


Regularization Tools
... The following is a list of the major changes since Version 2.0 of the package. • Replaced gsvd by cgsvd which has a different sequence of output arguments. • Removed the obsolete function csdecomp (which replaced the function csd) • Deleted the function mgs. • Changed the storage format of bidiagona ...
... The following is a list of the major changes since Version 2.0 of the package. • Replaced gsvd by cgsvd which has a different sequence of output arguments. • Removed the obsolete function csdecomp (which replaced the function csd) • Deleted the function mgs. • Changed the storage format of bidiagona ...
Lecture 13 Introduction to High-Level Programming (S&G, §§7.1–7.6)
... From Algorithms to Programs • Algorithms are essentially abstract things that can have – Linguistic realizations (in pseudocode or programming languages) – Hardware realizations (in digital circuitry) ...
... From Algorithms to Programs • Algorithms are essentially abstract things that can have – Linguistic realizations (in pseudocode or programming languages) – Hardware realizations (in digital circuitry) ...



Tree-Based State Generalization with Temporally Abstract Actions
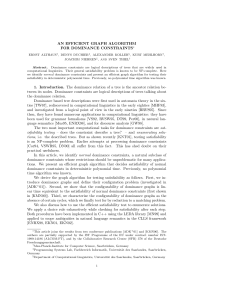
... but the authors are unaware of any of these techniques that, in practice, achieve significant temporal abstraction. In this chapter we introduce the Trajectory Tree, or TTree, algorithm with two advantages over previous algorithms. It can both learn an abstract state representation and use temporal ...
... but the authors are unaware of any of these techniques that, in practice, achieve significant temporal abstraction. In this chapter we introduce the Trajectory Tree, or TTree, algorithm with two advantages over previous algorithms. It can both learn an abstract state representation and use temporal ...
109_lecture4_fall05
... If A(x) and B(x) are polynomials with B not zero then there are unique polynomials Q(x) and R(x) such that A(x) = B(x)Q(x) + R(x) with R(x)=0 or degree R(x) < degree B(x) Note that R(x) = 0 is another way to say that B(x) divides A(x). ...
... If A(x) and B(x) are polynomials with B not zero then there are unique polynomials Q(x) and R(x) such that A(x) = B(x)Q(x) + R(x) with R(x)=0 or degree R(x) < degree B(x) Note that R(x) = 0 is another way to say that B(x) divides A(x). ...
ppt - Dave Reed
... these are classic examples, but pretty STUPID recursive approach to Fibonacci has huge redundancy can instead compute number using a loop, keep track of previous two numbers recursive approach to Factorial is not really any simpler than iterative version can computer number using a loop i=1. ...
... these are classic examples, but pretty STUPID recursive approach to Fibonacci has huge redundancy can instead compute number using a loop, keep track of previous two numbers recursive approach to Factorial is not really any simpler than iterative version can computer number using a loop i=1. ...

Modular curves, Arakelov theory, algorithmic applications
... In [17], the divisor D0 is chosen such that this map is an isomorphism over J1 (n)[m]. The method of choosing such a divisor that is used in [17] does not work in our more general situation. This problem is solved as follows. We take D0 = gO, where O is a rational cusp of X1 (n). With this choice, t ...
... In [17], the divisor D0 is chosen such that this map is an isomorphism over J1 (n)[m]. The method of choosing such a divisor that is used in [17] does not work in our more general situation. This problem is solved as follows. We take D0 = gO, where O is a rational cusp of X1 (n). With this choice, t ...


Gap Inequalities for the Max-Cut Problem: a
... This primal stabilisation scheme was inspired by the ‘box-step’ method of Marsten et al. [20], which is a classical technique for dual stabilisation in the context of Lagrangian relaxation and Dantzig-Wolfe decomposition. Of course, one can use our scheme only if an SDP solver is available. Gap stre ...
... This primal stabilisation scheme was inspired by the ‘box-step’ method of Marsten et al. [20], which is a classical technique for dual stabilisation in the context of Lagrangian relaxation and Dantzig-Wolfe decomposition. Of course, one can use our scheme only if an SDP solver is available. Gap stre ...

Non-Negative Matrix Factorization Revisited: Uniqueness and
... . Without loss of generality, we assume case, so there is no all-zero column or row in any matrix. If this happens, we can simply delete it (them) first. II. CONVEX ANALYSIS PRELIMINARIES Before we analyze the properties of NMF, we briefly review some prerequisites from convex analysis; see [32], [3 ...
... . Without loss of generality, we assume case, so there is no all-zero column or row in any matrix. If this happens, we can simply delete it (them) first. II. CONVEX ANALYSIS PRELIMINARIES Before we analyze the properties of NMF, we briefly review some prerequisites from convex analysis; see [32], [3 ...


Set 2
... For each (distinct) pair of points in the set, compute a, b, and c to define the line ax + by = c. For each other point, plug its x and y coordinates into the expression ax + by – c. If, for all the other points (x,y), ax + by – c has the same sign (all positive or all negative), then this pair ...
... For each (distinct) pair of points in the set, compute a, b, and c to define the line ax + by = c. For each other point, plug its x and y coordinates into the expression ax + by – c. If, for all the other points (x,y), ax + by – c has the same sign (all positive or all negative), then this pair ...

Algorithm

In mathematics and computer science, an algorithm (/ˈælɡərɪðəm/ AL-gə-ri-dhəm) is a self-contained step-by-step set of operations to be performed. Algorithms exist that perform calculation, data processing, and automated reasoning.An algorithm is an effective method that can be expressed within a finite amount of space and time and in a well-defined formal language for calculating a function. Starting from an initial state and initial input (perhaps empty), the instructions describe a computation that, when executed, proceeds through a finite number of well-defined successive states, eventually producing ""output"" and terminating at a final ending state. The transition from one state to the next is not necessarily deterministic; some algorithms, known as randomized algorithms, incorporate random input.The concept of algorithm has existed for centuries, however a partial formalization of what would become the modern algorithm began with attempts to solve the Entscheidungsproblem (the ""decision problem"") posed by David Hilbert in 1928. Subsequent formalizations were framed as attempts to define ""effective calculability"" or ""effective method""; those formalizations included the Gödel–Herbrand–Kleene recursive functions of 1930, 1934 and 1935, Alonzo Church's lambda calculus of 1936, Emil Post's ""Formulation 1"" of 1936, and Alan Turing's Turing machines of 1936–7 and 1939. Giving a formal definition of algorithms, corresponding to the intuitive notion, remains a challenging problem.