Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Soil mechanics wikipedia , lookup
Mohr's circle wikipedia , lookup
Rolling resistance wikipedia , lookup
Centripetal force wikipedia , lookup
Contact mechanics wikipedia , lookup
Frictional contact mechanics wikipedia , lookup
Cauchy stress tensor wikipedia , lookup
Euler–Bernoulli beam theory wikipedia , lookup
Structural integrity and failure wikipedia , lookup
Stress (mechanics) wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Fracture mechanics wikipedia , lookup
Fatigue (material) wikipedia , lookup
Rubber elasticity wikipedia , lookup
Viscoplasticity wikipedia , lookup
Hooke's law wikipedia , lookup
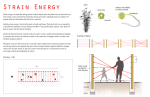
ELASTIC DEFORMATION AND POISSON'S RATIO 19 Background Unit: Elastic Deformation and Poisson's Ratio Introduction We're all aware that a very large force will produce a permanent, or irreversible, distortion of even a large piece of a strong material. The permanent distortion may be a bending which doesn't spring back when the force is removed or it may be fracture. Designers usually work to assure that their machines and structures aren't loaded by forces large enough to produce permanent distortion, but are loaded only within the range where the distortion "springs back" when the force is removed. We usually think of the forces causing deformation to be externally applied forces: forces such as the pressure force pressing on a piston's top within an engine or the traffic loads on a bridge or the snow loads on the roof of a mountain cabin. However, forces can be developed in many other ways: the load on a cable lowered into a deep oceanic canyon will be due mainly to the weight of the cable itself. Of course, the loads on transmission lines are due to the weight of the wire. Likewise most of the load on the bottom of the Golden Gate Bridge towers is from the weight of the bridge itself, not the traffic on the bridge. Other types of loading result from centrifugal forces (for example in a jet engine or steam turbine blade), from magnetic forces (on the windings and structure of large electromagnets. including those in large motors and generators), and from temperature differences within a piece of material causing unequal expansion (for example a coffee cup or a nuclear reactor pressure vessel). In this unit you will study how deformation is related to loading and how both are measured. Objectives After studying this unit and completing the lab assignment you should be able to perform the following tasks: 1. Write definitions for the following terms, including SI and English units when appropriate. a. tensile force b. elongation c. normal elastic strain d. normal stress e. elastic modulus 2. Given original and loaded dimensions of a rectangular or cylindrical rod, be able to calculate elongation and axial strain. Given strain and the loaded length, be able to calculate the unloaded length; given strain and the unloaded length, be able to calculate the loaded length. 3. Given an applied normal force and the dimensions of the part, calculate the stress on planes normal to the force. Also be able to work backward from the stress to the force or crosssectional area dimensions. 4. Use the definition of elastic modulus to solve problems involving simple elastic normal strains and stresses. 5. Write the equation defining Poisson's Ratio. Define each term in the Poisson's Ratio equation, indicate the sign of Poisson's Ratio and the maximum possible value for Poisson's Ratio. 6. Apply Poisson’s Ratio and the elastic modulus to problems involving normal stress and strain. 20 7. Discuss the principles of the wire strain gage including: a. a sketch of a simple strain gage b. an explanation of why the strain gage works (i.e. what properties of the gage material are responding to the strain) 8. With assistance of other students, obtain accurate measurements of the longitudinal and/or transverse strain as a function of load in a properly instrumented metal part which is uniaxially loaded in a universal testing machine. 9. Calculate Poisson’s ratio and the elastic modulus from a proper graph which you prepared from a set of load-longitudinal elastic strain-transverse elastic strain data and the initial specimen dimensions. Elastic Deformation Lo Deformation which “springs back” when the force is removed is called elastic deformation. Elastic deformation occurs as the interatomic bonds stretch when a load is applied; the atoms retain their original nearest neighbors and they “spring back” to their original positions when the load is removed. Fig. 1 shows an exaggerated view of the elastic deformation of a steel bar when the bar is subjected to an axial tensile (i.e. elongation or tension) force. We expect the tensile force to increase the length of the bar a small amount. This increase in length is called the elongation of the bar. Lo + ΔL F elongation = L – Lo = ΔL where: Lo = original (unloaded) length Figure 1 F L = final (loaded) length The deformation is usually "normalized" to the original length of the bar by dividing the elongation by the original length. The normalized elastic deformation is called the elastic strain. elastic strain = = ε = epsilon The units of elongation are length, so the units of strain are (length/length). Since the units cancel, strain is dimensionless. It doesn't matter if the measurements are made in inches/inch, meters/meter, or miles/mile, the strain will always be the same. You may find it helpful to write use units for strain although it is not necessary and is usually not done. 21 Lo The strains we considered above are ΔL often called normal strains because the force causing them is acting perpendicular to a plane of action. The normal strains are also found by dividing the displacement parallel to the action of the force, ΔL, by the distance between the applied forces, Lo. Another basic type of strain is possible: if the force causing the strain acts parallel to a plane of action (shear) the strain is a shear strain. Normal strains are usually denoted by the Greek letter epsilon (ε), while shear strains are denoted by the Greek letter gamma (γ). Shear strain is calculated by dividing the displacement parallel to the action of the force, ΔL , by the perpendicular distance F between the applied shears, Lo. (Fig. 2) For this lab we will concentrate on Figure 2 Before and After Shearing normal strains, although shear strains are very important. You will learn about shears and shear Front view of Cube, Edge Length = Lo strains in E 45 lecture, and in statics, mechanics of materials, structures, and machine design courses. Usually the forces acting on a body are normalized by dividing the force by the area of the surface it's acting on to get a "force intensity". The force intensity is called stress. Normal stresses are usually symbolized by the Greek letter sigma (σ) and shear stresses by the Greek letter tau (τ). normal stress = σ where: shear stress = τ F = applied force Ao = area over which the force is applied In the SI system, force has units of Newtons (N), so stress has units of Newtons/meter2, (N/m2). A stress or pressure of 1 N/m2 is called 1 Pascal (Pa). Pascals are very small so it is quite common to find data listed with units of MPa (MegaPascal = 106 x Pa) .In the English (British Engineering) system, force has units of pounds-force (1bf) so stress has units of lbf/in2, usually abbreviated psi. (Remember, a poundforce is the force exerted by the acceleration of gravity, 32.2 ft/s2, on a mass of 1 pound.) Often lbf/in2 x 103 is abbreviated ksi. Robert Hooke noted that doubling the load on a spring will double its extension. Hooke's Law is: F=kX where: F = force (pounds-force, lbf, or Newtons, N) X = extension (inches, in., or meters, m) k = spring constant (lbf /in. or N/m) Hooke’s Law describes linear elastic behavior. The extension (elongation) is directly proportional to the applied force. 22 F Many engineering materials are linearly elastic (most metals and alloys, ceramic materials, rigid plastics, but not soft plastics or rubbery materials). That means that the amount of strain exhibited by the material is proportional to the amount of stress applied since strain is related to extension and stress is related to applied force. The behavior of linearly elastic materials follows Hooke’s Law. Each type of material has a characteristic proportionality constant called the elastic modulus. For elastic deformation: normal stress = elastic modulus . strain σ=Ε.ε Since strain is dimensionless, the elastic modulus must have the same units as stress, i.e. N/m2 or psi. (The elastic modulus, E, is often called "Young's Modulus" and is also commonly abbreviated as a "Y".) In an analogous way, the constant of proportionality between shear strain and stress is G, the shear modulus, so: τ=G.γ Unlike most mechanical properties, the elastic constants (E and G) are independent of details of composition, material processing, or heat treatment because they are related to the interatomic bond strength. For example, virtually all aluminum alloys, regardless of how they were processed have an elastic modulus of 6.9 x 1010 N/m2. Plastic Deformation After a material has reached it's elastic limit, or yielded, further straining will result in permanent deformation. Plastic (or permanent) deformation will be examined further in the next laboratory unit. Stress-Strain Curves Many tests are used to study the mechanical behavior of materials, but none is more important than tension (tensile) or compression tests used to obtain stress- strain curves. The whole idea behind the tests is to obtain a series of strain values as the stress on a test specimen is increased. Most of the properties aren’t dependent on the specimen size. Experience shows that the elastic modulus is the same whether we use a tensile test or a compression test to find it. Since strain = ε the strain will be positive (greater than zero) for tensile testing and negative (less than zero) for compression testing. And since stress = σ = Εε consistency requires that a tensile stress be considered positive and a compressive stress be considered negative. Stress-strain curves are created by measuring the length of change of an appropriate test specimen as the load on the specimen is increased and plotting those data. The elongation values, 23 stress DL, divided by the original length, Lo, are the strains and the loads, F, divided by the original cross-sectional area, Ao, are the stresses. The stress-strain curve is found by plotting the stress values on the vertical axis (ordinate, usually the y-axis) and the strain values on the horizontal axis (abscissa, usually the x axis). Stress-strain curves for metals have the general shape shown in Fig. 3. The linear portion of the stress- strain curve indicates elastic, or recoverable deformation. The non-linear portion indicates plastic deformation. Plastic strain is defined as permanent, non-recoverable deformation. In this unit we will only investigate elastic behavior. Recall that the elastic modulus is defined by the relation: σ = Εε so by rearranging this equation we can write: strain Figure 3 This equation is valid only for the elastic portion of the curve, that is the linear region of the stress-strain curve. We can easily calculate the elastic modulus of a material by calculating the slope of the straight-line portion of the stress-strain curve. Elastic Straining in Directions Normal to the Applied Stress We are familiar with the contraction or thinning of a rubber band when it's stretched elastically, or with the drawing down of bread dough or taffy when it's pulled, so there can be a significant amount of deformation in a specimen perpendicular to the direction of loading. Isotropic is a term meaning that the material's properties are the same in every direction. The materials we are discussing are assumed to be isotropic; the elastic properties are independent of direction. This is a reasonable assumption because most engineering materials are made up of more or less randomly oriented grains so the isotropic case is the usual one encountered in engineering practice. (The anisotropic case is much more complicated.) When a piece of material is elastically loaded as shown in Fig. 4, the elastic strain parallel to the direction of loading (the axial strain) is given by: = εxx elastic strain = Here epsilon has been given the subscript “xx.” In the double subscript system for strains, the first subscript indicates the direction in which the strain is occurring and the second subscript indicates the direction of the stress causing the strain. Hence, exx means strain in the x direction caused by a stress in the x direction. 24 F Y Z X Lo L The definition of Poisson's Ratio is the key concept when working with strains in directions perpendicular to the applied force (often called the transverse, lateral, or diametral direction). Poisson's Ratio relates the strain in the direction perpendicular to the applied force (the transverse strain) to the axial strain. Poisson’s Ration = v (or μ) Do So in Fig. 4 Wo D W Figure 4 For isotropic materials V will always be positive since loading type F ________________sign__________________ εaxial εtransverse v tensile + _ + compressive _ + + Also, for isotropic materials we will get the same result for v no matter in which direction εtransverse is measured as long as it is measured perpendicular to εaxial. Volume Change Associated with Elastic Straining Consider the loaded dimensions of a round bar. If x represents the axial direction and d the diametral direction: therefore: loaded length = Lo + ΔL = Lo + Lo . εxx = Lo(1 + εxx) 25 And: therefore: loaded diameter = Do + ΔD = Do . εdx The original volume of the bar is, of course: And the final volume of the bar will be: Recalling that the original volume was: We can write the fractional volume change as the result of elastic straining as: so: This expression can be greatly simplified by the following argument: with the exception of rubber-like materials, the maximum elastic strain which an engineering material is likely to encounter is about 0.01 because the yield strengths seldom exceed 1% of the elastic moduli of the materials. Thus the terms in the above expression which involve (σx/E)3 or (σx /E)2 are only 10-4 to 10-2 as large as the terms involving (σx /E). So we can reasonably neglect the squared and cubed terms, recognizing that this limits our accuracy to about 2 significant figures. The result is: 26 The above result is also valid in general for isotropic materials since we assume there is no directional dependence in the transverse strain as long as is it measured perpendicular to the direction of the applied load. Biaxial Stresses Z 1 Y X σy σx Figure 5 Consider the plate shown in Fig. 5 which has tensile stresses sx and sy in the x and y directions respectively. Stress σx will tend to elongate the plate in the x direction and cause it to contract in the y and z directions, while σy will tend to elongate it in the y direction and contract it in the x and z directions. How can we analyze the combined effects of these stresses? Two principles help with this problem: they will be stated here and you will have an opportunity to apply them to a simple system in this exercise. (Hint: LEARN these principles. They are very important and useful to engineering design. You will study in more detail in advanced courses in mechanics of materials and design.) 27 1. Boltzmann's Superposition Principle: Elastic stresses act independently so the strains in each direction caused by each stress can be calculated independently. The total strain in any direction can then be found by merely summing all the strains in that direction caused by all the stresses. 2. The concept of principal axes and principal stresses: Regardless of the complexity of the pattern of normal and shear forces acting on an object, at each point in the object there is an orientation for an infinitesimal volume of material for which only compressive and tensile stresses are acting on the surfaces of the volume. That is, at each point in the material an orientation exists for an infinitesimal volume for which no shear stresses, but only normal stresses, act on the volume. The axes normal to the infinitesimal volume which is oriented so that no shear stresses are acting on it are the principal axes: the normal stresses acting on the volume along the principal axes are the principal stresses. The lack of shear stresses and the orthogonal orientation of the normal stresses acting on the body in Fig. 5 mean that the principal axes in this case will coincide with the x, y, and z axes. Let us now consider a unit volume located at a point such as “1” in Fig. 5, redrawn in Fig. 6: Z σy σy Y σx σx X Figure 6 εx = εxx + εxy where: and so: εy = εyx + εyy where: and where: and so: εz = εzx + εzy so: 28 Effective Stresses Yielding is defined as permanent deformation. The yield strength is the stress at onset of permanent deformation as measured in a tensile test. The yield strength determined in a tensile test will be directly useful to predict the load at yielding in an actual part only if that part is loaded in simple uniaxial tension or compression. If the part is loaded in complex ways by a number of normal and shear forces, as is the usual case, we can use the uniaxial tensile yield strength to predict yielding if we can determine the principal stresses at the most highly stressed location within the part. If σ1, σ2, and σ3 are the principal stresses, the following formula can be used to combine them to calculate a single effective stress, σ. Once we know s, we can compare it with σys, the yield strength from a tension test. If sys is greater than s yielding will not occur, but if sys is less than s yielding will occur. Principle of Strain Gage Operation The resistance of a wire of cross section A and length L made of a metal of resistivity r will be: Direction of strain If the wire is of rectangular cross section (width w and thickness t) then A = wt; if the wire is of circular cross section with radius ro, then A = π(ro)2. The resistance will increase if the wire is elastically stretched because L will increase and A will decrease. In addition to the resistance increase caused by the dimensional change there will be some change in the resistivity of the metal since the average space between the atoms will be slightly changed when it is elastically stretched. It is possible, therefore, to fasten a piece of thin wire or foil, to the surface of a part that is to be stressed, measure the change in resistance of the wire or foil as the part is stressed, and obtain an indication of the magnitude of the strain in the metal in the region directly under the wire. This is the principle of the strain gage. In order to make sure we are measuring the strain in as localized a manner as possible commercial strain gages are usually long wires that are folded back and forth (as in Fig. 7) and mounted in a small Figure 7 piece of polymer for easy attachment to the specimen. It is necessary to assure that the strain gage is bonded to the part so that it will strain with the part and it is also necessary to electrically insulate the strain gage from the part. Neither of these problems present much difficulty as long as the temperature is not above a few hundred degrees Fahrenheit. We need to have a calibration factor for the gage, the gage factor, to convert the electrical output to 29 strain. The gage factor is defined as the fractional change in resistance per unit strain: where: R(0) = resistance of the gage at zero strain R(ε) = resistance of the gage at Notice the gage factor is dimensionless (the units are ohm/ohm per inch/inch). For metals with a Poisson's ratio of 0.3. the gage factor would be 1.6 if the only factor contributing to the change in resistance of the gage was the dimensional change of the wire. Actual gage factors of metals commonly used in strain gages range from 2.0 to 3.5. with the most strain gages having gage factors of roughly 2. Measurement of Resistance Changes and Strain The simplest way of making a highly accurate measurement of the resistance change in the strain gage as it is elongated is to use a Wheatstone bridge circuit (Fig. 8). A At Balance: I4 I1 IG = 0 R4 IG R1 I4 = I3 I3 = I2 B G and R2 R3 I2 I3 C V Figure 8 30 The Wheatstone bridge is composed of a voltage source, four resistances arranged in two parallel paths, each path having two resistances, and a galvanometer connected between the two nodes which are not connected to the voltage source. In Fig. 8 the voltage source is connected to nodes “B” and “D” while the galvanometer is connected to nodes “A” and “C.” The galvanometer is just an extremely sensitive ammeter; when the galvanometer shows no deflection then IG, the current through the galvanometer is zero and the voltages at points A and C (relative to any reference, such as ground) must be the same. Rl is a strain gage, with R2, R3, and R4 being internal resistances within the strain indicator. Furthermore, R3 and R4 are variable resistors. With the specimen to which the gage is bonded in an unstressed state, the bridge can be "balanced" by adjusting R3 so that no current flows through the galvanometer. When the bridge is balanced we must necessarily have the conditions: VBA = VBC (voltage drop from B to A equals that from B to C) VAD = VCD (voltage drop from A to D equals that from C to D) Now we can use Ohm’s Law which says that the voltage drop V across a resistance R is equal to the product of the resistance and the current I flowing through the resistance. We can also note from Fig. 8 that as long as the bridge is balanced IG = 0; current I1 will flow through R1 and R4 while current I2 will flow through R2 and R3. So we can use the voltage relationships above and Ohm Is Law to write: I1Rl = I2R2 I1R4 = I2R3 By taking the ratio of the two equations above we can write the condition for balance in the Wheatstone bridge as: or If the part to which the strain gage Rl is bonded is strained, R1 will experience the same strain and the resistance of Rl will increase throwing the bridge out of balance. When the bridge is out of balance the result is current flow through the galvanometer. From above, the bridge can be rebalanced by increasing R4. In practice, the strain gage Rl is connected to a Wheatstone bridge which is in an instrument called a strain indicator. The strain indicator is calibrated to read strain directly in micro-strain (strain x 10-6) rather than in resistance units (ohms). A separate adjustment on the strain indicator compensates for the gage factor and must be set to correspond to the gage factor of the particular strain gage being used. Some strain indicators indicate zero strain in the initial unstressed condition; successive readings with these instruments give strain readings directly. Other strain indicators give a non-zero initial reading which must be 31 subtracted from each of the subsequent readings to get the actual strain values relative to the initial unstrained condition. Temperature and Transverse Strain Effects If we cement a strain gage to a test piece at room temperature, then warm the test piece (but without stressing it) would you expect the strain gage to indicate a strain in the material? You probably would answer something like, 'Well, let's see...if the gage metal has a lower coefficient of thermal expansion than the test piece, then the test piece would expand more than the gage. So the test piece would be pulling on the gage, and the gage would indicate a tensile strain in the test piece even though no stress is applied." Handbooks on experimental stress analysis give lots of details about various ways of compensating for temperature. It's sufficient to note here that the strain gage manufacturers have used some tricky metallurgy to produce their gages with a whole range of thermal expansion coefficients. If we need a gage to put on an aluminum part, we buy the gages with a thermal expansion coefficient to match aluminum's; likewise, if we are measuring strains in a forged steel connecting rod, we buy a gage with the same thermal expansion coefficient as the steel. In this laboratory you are exploring elastic strains perpendicular to the applied stress. What about the same kind of strains in strain gages? That is, how sensitive are strain gages to the stresses perpendicular to the direction of the gage windings? Usually, the "transverse sensitivity" of gages can be neglected, although in exacting cases a correction must be made. Young's Modulus and Poisson's Ratio The elastic behavior of engineering materials can normally be characterized by the following four engineering elastic constants: units Elastic (Young’s) Modulus, psi (N / m2) Poisson’s Ratio, dimensionless Bulk Modulus, psi (N / m2) Shear Modulus, psi (N / m2) In this experiment you will measure the elastic modulus and Poisson’s ratio of a common engineering material, quenched and tempered 4140 steel. This steel is commonly used for hardened steel parts such as heavy duty shafts, heavy crankshafts, steering knuckles, etc. The heat treatment which was given to the specimen was: heated to between 1500°F and 1550°F for 1 hour, quenched in oil with stirring, then reheated (tempered or drawn) to 530°F for 1 hour. 32 Measurement of the elastic modulus and Poisson's ratio allows calculation of the other two engineering elastic constants by one of these formulas: = Shear Modulus (or Modulus of Rigidity) = Bulk Modulus You won't usually find the above values tabulated; handbook authors frequently tabulate only E and v values because they assume you know about the above relationships for G and B. The elastic constants of engineering materials are of critical importance in design. In general, the elastic constants of crystalline materials (metals, ceramics, some polymers) are not affected significantly by thermal or mechanical treatments. The elastic modulus and Poisson’s ratio are the same regardless of whether the axial stress is tensile or compressive. Elastic behavior is discussed in more detail in your text. Bibliography 1. American Society for Testing and Materials, ASTM Standard E 111, “Determination of Young's Modulus at Room Temperature.” 2. ASTM Standard E132, “Determination of Poisson's Ratio at Room Temperature.” 3. ASTM Standard E251, “Performance Characteristics of Bonded Resistance Strain Gages.” 4. H.K.P. Neubert, Strain Gages, Kinds and Uses. St. Martin's Press, New York, 1967. 5. C.C. Perry and H.R. Lissner, The Strain Gage Primer. 2nd ed., McGraw-Hill, New York, 1962. 6. James W. Daly and William F. Riley, Experimental Stress Analysis, 2nd ed., McGraw-Hill, New York, 1978. 33 Laboratory Unit: Elastic Strain and Poisson's Ratio Introduction In this unit you will learn to use electrical strain gages to monitor the transverse and longitudinal strains of a steel specimen under tensile loads and from these data determine the Poisson’s ratio of the steel. Tensile Test Materials and Equipment 1. Tensile test specimen with two strain gages attached. One strain gage is aligned parallel to the specimen's loading axis and the other is perpendicular to the loading axis. 2. Strain indicator (Wheatstone bridge). 3. Switch and balance unit. 4. Micrometer and scale. Testing Procedure 1. Check the dimensions of the test specimen using a micrometer and scale and calculate the cross-sectional area. 2. The specimen will be installed in the universal testing machine and should be connected to a switch and balance unit and strain indicator assembly. Follow operating instructions on the inside cover to the strain indicator, except for the balancing instruction. Instead of balancing the bridge in the unstressed state using the balance knob on the strain indicator, switch the channel selector on the switch and balance unit to one of the wired channels and balance the bridge using the balance knob for that specific channel. Switch the selector to the second wired channel and balance the bridge with the balance knob for that channel. 3. Have your instructor check your set-up before proceeding. 4. Load the sample in a series of steps to the maximum allowable load (you determine this – make sure you select a load that is below the yield strength of the material). Select at least 25 evenly spaced load intervals so that the intervals will be "nice round numbers" that are easy to identify on the UTM load dial. In this experiment the loading must actually be stopped at each desired load increment to allow both the transverse and longitudinal strain to be read. Record the load, transverse strain and longitudinal strain at each step. 5. After reaching the maximum load, record a series of data at about 5 load values while unloading. Again, choose the load values so that they will be easily identifiable on the UTM dial. Be sure to record the final strain readings at zero load. 34 Cantilever Beam Materials and Equipment 1. Cantilever beam specimen with strain gages attached, top and bottom. 2. Strain recording device. 3. Micrometer and scale. Testing Procedure 1. Check the dimensions of the specimen using an appropriate measuring device. Determine the distance to the applied load(s), and the locations of the strain gages. 2. Attach the strain gages to the strain recording device. Make sure the device is zeroed properly so that each strain gage reads zero when there is no load applied. 3. Apply the load(s) to the beam and record the strains at the locations indicated. 4. Remove the load(s) from the beam and record the strain values. The stress at any point on the cantilever beam can be calculated by using the following formula (you will derive and study this in detail in Mechanics of Materials): c c where: M = moment of the force = F . d (N m, lbf in. or lbf ft) (F = force, d = distance) Figure 9 C = distance from the neutral axis at the centroid of the beam (Fig. 9) (m, in., or ft) h I = moment of inertia = (m4, in4, or ft4) b Figure 10 (b and h determined as in Fig. 10) At any point along the beam there will be a linear stress distribution from the top of the beam to the bottom. The stress will be zero at the centroid, maximum in tension at the top, and maximum in compression at the bottom. This is a normal stress, and since this deformation is elastic the strains can be estimated by relating these stresses to strain with the elastic modulus, σ = εE. The moment of force, M, varies linearly from the point of the applied load to the support. In the case of one load applied at the end of the beam, M will be zero at the loaded end of the beam and maximum at the support, where M = F . L, the applied force times the beam length. 35 The maximum deflection in a cantilever beam (at the end of the beam) with one load applied at the end of the beam (Fig. 11) can be determined by evaluating the following formula (from Mechanics of Materials): P L where: P = load (N or lbf) y L = length (m, in., or ft) Figure 11 2 E = modulus of elasticity (N/m , or psi) I = moment of inertia (m4, in4, or ft4) If the loading is more complicated, i.e. there is more than one applied load, the law of superposition can be used to determine the maximum deflection; the resultant deflection from a combination of loads is the sum of the deflection from each individual load. If there is a load applied at the end of the beam and a load applied somewhere between the support and the end, the maximum deflection is the sum of the deflections from each individual load. The formula above is used to determine the maximum deflection when the load is applied at the end of the beam, and the following formula can be used to determine the maximum deflection if the load is applied between the support and the end of the beam (Fig. 12). where: P = load (N or lbf) x x = distance from support to applied load (m, in., or ft) L-x y L = length of the beam (m, in., or ft) Figure 12 2 E = modulus of elasticity (N/m , or psi) I = moment of inertia (m4, in4, or ft4) By applying superposition, the maximum deflection at the end of a cantilever beam of length, L, with two loads applied, P1 applied at the end of the beam, and P2 applied at a distance b from the support (between the support and the end of the beam) (Fig. 13) is: P2 P1 x L-x where E is the modulus of elasticity and I is the moment of inertia. ytotal Figure 13 36