Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Eigenstate thermalization hypothesis wikipedia , lookup
Classical mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Fictitious force wikipedia , lookup
Hunting oscillation wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Equations of motion wikipedia , lookup
Hooke's law wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Newton's laws of motion wikipedia , lookup
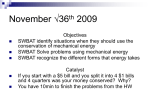
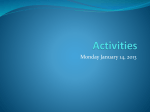
Chapter 2 OSCILLATIONS Topic Oscillatory Motion Simulations Bungee jumps and bridge swings m-script bridge_swing.m We our surrounded by a world of oscillations. Our heart pumps to a regular rhythm; the air vibrates when we talk; we can see because light waves are oscillating electric fields they stimulate the receptors on the retina. We enjoy listing to music; the strings vibrate on a guitar when plucked; the air vibrates when you play a trumpet and the membrane of a drum vibrates when struck. To start the study of oscillations we will consider an object of mass m attached to a spring with a stiffness k . The object can be displaced from its equilibrium and set to oscillate freely or it can be forced to oscillate by some mechanical means. As the object oscillates it can dissipate energy to the surroundings. This dissipation of energy is called damping. The equation of motion for our object confined to oscillate along the x-axis is derived from Newton’s Second Law. We will assume that the elastic limit of the spring is never exceeded. The forces acting of the object are the elastic restoring Fe forces, the damping force Fb responsible for the energy dissipation and the driving force Fd which imparts energy to the oscillating object. We will assume the elastic restoring force is given by Hok’s law and a velocity dependence for that damping force and consider the driving force to be sinusoidal (harmonic) and given by a step function. The equation of motion is given by (1) m a(t ) k x(t ) bv(t ) Fd (t ) where x(t) is the displacement from the equilibrium position (x = 0). The numerical procedure adopted, is based on a half-step method and the smaller the time interval t used the better the approximations. From the definitions of velocity and acceleration, at any time, t we have (2) v (t ) x (t t / 2) x (t t / 2) t /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 1 (3) a (t ) x (t t ) 2 x (t ) x (t t ) t 2 Therefore, the displacement of the object at time (t + t) can be calculated directly from the displacement at the two previous time steps, t and (t - t) (4) x(t t ) c1 x(t ) c2 x(t t ) c3 Fd where the constants c1, c2 and c3 are given by b t c0 1 2m 2 k t 2 / m c1 c0 b t / 2m 1 t 2 / m c2 c3 c0 c0 Simple Harmonic Motion For the case of simple harmonic motion, the damping and the driving force are zero and for damped harmonic motion only the driving force is zero. /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 2 Ther /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 3 Simulation 2.1 Bungee jumps and bridge swings Inspect and run the m-script bridge_swing.m so that you are familiar with what the program and the code does. The m-script calls the function eq_quadratic.m. A bungee jump is when a person plummets off some high structure such as a tower, bridge, crane or hot air balloon. A version of the bungee jump is the bridge swing. A bungee cord is connected to one side of a bridge and the other end to the jumper in an abseiling harness on the other side of the bridge. Bungee cords are soft and springy and may stretch to more than three times there natural length. Most jumps occur without any mishap, however, there have been many serious injuries and deaths, and in some countries bungee jumping is illegal. Accidents can be traced to human error such as improper attachment of the body harness to the jumper and others to the poor understanding of the physics where there has been a mismatch between the mass of jumper, height of jump and bungee cord selected for the jump. Simple models based upon Newton’s Second Law (equation of motion) can be used to give an insight into the physics of bungee jumping and to give estimates of jump drop, maximum speed, acceleration, forces and energies during a jump. A two dimensional model is used for the simulations of bungee jumps and bridge swings. The coordinate system is one in which the +y-axis is vertical up and the +x-axis is horizontal to the right. The origin (0,0) is the point of attachment of the bungee cord to some structure. The jumper is assumed to be a point particle of mass m and during the jump, the forces acting on the jumper are the gravitational force FG , the elastic restoring force due to the extension of the bungee cord, FE and a dissipative force, FD due to friction and drag forces acting on and within the cord and on the jumper. The equation of motion for the jumper is (1) F F (2) r L e x2 y2 . FE FD ma where a is the acceleration of the jumper and the position of the jumper has coordinates (x, y). The natural length of the bungee cord is L, the extension of the cord, e and extended length of the cord, r G The bungee cord acts like a weak spring with a stiffness that decreases with extension (Menz, 1993). A two-piece linear model is used to describe the stiffness of the bungee cord; the stiffness is k1 when the extension is less than e1 and k2 for extension greater than e1 where k1 > k2. The elastic restoring force when the cord is stretched is given by (3a) 0 e e1 (3b) e e1 FE k1 e FE k2 e k1 k2 e1 /books/simulations/ch2_osc_waves.doc (k1 constant) (k1, k2 constant) . Sunday, June 18, 2017 4 The dissipative force is assumed to depend upon the both the velocity and the square of the velocity of the jumper. The x and y components of the forces acting on the jumper are given in equation (3) (4a) FGx 0 (4b) FEx FE (4c) FDx D1vx D2vx v FGy m g x r FEy FE y r FDy D1v y D2v y v where D1 and D2 are constants for the dissipative force and the elastic restoring force, FE is given by equation (3). The x and y components for the acceleration of the jumper are then (4a) ax FGx FEx FDx m and ay F Gy FEy FDy m . A simple numerical method is used to calculate the velocity and displacement from the acceleration at successive time steps given a set of initial conditions. The method outlined is not the most accurate method but one in which is easy to implement. If the values of x(t), y(t), vx(t), vy(t), ax(t) and ay(t) are known at time t then the values at time t + t are (5a) v x (t t ) v x (t ) a x (t ) t x(t t ) x (t ) v x (t ) t 0.5 a x (t )t 2 (5b) v y (t t ) v y (t ) a y (t ) t y(t t ) y(t ) v y (t ) t 0.5 a y (t )t 2 . Once the acceleration, velocity and displacement are known, it is a simple matter to calculate forces and energy. The kinetic energy of the jumper, K, the elastic potential energy, UE, the gravitational potential energy, UG and the total mechanical energy, E are given in equation (6). The zero for the gravitational potential energy is chosen to be at y = 0. K 12 m v 2 (6a) (6b) (6c) (6d) UG m g L e 0 e e1 U E 12 k1 e 2 e e1 U E 12 k2 e 2 k1 k2 e1 e 12 k1 k2 e12 E K U E UG . /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 5 If the dissipative force is taken as zero, the total mechanical energy is conserved. From the principle of conservation of energy in this situation, we can predict the maximum free fall velocity, vff and the maximum distance the jumper falls vertically (jump drop), hdrop. the total energy at three instances for a bungee jump are (7a) start of jump E1 K1 U E1 UG1 0 0 0 (7b) end of free fall E2 K 2 U E 2 U G 2 12 m vffmax 2 0 m g L (7c) bottom of jump E3 K3 U E 3 UG3 0 U E 3 m g L emax . From equations (7a) and (7b), the maximum free fall velocity is (8) v ff 2 g L Equating equations (7a) and (7c) gives a quadratic equation for the maximum extension, emax and which can be solved to give the maximum extension of the bungee cord and the drop height, hdrop (9a) 2 1 emax 2 k1 k2 e1 mg emax k1 k2 e12 2 m g L 0 k2 k2 (9b) hdrop L emax . One has to be wary in using numerical method because you are not always confident that the results are accurate. The approximation method used in this simulations only gives reasonable results when the time increment is very small so that during any time step the acceleration does not change very much. When the time step is too large, the total mechanical energy often increases rather than stay constant. Where possible you should compare your numerical results with values calculated using analytical methods. If there is disagreement, then the time step used in the numerical procedure can be decreased or it may be necessary to use a more accurate numerical method. Table 1 gives a set of possible ranges for the parameters describing a jump. Variable mass of jumper natural length of bungee cord stiffness of bungee cord: stiff cord stiffness of bungee cord: medium cord stiffness of bungee cord: /books/simulations/ch2_osc_waves.doc Symbol m L k1 k2 k1 k2 k1 Value 50 to 150 6 to 20 ~ 250 ~ 150 ~ 200 ~ 110 ~ 160 Sunday, June 18, 2017 Unit kg m N.m-1 N.m-1 N.m-1 6 soft cord stiffness of bungee cord max tensile strength of bungee cord elongation factor dissipation factor dissipation factor bridge swing: starting x coordinate Table 1: Jump parameters /books/simulations/ch2_osc_waves.doc k2 e1 Smax e/L D1 D2 x(0) ~ 80 4 to 6 ~ 2.0104 2 to 4 0 to 10 0 to 10 0 to - 10 Sunday, June 18, 2017 m N N.m-1.s-1 N.m-2.s-2 m 7 Sample results: bridge_swing.m Bungee Jump Input parameters Initial x coordinate of jumper, xs = 0.00 m Initial y coordinate of jumper, ys = 0.00 m Mass of jumper, m = 100.00 kg Natural length of bungee cord, L = 9.00 m Dissipative force constant, D_1 = 0.00 N.m^-1,s^-1 Dissipative force constant, D_2 = 0.00 N.m^-2,s^-2 stiffness, k_1 = 200.00 N.m^1 stiffness, k_2 = 200.00 N.m^1 stiffness: two piece linear transition, e_1 = 0.00 m Analytical & numerical predictions A: max free fall velocity, v_ff = 13.28 m/s N: max free fall velocity, v_ff = 13.28 m/s A: drop height, h_drop = 24.49 m N: drop height, h_drop = 24.51 m Output parameters max velcoity, v_max = 15.01 m.s-1 max velcoity, v_max = 54.03 km.h-1 max acceleration, a_max / g = 2.17 max force on jumper, F_max = 2122 N max elastic restoring force by bungee cord, F_E_max = 3102 N 1 position x (m) 0 0 -0.5 -1 -10 -20 5 10 15 time t (s) 20 25 0 5 10 15 time t (s) 20 25 0 -10 -20 -30 -10 -5 0 x position (m) 5 10 15 2.5 5000 0 -5000 4000 2000 0 5 0 10 5 0 15 time t (s) 10 5 10 20 15 time t (s) 20 15 time t (s) x 10 4 2 K U 1.5 U 1 E G 25 25 20 25 energy (J) 0 Fynet (N) 4 2 0 Fe (N) a/g -15 E 0.5 0 -0.5 -1 -1.5 4000 Fe (N) 0 10 -15 position y (m) y position (m) -5 0.5 2000 -2 0 -2.5 0 2 4 6 8 10 extension, e (m) 12 14 16 /books/simulations/ch2_osc_waves.doc 0 5 10 15 time t (s) Sunday, June 18, 2017 20 25 8 Bridge Swing Input parameters Initial x coordinate of jumper, xs = -5.00 m Initial y coordinate of jumper, ys = 0.00 m Mass of jumper, m = 100.00 kg Natural length of bungee cord, L = 9.00 m Dissipative force constant, D_1 = 4.00 N.m^-1,s^-1 Dissipative force constant, D_2 = 4.00 N.m^-2,s^-2 stiffness, k_1 = 200.00 N.m^1 stiffness, k_2 = 110.00 N.m^1 stiffness: two piece linear transition, e_1 = 5.00 m Analytical & numerical predictions A: max free fall velocity, v_ff = 13.28 m/s N: max free fall velocity, v_ff = 10.34 m/s A: drop height, h_drop = 28.10 m N: drop height, h_drop = 21.29 m Output parameters max velcoity, v_max = 11.02 m.s-1 max velcoity, v_max = 39.69 km.h-1 max acceleration, a_max / g = 1.00 max force on jumper, F_max = 980 N max elastic restoring force by bungee cord, F_E_max = 1805 N 5 position x (m) 0 -2 -4 -8 -5 -12 -16 -18 -20 0 x position (m) 5 5 0 10 5 0 15 time t (s) 10 5 10 20 15 time t (s) 20 25 0 5 10 15 time t (s) 20 25 x 10 4 K U 1 25 G U E 0.5 15 time t (s) 20 15 time t (s) 20 25 energy (J) a/g Fynet (N) Fe (N) 2000 1000 0 10 -20 1.5 1000 0 -1000 5 -10 -30 -5 0 0 0 -14 1 0.5 0 0 -10 position y (m) y position (m) -6 E 0 -0.5 -1 25 -1.5 Fe (N) 2000 -2 1000 0 0 2 4 6 8 extension, e (m) 10 12 14 /books/simulations/ch2_osc_waves.doc -2.5 0 5 10 15 time t (s) Sunday, June 18, 2017 20 25 9 Investigations and Questions Simulate a bungee jump (start: xs = 0, ys = 0) with a zero dissipation force. 1.1 Vary the number of time steps, nt. What is the minimum value for nt so that the total mechanical energy, E is conserved. How well do the analytical and numerical predictions agree? 1.2 Explain the shapes of the position, force and energy graphs. Comment on when values of position, force, energy are a maximum, minimum or zero. 1.3 For a typical bungee jump, is the acceleration experience by the jumper excessive? (A person can blackout when their acceleration greater than about 5g’s). 1.4 Is it likely that a bungee cord will snap? (The maximum tensile strength of a bungee cord is ~2.0104 N.) 1.5 How does the vertical distance fallen by the jumper (jump drop), hdrop, depend upon the mass of the jumper, m? Repeat the simulation with increasing mass and tabulate the jump drop. 1.6 What are the differences in jump drops for bungee cords of varying stiffness. Consider stiff, medium and soft bungee cords. 1.7 Simulate a bungee jump with a non-zero dissipative force. How does this change the motion of the jumper? Adjust the value of the constants D1 and D2 to simulate as close as possible a real jump. 1.8 What is the mostly likely reason a person could suffer a serve accident assuming there where no attachment problems associated with the harness and cord? 1.9 If the stiffness of the bungee cord obeys Hooke’s law in extension (e1 = 0 and k1 = k2), how does it affect the jump drop. Is this significant? Simulate a bridge swing with zero and non-zero dissipative forces. Check that the time step is small enough so that the total energy is conserved and that the numerical and analytical values agree. 1.10 Explain the shapes of the position, force and energy graphs. Comment on when values of position, force, energy are a maximum, minimum or zero. The figure for the trajectory shows the position of the jump at fixed time intervals like in a strobe photograph, hence comment on the velocity of the jumper during the swing. 1.11 You can make your own bungee cord by using a length of latex tubing or by stringing together many elastic bands. Use you home-made bungee cord with an object attached to one end to carry out a bridge swing. How does the trajectory of /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 10 your bride swing compare with the computer model? You can change the parameters in the simulation to match those in your bungee swing using your home made cord. 1.12 Design a jump so that the maximum velocity of the jumper exceeds 80 km.h-1. What is the corresponding jump drop? References Menz, P.G.,, The Physics of Bungee Jumping, The Physics Teachers, Vol. 31, No. 8, November 1993. /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 11 Miscellaneous /books/simulations/ch2_osc_waves.doc Sunday, June 18, 2017 12