Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
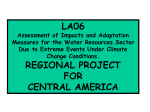
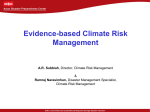
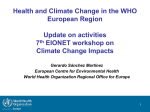
Variability-Driven Predictive Control of Grip Forces Alkis M. Hadjiosif and Maurice A. Smith Previous work has shown that grip forces (GFs) can be predictively controlled to account for environmental dynamics (e.g. Flanagan and Wing, 1993). However, studies on the predictive control of GF have focused on the relationship between GFs and the expected value of environmental dynamics. Here we show that changes in the standard deviation of environmental dynamics have greater effects on experimentally observed GFs than changes in the expected value of these dynamics. During object manipulation – for example, holding a wine glass – GFs are applied to prevent slippage. The minimum GF required to prevent slip depends on the product of the glass's weight & the friction coefficient between its surface & our fingers. However, a safety margin above this minimal required GF is often maintained (Westling & Johannson, 1984) in order to reduce the chance that unexpected perturbations, mis-estimation of load forces, or errors in GF production result in slippage. We hypothesize that the motor system could efficiently balance effort against the risk of slippage by using knowledge of environmental variability to modulate the size of the safety margin. When environmental variability is low, the motor system can afford to keep the safety margin low without risking slip, whereas a large safety margin would be beneficial if variability is high. For example, when two distributions of perturbations with the same mean but different amounts of variability are presented, the motor system could try to modulate GF to a magnitude that ensures the same level of confidence against slip (Fig 1B). This will result in greater GFs and, on average, greater safety margins when variability is high. In contrast, altering manipulatory forces (MFs) with the variability of this distribution would be undesirable, as this would result in over- or under-compensation (Fig 1B). Correspondingly, we predict that GFs would be determined by both the mean and the standard deviation of the perturbation magnitude, whereas MFs should be determined almost entirely by the mean. We began by designing a task in which environmental variability could be systematically controlled (experiment 1). Subjects performed reaching movements in a viscous force-field (FF) environment, while grasping a manipulandum using a precision grip (Fig 1A). Critically, the magnitude of the FF, b, randomly varied from one trial to the next with a mean of zero and a σ that could assume four different levels (Fig 2A-C). We found that GFs increased systematically when variability levels were higher (Fig 2DE, 3AB, p<10-6), whereas MFs did not (Fig 2FGH, p > 0.3), suggesting that GFs but not MFs are modulated by environmental variability. We next examined whether the modulation of GFs by variability could explain adaptation patterns in learning tasks that are deterministic. We focused on a step change in environmental dynamics, using a constant viscous FF (experiment 2) suddenly introduced. We hypothesized a simple model in which both the mean and variability of the environment are estimated over a window of past experience. Panels A through F of Fig 3 illustrate the responses to suddenly introduced external dynamics based on an implementation of this model in which the window was exponentially shaped. After a FF is encountered, mean estimates monotonically approach a level specific to the new environment (below or above baseline, depending on whether the FF increases or decreases the load, as shown in Fig 3AB). In contrast, variability estimates are always positive, regardless of the sign of the FF, increasing after FF onset and falling thereafter (Fig 3DE). The overall adaptation, which is the sum of these components, predicts two very unusual learning curves: (1) an overshoot in the adaptation to a positive FF and (2) a bimodal adaptation to a negative FF that changes in sign from positive to negative. Remarkably, we observe grossly asymmetric, non-monotonic patterns of GF adaptation that closely match the mean+variability predictions (Fig 3CF) when learning curves for positive (leftward) FF and negative (rightward) FF data are compared (Fig 3H). In contrast, MFs show symmetric, monotonic learning curves for both FFs – as would be predicted if adaptation to variability did not play a role (Fig 3J). The actual GF patterns (GF(t)) corresponding to the learning curves plotted in Fig 3HJ are illustrated in Fig 4. Note that the adaptation patterns observed in 3H and 3J can be decomposed into components that are specific and non-specific to the sign of the FF by taking the differential and common modes of the data ([x1-x2]/2 versus [x1+x2]/2, respectively) as shown in Fig 3GI. Since adaptation to the mean is specific to the sign of the FF but adaptation to the variability is not (Fig 3AD versus 3BE), this decomposition should reflect adaptation driven by the mean versus the variance. In line with this idea, the model illustrated in 3A-F accurately predicts the shapes of the decompositions displayed in Fig 3GI. Finally, if we compare the degree to which GF is modulated by variability (slopes of GF traces in 2H or 2I) versus mean (the ratio of the asymptotic GF adaptation levels in 3H to applied FF strength), we obtain a ratio of 3.5x, illustrating that GFs are much more sensitive to the variability than to the expected value of environmental dynamics. Together these results demonstrate that GF adaptation is largely driven by variability. We show that variability-driven GF adaptation takes place both in intrinsically variable environments, and after changes in environmental dynamics. In the latter case, the variability-driven component can produce very unusual adaptation patterns that, in some cases, overshoot and, in others, transiently adapt in the wrong direction The degree to which GFs are modulated by environmental variability suggests that they may be a experimental potent tool for probing the mechanisms by which the motor system estimates variability. GF* - Load/η Figure 1: Grip and Manipulatory Forces under a motor perturbation. A: Forces exerted on and from the subject. B: higher levels of load variability (bottom row) require higher GFs to maintain the same confidence against slip (even if μ is the same). In contrast, manipulatory forces are unaffected by changes in variability. 3 2 1 Mean adaptation level (Ns/m) 0 1 2 3 σb (Ns/m) 4 Exp. 1a Exp.1 4 2 0 −2 .2 0 -. 2 −600 −300 0 300 600 Time rel. to max load (ms) F 0 G 6 4 2 I low σ medium σ high σ Sum (overall adaptation) trial number 100 no σ 0 1 0 I .5 2 b=0 1 0 trial number 50 b<0 C 0 0 8 1.5 G .5 0 -.5 −600 −300 0 300 600 Time rel. to max load (ms) E D −50 7 −4 −4 −2 0 2 4 Change in σb (Ns/m) 150 200 4 2 0 −50 0 50 100 150 200 Trial number relative to forcefield onset 10 trial number H Leftward FF Rightward FF 8 Figure 3: Model of two-component force adaptation and experimental results. Estimates of the mean value (A,D) and standard deviation (B,E) of a perturbation (thick black dotted line) both add up to produce an overall adaptation curve for grip forces (C,F) - panels A-C represent b > 0 and panels D-F represent b < 0. This model accounts for grip force behavior (the actual grip force adaptation curves are given in H). The FF-specific (magenta) and non-specific (green) components of GF from our data well match the nmodel predictions for FF-specific and non-specific components (panel G). Manipulatory forces comprise solely of FF-specific components (I), as the adapation to opposing FF is almost perfectly symmetrical (data in J). 6 4 Leftward FF GF Level (Ns/m) E Adaptation to var. (non-specific comp.) 0 MF Level (Ns/m) 4 5 6 Block number 0 0 6 3 B 0 8 2 3 Figure 2: Experiment 1: design and results. Example distribution of values of b (A), corresponding std. of b per block (B) and characteristic load force patterns (C). Results: GF and MF profiles (D and F) and change from the zero-σ level (E and G). Summary of results: H: GF vs. σ; I: block-to-block change in GF vs. block-to-block change in σ. We calculated the GF level at each trial by regressing the GF profile observed in that trial onto the shape of the viscous perturbing force. A 8 1 GF adaptation level (Ns/m) Rightward FF Leftward FF Adaptation to the mean (specific comp.) b << 0 0 F b>0 4 2 0 −2 −4 6 −50 0 50 100 150 200 J 4 2 0 2.5 1.5 B 2 1 −4 −6 −50 0 50 100 150 200 Trial number relative to force−field onset 2 1.5 0.5 0 −600 −300 C 1 0.5 0 0 300 −600 −300 600 1.5 1 0.5 0 −0.5 −600 −300 0 300 600 Time rel. to peak load (msec) −2 −8 A MF (N) - Load slip 400 Exp. 1a, GF Exp. 1, GF Exp. 1a, MF Exp. 1, MF D 0 MF (N) No slip 350 GF (N) Undercomp. error 300 6 3 0 4 D LFμ/η 150 200 250 Trial number GF (N) GF* LFμ MF* - Load/η 100 Rightward Overcomp. error - Load 50 MF adaptation level (Ns/m) High - uncertainty case MF* LFμ/η b >> 0 0 MF change (N) LFμ B Grip force (N) Low - uncertainty case B 0 5 Change in mean GF adaptation level (Ns/m) GF H C Grip force change (N) MF LF FF strength b (Ns/m) A GF σb (Ns/m) Primary movement axis Man. force (N) A −1 0 300 600 −0.5 −1.5 −2 −600 −300 0 300 600 Time rel.to peak load (msec) Figure 4: Average force profiles for the early (first 20 trials) and late (last 60 trials) stages of learning, for both GF (panels A,C) and MF (panels B,D). References Flanagan, JR, Wing, AM. (1993) Modulation of grip force with load force during point-to-point arm movements, Exp Brain Res 95:131-43 Westling G, Johannson RS. (1984) Factors Influencing the Force Control During Precision Grip, Exp Brain Res 53: 277-84