Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Stray voltage wikipedia , lookup
Audio power wikipedia , lookup
Spectral density wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Voltage optimisation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Dynamic range compression wikipedia , lookup
Alternating current wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Oscilloscope types wikipedia , lookup
Television standards conversion wikipedia , lookup
Mains electricity wikipedia , lookup
Power inverter wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Schmitt trigger wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Buck converter wikipedia , lookup
Integrating ADC wikipedia , lookup
An Asynchronous Delta-Sigma Converter
Implementation
Dazhi Wei, Student Member IEEE, Vaibhav Garg, Student Member IEEE and John G. Harris, Member IEEE
Department of Electrical and Computer Engineering, University of Florida,Gainesville
Email: {dazhiwei, vaibhavg, jgharris} @ufl.edu
Abstract— In this paper an architecture, signal reconstruction
algorithm and first-ever implementation of an asynchronous
delta-sigma converter are presented. The signal reconstruction
algorithm can mathematically perfectly reconstruct the original
signal only using timing events. A prototype circuit designed and
fabricated in a standard 0.5 µm CMOS process with a 5V power
supply is presented. The tests show that an 8-bit resolution with
6kHz signal bandwidth and only 715 µm power consumption is
possible.
I. I NTRODUCTION
There is great interest in reducing the power and/or increasing the speed of delta-sigma analog-to-digital converters
(ADCs). Continuous-time delta-sigma modulation is one avenue to increase converter speed by using a continuous-time
integrator but keeping the clocked quantizer [1]. Alternatively
Allier et al have designed a new class of asynchronous ADCs
based on level crossing sampling and time quantization [2]
but do not present a reconstruction algorithm to convert non
uniformly sampled sequences to uniformly sampled sequences.
Asynchronous delta-sigma converters which means converters
without clocks of any kind [3], [4] on the other hand,
have promise for ultra-low power consumption because of the
extreme simplicity of the required analog circuitry without any
oversampling requirements.
x(t )
y (ti )
Vdd
gm
dt
C ³
0
Vrl
Vrh
Integrator
Schmidt trigger
a
-a
high
low
1-bit DAC
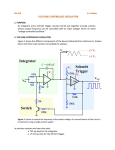
Fig. 1.
Architecture of the asynchronous delta-sigma converter
Figure 1 shows the architecture of a typical asynchronous
delta-sigma converter based on the scheme proposed by Lazar
and Toth [4].This architecture does not use a clock to sample
the analog signal, and no quantization operation is involved
during the data conversion. The difference between the input
signal x(t) and the fedback analog value corresponding to
the Schmitt trigger output y(ti ) is continuously integrated.
The Schmitt trigger output y(ti ) switches from low to high
if the integrator output rises above the high reference voltage
Vrh , switches from high to low if the integrator output drops
below the low reference voltage Vrl , and otherwise remains
unchanged. If there are no nonidealities during the data
conversion, the information in the analog signal is losslessly
encoded in the transition timings ti of the Schmitt trigger
output. The asynchronous converter described here requires
no oversampling in principle, however a small amount of
oversampling increases the signal to noise ratio (SNR) in
practice.
II. S IGNAL R ECONSTRUCTION A LGORITHM
The Schmitt trigger output is discrete in amplitude and
continuous in time and necessitates time quantization to obtain
digital output. Moreover, since most current digital systems
can only process uniformly sampled data, the nonuniform
nature of the Schmitt trigger output requires another signal
processing block to convert to a uniformly sampled sequence
for subsequent digital processing. The overall ADC performance is not only dependent on the accuracy of the encoding
circuit, but also on the efficiency of the signal reconstruction
block. We have implemented a variation of the reconstruction
algorithm proposed by Lazar and Toth [4] which has roots
in mathematical frame theory [5]. We have also applied our
algorithm to reconstruct signals from a variety of hardware
spiking neuron models [6]. We assume the input signal x(t) is
bandlimited to [−Ωs , Ωs ], and therefore can be expressed as
a sum of weighted Sinc functions:
sin(Ωs (t − sj ))
(1)
wj
x(t) =
Ωs (t − sj )
j
if the maximum interval between adjacent sj is less than the
Nyquist period π/Ωs . Here wj is the scalar weight of the Sinc
function at time sj .
The encoding operation of the converter can be summarized
as
ti+2
x(t)dt = (−1)i a(2ti+1 − ti+2 − ti )
(2)
ti
We can substitute Equation 1 into Equation 2, and obtain a
system of linear equations
wj cij = (−1)i a(2ti+1 − ti+2 − ti )
(3)
j
where coefficients
cij =
ti+2
ti
sin(Ωs (t − sj ))
dt
Ωs (t − sj )
(4)
Vdd
Vb1
M9
M5
M11
M10
M10
M3
M0
M4
M7
M2
M1
Vb0
Vin+
M3
M12
M14
Vref
Vin
Vout
VCM a
Vdd
Vb1
M8
Vin-
Schmitt trigger
output
Vb2
M6
M4
M5
DAC
output
M0
M2
Vb
M11
M1
M12
C
M13
M14
M8
M6
M7
Gnd
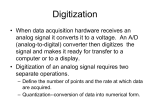
Fig. 2.
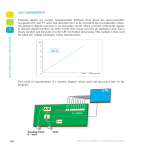
Fig. 3.
are constants depending only on the transition timings ti , and
sj = (tj + tj+2 )/2 . Finally we solve Equation 3 to obtain the
weights wj , and then use Equation 1 to reconstruct the signal
x(t). From Equation 3 we can see that the reconstructed signal
is only dependent on the DAC output a and the Schmitt trigger
output transition timings ti and is immune to process variation
or other device parameters such as Gm , C, and (Vrh − Vrl ).
The sufficient condition to meet the bandwidth requirement
in Equation 1 is that the maximum interval between adjacent
timings sj and sj+1 , or equivalently between adjacent transition timings ti and ti+1 , is less than π/Ωs . We can show that
the condition for all signals which requires that the magnitude
of signal x(t) be bounded by
C(Vrh − Vrl )Ωs
πGm
M13
Gnd
Circuit Implementation of Integrator
|x(t)| ≤ a −
M9
(5)
III. CIRCUIT IMPLEMENTATION
A. Integrator
The integrator shown in Figure 2 is implemented with a
transconductance amplifier Gm [7] with a capacitive load C.
Two PMOS transistors M5 and M6 working in the triode
region provide a conductance with a wide linear region. Since
transistors M1 and M2 have smaller W/L ratios compared to
the load transistors M3 and M4 and the corresponding voltage
gain gm1/gm3 is less than one, the linear input region of
the integrator is further increased. A larger linear input region
is critical since it means larger allowable signal power with
decreased high-order harmonic distortions introduced in the
signal band. However this decrease in harmonic distortion is
at the cost of more input referred noise. Therefore transistor
sizes must be chosen carefully to make the tradeoff between
linearity and
The transconductance can be written as
noise.
µn (W/L)1
Gm = 4β5 2IβB1
µp (W/L)3 , and can be tuned via the bias
7
current IB1 after fabrication.
B. Schmitt Trigger
The circuit implementations of a novel Schmitt trigger and
the 1-bit DAC are shown in Figure 3. The Schmitt trigger is
M15
VCM a
Circuit of the Schmitt trigger (M0-13) and the 1-bit DAC (M14-15)
very simple and does not require any resistors. The second differential input pair (M0-3) is introduced to a transconductance
amplifier (M4-13) to form the positive feedback that provides
hysteresis. The inverter (M12-13) is needed to increase the
loop gain and to produce the digital output. It turns out Ib1 has
to be larger than Ib2 for proper operation. The Schmitt trigger
works as follows. Assuming initially the output Vout is low and
the input Vin is much lower than the reference Vref , transistors
M1 and M5 are off and transistors M2 and M4 are on. Current
Ib1 flows through M4 and the current Ib2 through M2 and thus
Ib1 + Ib2 flows through M6 while no current flows through
transistors M1, M5 and M7, and the output Vout is kept low.
If Vin decreases it will not change the current flow and thus not
affect this state. If Vin increases, current begins to switch from
M4 to M5, and thus current through M6 increases and current
through M7 decreases. Once the currents through M6 and M7
are both equal to (Ib1 + Ib2 )/2, an increase in Vin will cause
more current to flow through M7 than M6, and thus cause
the output Vout to increase. Meanwhile the increase of Vout
will also switch more current from M2 to M1, which further
causes more current to flow through M7 than M6. A positive
feedback mechanism is activated and Vout is exponentially
increased from low to high. Similar analysis can be applied
to the case of switching Vout from high to low. It turns out
that the high and low reference voltages are the input voltages
which cause the current through M4 to equal (Ib1 − Ib2 )/2
and (Ib1 + Ib2 )/2 respectively. For above-threshold square-law
operation we can obtain the reference voltage swing vrh − vrl
as
√
√
2( Ib1 + Ib2 − Ib1 − Ib2 )
(6)
Vrh − Vrl =
µCox (W/L)4
which can be tuned via bias currents after fabrication. We can
also derive the transconductance of the Schmitt trigger at the
switching points as
gm
=
2
1/gm4 + 1/gm6
1
(Ib1 −Ib2 )µCox (W/L)4
2 − I2
2 Ib1
b2
√
2
+√
√
√
µCox (W/L)4
(7)
Ib1 + Ib2 + Ib1 − Ib2
The 1-bit DAC is just a simple inverter with sources connected to appropriate analog voltages VCM + a and VCM − a.
VCM is the common mode voltage and a is half of the full
scale analog voltage, which are determined by the input linear
region of the integrator.
=
60
1
(Ib1 +Ib2 )µCox (W/L)4
50
40
SNR (dB)
=
30
20
10
C. Non Idealities and Tradeoffs
The signal reconstruction algorithm discussed in section II
assumed that the integrator is ideal. However in practice the
amplifier has finite output resistance which results in a leaky
integrator and we must consider its effect in the reconstruction.
Assuming the output resistance of the amplifier is R, the
integration operation is described by
Vo
Vo
dVo
= Gm Vi −
= Gm (Vi −
)
(8)
dt
R
ADC
where ADC = Gm R is the DC voltage gain of the transconductance amplifier and Vo and Vi are output and input voltages
respectively. The last term in Eq. 8 represents the non ideality
and we need to give guidelines on how to minimize its
effect on the output. Mathematically we can achieve perfect
reconstruction for the converter with the leaky integrator if
all the parameters a, R, and C and transition timings ti are
known using
ti+1 −ti+2
ti −ti+1
wj cij = (−1)i aRC(e RC
− e RC )
(9)
C
j
where cofficients
ti+1
sin(Ωs (t − sj )) t−ti+1
e RC dt+
cij =
Ωs (t − sj )
t
i
ti+2
sin(Ωs (t − sj )) t−ti+2
e RC dt
Ωs (t − sj )
ti+1
(10)
are constants depending only on the transition timings ti , and
sj = (tj + tj+2 )/2. However in practice the output resistance
R is usually a signal and process dependent term ro = 1/λI
and exhibits some nonlinearity and unpredictability, moreover,
the algorithm is sensitive to the estimated value of the output
resistance, therefore it is difficult to have satisfactory reconstruction using Eq. 9 and 10. However we may consider the
leaky term −Vo /ADC in Eq. 8 as input referred noise whose
variance degrades the reconstruction performance. So, from
Eq. 8 we see that higher output voltage swing(V0 ) and lower
DC gain(ADC ) would increase noise power and therefore
degrade performance. By adjusting the DC gain and output
voltage swing we can estimate the desired noise power and
hence the signal to noise ratio.
The Schmitt trigger is a critical component to perform
the sampling operation of the converter. A larger reference
voltage swing vrh − vrl is usually preferable since essentially
the performance is determined by the value of vrh − vrl
divided by reference variations caused by nonidealities such as
0
-60
-50
-40
-30
-20
-10
Sine wave amplitude (dBFS)
0
Fig. 4. Plot of the SNR vs. sine wave amplitude of the asynchronous deltasigma converter chip(the sine wave frequency is 1 kHz, the converter signal
bandwidth is 6 kHz, and 0 dBFS refers to 0.2 V full scale amplitude)
input referred noise. Larger transconductance, or equivalently
larger unity gain bandwidth with constant load capacitance, is
also preferable because the regeneration speed of the positive
feedback is faster [8] and thus the output requires less delay
to reach logical states. Actually it is the variance of the delay
that affects the reconstruction performance since the mean of
the delay can be cancelled in the algorithm. The variance of
the delay arises from its dependence on the slew rate of the
input voltage of the Schmitt trigger. The variance of the delay
is smaller for larger unity gain bandwidth which results in
better performance. It is clear from Eq 6 and 7 that a tradeoff
must be made between the reference voltage swing and the
transconductance to choose proper transistor W/L ratio for
given bias currents. Also from Eq 8 less reference voltage
swing, vrh − vrl i.e. Vo , is helpful to reduce the noise power
due to the leaky integrator, which is yet another tradeoff.
IV. CHIP TEST RESULTS
The chip was fabricated using AMI 0.5 µm CMOS Technology using MOSIS. The core die area is 27600 µm2 . For
the integrator, the capacitance is 10 pF, and the bias currents
Ib0 and Ib1 are 5 µA and 4 µA respectively, the common
mode input voltage is 2.6 V and the common mode output
voltage is 1.8 V. For the Schmitt trigger, the reference voltage
Vref is 1.8 V, the bias currents Ib1 and Ib2 are 36 µA and
26 µA, and the corresponding (vrh − vrl ) = 0.5 V. For
the 1-bit DAC, logic high and logic low correspond to 2.7
V and 2.3 V, which means a = 0.2 V. The input voltage
sine wave is x(t) = 2.5V + A sin(2πf t). A logic analyzer is
used to capture transition timings of the chip output, and then
the signal is reconstructed in Matlab to a uniformly sampled
sequence using the algorithm discussed in Section II. We have
implemented two tests to characterize the chip performance
based on the IEEE standard 1241 for ADC test [9].
a) 4-parameter sine wave fitting test: Figure 4 shows the
measured SNR vs. the amplitude of the sine wave with 1 kHz
frequency, where the signal bandwidth of the converter is 6
kHz (Ωs = 12000π rad/sec), and 0 dBFS refers to a sine wave
Differential Nonlinearity (LSB)
SNR (dB)
50
45
40
35
30 2
10
3
10
Sine wave frequency (Hz)
10
4
Fig. 5. Plot of the SNR vs. sine wave frequency of the asynchronous deltasigma converter chip(the sine wave amplitude is -2.5 dBFS)
with 0.2 V amplitude. As the sine wave amplitude increases,
the SNR increases with a slope of 1dB/1dB to reach the peak
of 51 dB at around −2.5 dBFS, and then quickly drops to
0 dB. The SNR drop is due to the increased nonlinearities
caused by the larger amplitude signal input and the frequency
aliasing caused when the maximum interval between adjacent
transition timings grows larger than the Nyquist period π/Ωs .
We conclude that the chip can achieve 51 dB SNR (more
than 8-bit resolution). The power consumption of the chip
excluding pads and buffers is around 715 uW. In order to show
that the performance is consistent for different frequencies, we
also provide a plot of the SNR vs. the frequency of the sine
wave with a −2.5 dBFS amplitude in Figure 5. The SNR is
above 50 dB for frequencies up to 6 kHz bandwidth.
b) Sine wave histogram test: Sine wave histogram testing
is also performed to measure the differential nonlinearity
(DNL) and integral nonlinearity (INL).The input signal to the
chip is a sine wave with a 1 kHz frequency and a −2.5dBFS
amplitude. The sampling frequency of the reconstructed signal
is not harmonically related to the sine wave frequency as
required by the IEEE standard 1241. With the assumption of
8 bit resolution, the nonlinearities are calculated and plotted
in Figure 6. We can see both DNL and INL are less than 1
LSB, which verifies that the chip achieves an 8-bit resolution.
V. C ONCLUSION
We have shown how to implement an asynchronous deltasigma converter for analog to digital conversion. The schmitt
trigger presented here is a completely novel idea.To the best of
our knowledge, this implementation is the first asynchronous
delta-sigma converter chip to have been successfully built for
analog to digital conversion. We believe this architecture has
promise for low power consumption because of the extreme
simplicity of the required analog circuitry and no need for high
oversampling. The circuit design can be improved to lower
power requirements and increase usable input linear region
for AC signal.
Integral Nonlinearity (LSB)
55
1
0.5
0
-0.5
-1
0
50
100
150
200
250
0
50
100
150
Output Code
200
250
1
0.5
0
-0.5
-1
Fig. 6. Plots of the DNL and INL from the sine wave histogram test of the
asynchronous delta-sigma converter chip
The overall ADC performance is determined by the accuracy of the sample time and will take advantage of the
faster circuitry provided by the VLSI process scaling. Since
the nonuniform sample sequence is discrete in amplitude and
robust to transmission noise, the sample sequence can be transmitted out of the converter front end and the reconstruction
algorithm can be run remotely in locations where power and
circuit size are not a big issue. These characteristics determine
that the asynchronous delta-sigma converter will likely be
suitable for power limited applications such as remote sensing
and implanted biomedical devices.
R EFERENCES
[1] J. Cherry and W. Snelgrove, Continuous-time Delta-Sigma Modulators
for High-speed A/D Conversion: Theory, Practice, and Fundamental
performance Limits., Kluwer Academic Publishers, Boston, 1999.
[2] E. Allier, G. Sicard, L. Fesquet, and M. Renaudin, “A new class of
asynchronous A/D converters based on time quantization,” in Proceedings of the Ninth International Symposium on Asynchronous Circuits
and Systems, Vancouver, May 2003, pp. 196-205.
[3] E. Roza, “Analog-to-digital conversion vis duty-cycle modulation,”
IEEE Transactions on Circuits and Systems II: Analog and Digital
Signal Processing, vol. 44, no. 11, pp. 907-914, November 1997.
[4] A. Lazar and L. Toth, “Time encoding and perfect recovery of
bandlimited signals,” in IEEE International Conference on Acoustics,
Speech, and Signal Processing, April 2003, vol. 6, pp. 709-712.
[5] H. Feichtinger and K. Gröchenig, “Theory and practice of irregular
sampling,” in Wavelets: Mathematics and Applications, J. Benedetto and
M. Frazier, Eds., Boca Raton, FL, 1994, pp. 305-363.
[6] D. Wei and J. Harris, “Signal reconstruction from spiking neuron models,” in Proceedings of the 2004 International Symposium on Circuits
and Systems, vol. 5, Vancouver, May 2004, pp. 353-356.
[7] A. Lopez-Mietin, A. Carlosena, and J. Ramirez-Angulo, “Versatile cmos
and bicmos linear transconductor circuits,” vol. 2, August 1999, pp.
1024-1027.
[8] T. Kacprzak and A. Albicki, “Analysis of metastable operation in RS
CMOS flip-flops,” IEEE Journal of Solid-State Circuits, vol. SC22, no. 1,
pp. 57-64, February 1987.
[9] IEEE Standard for Terminology and Test Methods for Analog-to-Digital
Converters. New York: IEEE, December 2000.
[10] J. Márkus, “ADC test data evaluation program for matlab,”
http://www.mit.bme.hu/projects/adctest, May 2004.
[11] J. Doernberg, H. Lee, and D. Hodges, “Full-speed testing of A/D
converters,” IEEE Journal of Solid-State Circuits, vol. SC19, no. 6, pp.
820-827, December 1984.