates solution s′. We replace
the operation “dominate” by “constrained-dominate” in
NSGA-CAA. The overall constraint violation of a solution
in condition (b) is computed by adding the normalized
distance between solution value and constraint for each
violated constraint.
With this constraint handling approach, the result
solutions may converge to satisfy the QoS constraints (R).
But in some cases, the evolutionary algorithm cannot
obtain feasible solutions. The algorithm then presents the
solutions nearest to the constraints bounds and provides
options for user to choose, such as rerun the algorithm
with more generation rounds, relax the QoS constraints, or
insert more candidate components, etc.
When the solutions satisfy the QoS constraints, the
result of the composition analysis is a small set of feasible
Pareto-optimal solutions. Comparing to the original
exponential exploration space, the result set is much
smaller. This set can be further reduced to a fixed number
of solutions using the crowding-distance rating. On each
round, the algorithm removes the individual with the
smallest crowding-distance. This step can be repeated until
the preset size of result is reached.
5.
Case Study
In this section, we go through the whole composition
analysis process by analyzing an example system G
composed of 9 modules l, 1 l 9. The system G has
two QoS objectives O = (o1, o2) and two constraints R =
(r1, r2) in terms of four QoS attributes A = (a1, a2, a3, a4).
We simulate property functions of each component
using test functions for multi-objective evolutionary
algorithm. These two-objective functions are introduced or
cited by Zitzler et al. [26], [27] to compare the
evolutionary algorithms. We choose some of them, listed
in Table 1, which include general situations of the twoobjective optimization problem. These functions are both
for minimization problems and each one has two property
functions, which are given by fi, 1 i 2. In Table 1, the
domain column presents the range of the parameters and K
denotes the number of parameters. Note that K is not fixed
for each test function. Here the variables xi, for all i,
simulate the configurable parameters of the components.
The characteristics column lists the Pareto-optimal front
characteristic of each function.
We use these test functions to represent the property
functions of the components. The number of configurable
parameters |Xl,m| and property functions fl,mj (1 j 4) of
six components cl,m are shown in Table 2. Due to page
-8-
limitation, we do not show all of them here. The ranges of
the configurable parameters are the same as the domain of
the functions assigned to the components.
Table 3 shows the aggregate operators of the system G
based on the nine modules l, 1 l 9. The objective
function j of o j, 1 j 2, and the constraint function i
of r i, 1 i 2, for G are presented in Table 4. We set both
QoS objectives as minimization problems and each QoS
constraint has an upper bound.
After preparing the system specification G, we set
NSGA-CAA to analyze the composition of G. Here the
population size is set to 100 and generation number 200.
The result set can be reduced by removing the individuals
with the smallest crowding-distance. That is, in each round
an individual with the smallest distance to its neighbors is
found and removed from the set. It keeps on running until
the result set is reduced to a fixed number, which is set to
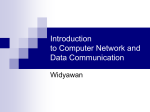
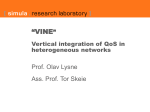
20 here. The result of composition analysis is shown in
Fig. 3.
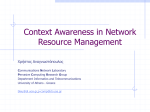
Figures 3a and 3b show the solutions in the objective
and constraint space, respectively. Each small red
rectangle in the figures represents a solution. There are 20
solutions. Fig. 3a demonstrates the tradeoff between
objectives o1 and o2. Fig. 3b shows the same 20 solutions,
but in the constraint space.
In Sections 4.2.2 and 4.2.3, we improved the general
mutation and recombination operators of the evolutionary
algorithm to resolve the selection redundancy problem.
The effect of the improvement was studied by comparing
the Pareto-optimal solutions obtained by the algorithm
NSGA-CAA with different operators. Fig. 3 shows that
improved operators can provide better convergence to the
real Pareto-optimal front and yield better constraint.
6.
Related Work
Previous research work regarding software component
selection for satisfying QoS specification is limited. An
NFR-Assistant tool has been presented [22] that assists
Table 1. Test problems for simulating the property functions.
Name
KUR
Type
min
Domain
[5, 5]K
QV
min
[5, 5]K
ZDT1
min
[0, 1]K
ZDT2
min
[0, 1]K
ZDT3
min
[0, 1]K
ZDT6
min
[0, 1]K
Test functions
f1 = i=1K ( |xi|0.8 + 5sin3(xi)) + K
f2 = i=1K 1(1 exp(0.2 (xi2 + xi+12)1/2 ))
f1 = ( (1/n) · i=1K (xi2 10cos(2xi) + 10) )0.25
f2 = ( (1/n) · i=1K ((xi 1.5)2 10cos(2(xi 1.5)) + 10) )0.25
f1 = x1
g = 1 + 9·i=2K xi / (K 1)
f2 = g · (1 (f1 / g) ½)
f1 = x1
g = 1 + 9·i=2K xi / (K 1)
f2 = g · (1 (f1 / g) 2)
f1 = x1
g = 1 + 9·i=2K xi / (K 1)
f2 = g · (1 (f1 / g) ½ (f1 / g) · sin(10f1)) + 1
f1 = 1 exp(4 x1) · sin6(6x1))
g = 1 + 9 · ((i=2m xi ) / (m 1))0.25
f2 = g · (1 (f1 / g)2 )
Characteristics
Both convex and
non-convex
Non-convex
front
Convex front
Non-convex
front
Noncontiguous
convex
Non-uniformly,
lower density
Table 2. Configurable parameters and attribute functions of the
components.
(a) Comparison in the objective space.
(b) Comparison in the constraint space.
Figure 3. NSGA-CAA with improved operators vs. normal
operators.
-9-
cl,m
|Xl,m|
c1,1
c1,2
c1,3
c2,1
c2,2
c3,1
3
4
3
4
5
4
fl,m1
ZDT3. f1
ZDT1. f1
ZDT1. f1
ZDT3. f1
ZDT3. f1
QV. f1
Property functions for cl,m
fl,m2
fl,m3
fl,m4
ZDT3. f2 ZDT6. f1 ZDT6. f2
ZDT1. f2 ZDT2. f1 ZDT2. f2
ZDT1. f2 ZDT2. f1 ZDT2. f2
ZDT3. f2 ZDT6. f1 ZDT6. f2
ZDT3. f2 ZDT6. f1 ZDT6. f2
QV. f2
KUR. f1 KUR. f2
with the nonfunctional (QoS) requirement analysis and
exploration of design alternatives through a graphical
interface. The approach can be used for automated design
decision-making, but it is based on exhaustive search and
only considers one nonfunctional attribute at a time. The
real-time requirement has been addressed [21] and tools
have been provided for the selection of components
satisfying real-time constraints. The approach uses an
exhaustive search and only considers real-time aspects.
The trade-off problem for a software agent pipeline
system has been formulated [23] and the expression for
optimized time-quality attributes has been derived.
However, a continuous quality and time function is
considered which is not always applicable for the
selection of components and their parameter settings.
Along another direction, code synthesis techniques
have been used to facilitate the component integration
process. Ptolemy [15] provides a framework for
simulating
Table 3. Aggregate operators of the system.
QoS attributes
a1
Aggregate function
v1 = 2.0 * v11 + v21 + v31 + 2.0 * v41 +
v51 + v61 + 2.0 * v71 + v81 + v91
v2 = v12 * v22 * v52
3
v = max(v33 , v43 , v63 , v73, v83, v93)
v4 = v14 + 0.8 * v24 + 2.0 * v34 + 2.0 *
v44 + v54 + 0.5 * v64 + v74
a2
a3
a4
component based embedded software development. The
component composition analysis of the system is based on
the QoS requirements of the system and can provide a set
of non-dominated solutions, which indicate the
component selections and parameter settings of the
system. Evolutionary algorithm is used to search in the
solution space and obtain solutions with good
performance in terms of multiple QoS objectives. We use
an example to go through all the steps of composition
analysis and provide a result set of feasible solutions.
Table 4. Objective / constraint functions of the system.
QoS
requirements
o1
2
o
r1
r2
Objective / constraints
functions
1 = v1 + v4
2 = v2 + v3
1 = v3
2 = v4
Operators
Min
Min
14
9
and synthesizing embedded systems. A user can compose
a system from components. Code generation in Ptolemy
focuses on buffer management and component scheduling
[1] [16]. Chinook [2], a successor of Ptolemy, supports
code synthesis for multiple platforms and various
component interfaces. These approaches are successful in
modeling embedded software at an abstract level to
facilitate code synthesis for various platforms, but they do
not address the problem of selection of components to
satisfy the QoS requirements of the system. Users have to
specify specific components that are used to compose a
system or a subsystem. VEST [19] is a toolset for
constructing component-based embedded systems by
analyzing the component dependencies and nonfunctional
requirements. However, this toolset does not provide
optimization search on the feasible configurations and
does not consider the components with parameters that
can be configured to achieve different QoS properties.
Several research works consider QoS issues in
component-based software development. Most of them
focus on prediction of system QoS properties. Hissam et
al. [11] presented a prototype prediction-enabled
component technology (PECT) to integrate a software
component technology with one or more analysis
technologies. The prediction of end-to-end latency of an
assembly has been provided as an example. The
theoretical and empirical validities of prediction show that
the composition analysis is reasonable. The prediction of
other properties, such as resource consumption [17],
reliability [10], also has been presented. These works
form a solid foundation of composition analysis and can
be embedded in our model.
7.
Conclusion
We have developed a composition analysis model for
- 10 -
References
[1] S.S. Bhattacharyya, P.K. Murthy, and E.A. Lee, "Synthesis
of Embedded Software from Synchronous Dataflow,"
Journal of VLSI Signal Processing Systems, vol. 21, no. 2,
June 1999.
[2] G. Borriello, P. Chou and R. Ortega, “Embedded System
Co-Design Towards Portability and Rapid Integration,”
Hardware/Software Co-Design: Proc. of the 1995 NATO
Advanced Study Institute, M. Sami and G.D. Micheli, eds.,
Kluwer Academic Publishers, pp. 243-264, 1995.
[3] J.T. Buck, “Scheduling Dynamic Dataflow Graphs with
Bounded Memory Using the Token Flow Model,” PhD
thesis, Univ. of California, Berkeley, 1993.
[4] V. Chankong and Y.Y. Haimes, Multiobjective Decision
Making Theory and Methodology, New York: NorthHolland, 1983.
[5] K. Cooper, J. Zhou, H. Ma, I-L. Yen, and F. B. Bastani,
“Code Parameterization for Satisfaction of QoS
Requirements in Embedded Software,” Proc. of the Int’l
Conf. on Eng. of Reconfigurable Systems and Algorithms,
pp. 58-64, June 2003.
[6] D.W. Corne, J.D. Knowles, and M.J. Oates, “The Pareto
Envelop-based Selection Algorithm for Multiobjective
Optimization,” Parallel Problem Solving from Nature –
PPSN VI, M. Schoenauer et al., eds, Berlin. Springer, pp.
839-848, 2000.
[7] K. Deb, Optimization for Engineering Design: Algorithms
and Examples, New Delhi: Prentice-Hall, 1995
[8] K. Deb, A. Pratap, S. Agarwal, and T. Meyarivan. “A Fast
and Elitist Multiobjective Genetic Algorithm: NSGA-II,”
IEEE Trans. Evolutionary Computation, vol. 6, no. 2, pp.
182-197, Apr. 2002.
[9] C.M. Fonseca and P.J. Fleming, “Multiobjective
Optimization and Multiple Constraint Handling with
Evolutionary Algorithms—Part I: A Unified Formulation,”
IEEE Trans.Systems, Man, and Cybernetics-Part A:
Systems and Humans, vol. 28, no. 1, pp 26-37, Jan. 1998.
[10] D. Hamlet, D. Mason, and D. Woit, “Theory of Software
Reliability Based on Components,” Proc. of the 23rd Int’l
Conf. on Software Eng., pp. 361-370, May 2001.
[11] S. A. Hissam, G. A. Moreno, J. Stafford, K. C. Wallnau,
“Packaging Predictable Assembly with Prediction-Enabled
Component Technology,” CMU/SEI-2001-TR-024, Nov.
2001.
[12] J. Horn, N. Nafpliotis, and D.E. Goldberg, “A Niched
Pareto
Genetic
Algorithm
for
Multiobjective
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
Optimization,” Proc. of the First IEEE Conf. on
Evolutionary Computation, vol. 1, pp. 82-87, 1994.
V. Khare, X. Yao, and K. Deb, “Performance Scaling of
Multi-objective Evolutionary Algorithms,” Proc. Of the
Second Int’l Conf. on Evolutionary Multi-Criterion
Optimization, pp. 376-390, 2003.
E.A. Lee and D.G. Messerschmitt, “Synchronous Data
Flow,” Proc. of the IEEE, vol. 75, no. 9, pp. 1235-1245,
Sept. 1987.
E.A. Lee, "Overview of the Ptolemy Project," Technical
Memorandum UCB/ERL M01/11, University of California,
Berkeley, Mar. 2001.
T. Miyazaki and E.A. Lee, "Code Generation by Using
Integer-Controlled Dataflow Graph," Proc. of ICASSP 97,
pp.703-706, Apr. 1997.
J. Muskens, M. Chaudron, “Prediction of Run-Time
Resource Consumption in Multi-task Component-Based
Software Systems,” Proc. of the 7th Int’l Symposium on
Component-Based Software Eng., May 2004.
N. Srinivas, K. Deb, “Multiobjective Optimization Using
Nondominated
Sorting in Genetic
Algorithms,”
Evolutionary Computation, vol. 2, no. 3, pp. 221-248, 1994.
J.A. Stankovic, “VEST – A Toolset for Constructing and
Analyzing Component Based Embedded Systems,” Proc.
of the First Int’l Workshop on Embedded Software, pp.
390-402, Oct. 2001.
E. Steuer, Multiple Criteria Optimization: Theory,
Computation, and Application, Wiley, 1986.
R.A. Steigerwald, “Reusable Component Retrieval for
Real-time Applications,” Proc. IEEE Workshop on RealTime Applications, pp. 118-120, May 1993.
Q. Tran and L. Chung, “NFR-Assistant: Tool Support for
Achieving Quality,” IEEE Symp. Application-Specific
Systems and Software Engineering and Technology, pp.
284-289, Mar. 1999.
I-L. Yen and I.-R. Chen, “Reliability Assessment of
Multiple-agent Cooperating Systems,” IEEE Trans.
Reliability, Sep. 1997.
I-L. Yen, L. Khan, B. Prabhakaran, F.B. Bastani, J. Linn,
“An On-line Repository for Embedded Software,” 13th
IEEE Int’l Conf. on Tools with Artificial Intelligence, pp.
314-320, Nov. 2001.
E. Zitzler and L. Thiele, “Multiobjective Evolutionary
Algorithms: A Comparative Case Study and the Strength
Pareto Approach,” IEEE Trans. Evolutionary Computation,
vol. 3, no. 4, pp. 257-271, 1999.
E. Zitzler, K. Deb, and L. Thiele. “Comparison of
Multiobjective Evolutionary Algorithms: Empirical
Results,” Evolutionary Computation, vol. 8, no. 2, pp. 173195, 2000.
E. Zitzler, M. Laumanns, and L. Thiele, “SPEA2:
Improving the Strength Pareto Evolutionary Algorithm for
Multiobjective Optimization,” Proc. of the EUROGEN2001
Conference, pp. 95-100, 2001.
- 11 -