Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
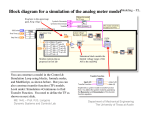
Modeling of Lumped-Parameter Electromechanical Systems Prof. R.G. Longoria Fall 2010 ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Typical Energy-Storing Transducers L(x) ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems C(x) Department of Mechanical Engineering The University of Texas at Austin Lumped-Parameter EM • Sufficient accuracy in most cases by building a ‘lossless model’ of the coupling system • Energy methods are used to “provide simple and expeditious techniques for studying the coupling process” [WM=Woodson & Melcher]. • We will look at ways to derive the stored energy and for obtaining the “forces of electric origin”. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Electromechanical Coupling “There are four technically important forces of electric origin. • The force resulting from an electric field acting on a free charge. • The force resulting from an electric field acting on polarizable material. • The force resulting from a magnetic field acting on a a moving charge (a current). • The force resulting from a magnetic field acting on magnetizable material.” [WM] ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin EQS vs. MQS • We focus on ‘quasi-static’ systems, where the fields that give rise to forces are dominantly electric or magnetic, but not both. • EM Quasi-static laws are formulated by neglecting the coupling terms in Maxwell’s equations, so that electromagnetic waves that would result from this coupling are neglected. • We define [HM]: EQS = Electro-Quasi-Static systems MQS = Magneto-Quasi-Static systems • These ‘model’ types are commonly used in electromechanical dynamics. • This assumption allows you to determine the electric and magnetic field characteristics independently. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin “Lossless” magnetic field coupling ‘Terminal relations’ λ = λ (i, x) f e = f e (i, x) ‘Multiport relations’ Here force is current analog. Woodson and Melcher [WM] ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin “Lossless” electric field coupling v = v ( q, x ) e e f = f ( q, x ) or f e = f e ( v, x ) Here force is current analog. Woodson and Melcher [WM] ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Woodson and Melcher [WM] Department of Mechanical Engineering The University of Texas at Austin Bond Graph Multiports Later we’ll see where this comes from. or ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Mixed Energy-Storing IC-Multiport • Reference: KMR, Chapter 7 and Chapter 8 • For devices that “act” like I-multiports on some ports and like C-multiports on others. n j n i =1 i =1 k = j +1 E = E ( p, q) = ∫ ∑ ei fi dt = ∫ ∑ fi dpi + ∫ ∑ ek dqk ∂E fi = , i = 1, 2,… , j ∂pi From Ch. 7 of KMR ∂E ek = , k = j + 1, j + 2,… , n ∂qk ∂fi ∂ek ∂2 E = = ⇐ Reciprocity ∂qk ∂qk ∂pi ∂pi ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Summary of the Approach 1. Identify the lossless energy-storing multiport as an EQS or MQS system 2. Model EQS systems with multiport C and MQS with multiport IC 3. Identify the relevant electrical constitutive relation, typically as ‘electrically linear’ 4. Derive the respective energy expression for the multiport model (potential or ‘mixed’). This requires an implied integration path that forces unknown terms to zero, but provides a general state-determined energy expression. 5. Use the energy expression to derive the force expressions by taking partial derivatives with respect to the related displacement variables. EQS v qɺ F xɺ C v= MQS 1 q C ( x) λɺ i i= IC F xɺ 1 λ L( x) U qx = ∫ vdq + ∫ Fdx Eλ x = ∫ id λ + ∫ Fdx ⇓ ⇓ U qx = ∫ vdq + ∫ Fdx =0 Eλ x = ∫ id λ + ∫ Fdx =0 F= ∂U qx ∂x F= ∂Eλ x ∂x For rotational EM devices, replace F-x with T-θ. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin The following example problems with EM elements illustrate the use of these methods. The idea is to see that you can integrate EM device models into your bond graph modeling toolbox with relative ease. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Butterfly Condenser* The capacitance of a ‘butterfly condenser’ (see figure below) varies with rotor position according to the relation C(θ) = C0 + C1 cos(2 θ), where C0 and C1 are constants. The rotor has axial moment of inertia J and turns on low-friction fixed bearings. 1. Develop a bond graph model of this system and derive the state equations. We are interested in determining the rotor dynamics, particularly when an ideal constant-voltage source E0 is connected across the condenser. 2. Use your equations to determine all equilibrium positions for the rotor. Which are stable? 3. What is the natural frequency of small oscillations in the neighborhood of a stable equilibrium position? 4. What is the maximum electrical torque available if: C0 = 15 x 10-12 farad, C1 = 10 x 10-12 farad, and E0 = 1,000 volts? 5. If the rotor shaft is 1 millimeter in diameter and the rotor mass is 100 grams, estimate the minimum coefficient of friction required to prevent motion. Assume negligible resistance on the electrical side. C (θ ) = C0 + C1 cos 2θ *From Crandall, et al, “Dynamics of Mechanical and Electromechanical Systems,” McGraw-Hill, 1968. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Electrostatic Motor An electrostatic motor, shown in cross-section below, has a fixed cathode of radius r, a rotor of thickness t comprising alternate 90° segments of high dielectric constant kHε0 and low dielectric constant kLε0, and an outer anode with four equal segments. A high constant voltage Vo is attached to terminals A-A and a zero voltage to terminals B-B; every quarter revolution of the rotor the voltages are switched. The unit has thickness w. The clearances may be assumed to be very small. 1. 2. 3. 4. 5. Estimate the potential energy stored in the electric fields of the motor, valid for up to 90° of rotation. Find the torque, T, generated by the motor in terms of the information given. Find the electric current required by the motor. Develop a bond graph model that couples the electrical and mechanical dynamics, including rotational inertia and friction. Write state equations. From F.T. Brown, “Engineering System Dynamics,” Marcel-Dekker, NY, 2001. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Plunger-type solenoid (1) A simple plunger-type solenoid for operation in relays, valves, etc. is shown. Assume a conservative energy-storing model, using an electrically linear relation, L λ = L( x)i = o ⋅ i 1 + x a We can model this type of device two ways: “Mixed energy-storing” multiport λɺ i IC F xɺ Direct energy-storing multiport λɺ i ..N M G ϕɺ C F xɺ Decision to use one of these versus the other depends on information available. ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Plunger-type solenoid (2) Let’s apply the mixed-energy storing multiport concept to the basic solenoid. λɺ i IC F xɺ 1 i = i (λ , x ) = λ L( x) F = F (λ , x ) = ? As for any multiport, we can use energy, E = E (λ , x ) = E o assume = 0 ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems λ x 0 0 + ∫ id λ + ∫ Fdx Department of Mechanical Engineering The University of Texas at Austin Example: Plunger-type solenoid (3) Once we find the energy, we can use the constitutive restrictions, ∂E i= ∂λ ∂E F= ∂x We can choose an integration path, bring energy to value at λ while dx = 0, and using the known inductance relation, 2 λ λ λ 1 λ E = E (λ , x) = ∫ id λ = ∫ dλ = 2 L( x) 0 0 L( x) Now, the force becomes where, dL( x) L′( x) ≜ dx ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems ∂E λ 2 d 1 λ 2 L′( x) F= = = ∂x 2 dx L( x) 2 [ L( x) ]2 What is the holding force, given x and i? Department of Mechanical Engineering The University of Texas at Austin Example: Plunger-type solenoid (4) Complete bond graph Apply causality Derive state equations R:Rcoil 1 λɺ i R:friction IC F xɺ 1 I:m plunger ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Angular-Motion EM system The device shown has a driving blade that is made of iron, and can move in the air gap. Given: L(θ ) = A + B θ As well as other parameters. This system also lends itself to an IC-multiport model. λɺ i IC T θɺ ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems 1 i = i (λ , θ ) = λ L(θ ) T = T (λ , θ ) = ? Department of Mechanical Engineering The University of Texas at Austin Example: EM transducer systems from Crandall, et al (1) ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: EM transducer systems from Crandall, et al (2) ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Woodson and Melcher Note, when you see µ → ∞ in a problem, it indicates you can assume that you can ignore the energy stored in the ‘core material’. For example, in this case most of the energy would be stored in the air gap. Basically, when µ goes to zero, the ‘reluctance’ to setting up a magnetic flux in the material is very small (i.e., highly permeable material) ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Woodson and Melcher ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin Example: Alternator (from KMR) The basic transduction mechanism for electrical alternators and motors may be understood by studying the ideal energystoring transducer shown below, consisting of a fixed and a moving coil. Assume the two currents and the torque t are related to two flux-linkage variables λ1, λ2 and the angular position θ, i = i (λ , λ , θ ) 1 1 1 2 i2 = i2 (λ1 , λ2 , θ ) τ = τ (λ1 , λ2 ,θ ) For the electrically linear case, it is conventional to specify self- and mutual- inductance parameters; for example, L1 L0 cos θ L0 cos θ i1 λ1 = L2 i2 λ2 where L0, L1, L2 are constants and: 1. What kind of bond graph element describes this device? 2. Derive the torque relation from the inductance matrix above by computing the stored energy at fixed θ when λ1 and λ2 are brought from zero to final values and then differentiating the energy function with respect to θ (see pp. 322-323 of Crandall, et al handout – attached). ME 383Q – Prof. R.G. Longoria Modeling of Physical Systems Department of Mechanical Engineering The University of Texas at Austin