Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Notes on Solving Algebraic
Equations
Prof. R.G. Longoria
October 2001/edits 10/2015
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Matlab Use
• These notes contain reference to using basic commands in
Matlab, and writing m-files that run in Matlab.
• You can also solve these problems using other software
packages such as LabVIEW, MathCAD, or Mathematica, as
well as some freeware packages (python, octave, etc.)
• One issue in choosing a package is availability of examples and
compatibility.
• Another issue might be learning curve. Choose one that is easy
for you to use.
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Solving Algebraic Equations
• Solving Linear Algebraic Equations
– Basic examples
– Advanced Matrix Operations
– Other Examples
• Solving Nonlinear Algebraic Equations
– fsolve
– fzero
– Newton
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Relevance of Solving Algebraic Equations
• State space ODEs
dx
= f (x, t )
dt
• Steady state and equilibrium problems
dx
= f ( x, t ) = 0
dt
Linear Case
Ax = b
Solve with Gauss elimination
Ill-conditioned cases
Unique solution if it exists
ME 383Q
Modeling of Physical Systems
Nonlinear Case
f ( x) = 0
Solve with Newton method
May have multiple solutions
Iterative method
Department of Mechanical Engineering
The University of Texas at Austin
Solving Linear Case in Matlab
• Gauss elimination is implemented in the slash
(/) and backslash (\) operators.
xA = b
» A = [2 3;6 7];
» b=[1 3];
» x = b/A
x=
2.7500 -0.7500
Ax = b
» b = [5;6];
» A\b
ans =
-4.2500
4.5000
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Singular and Ill-Conditioned Matrices
• Equations not independent: no unique solution
• Inverse does not exist; singular matrix
• Condition number (cond()) gives measure of
how close to singular*; large cond implies illconditioned matrix
*cond is normalized distance between matrix and nearest singular matrix. cond() is a 2-norm of the
matrix. Rule of thumb: log10(cond(A)) is the number of significant digits you can expect to
lose in Gaussian elimination.
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example 1: Elastic system
5kx1 − 2kx2 = F
− 2kx1 + 4kx2 = 2 F
5k
− 2k
− 2k x1 F
=
4 k x2 2 F
Ax = b
» x = A\b
» k = 1; F = 1;
» A = [5*k -2*k;-2*k 4*k]
» b = [F;2*F]
A=
b=
5 -2
-2 4
ME 383Q
Modeling of Physical Systems
1
2
x=
0.5000
0.7500
Department of Mechanical Engineering
The University of Texas at Austin
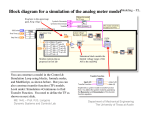
Example 2: Resistive circuit
In this circuit example, we
are interested in the
power delivered to R5.
Two equations for loop
currents.
R1 + R2 + R3
− R3
Define A matrix
in MATLAB:
ME 383Q
Modeling of Physical Systems
− R3
i1 v1 − v2
=
R3 + R4 + R5 i2 v2 − v3
A = [(R1+R2+R3) -R3;-R3 (R3+R4+R5)];
Department of Mechanical Engineering
The University of Texas at Austin
m-file Development
• In this example, we want to vary one of the
voltage sources, and compute the resulting
power across resistor 5.
• In the following m-file, note that this can be
done with no for or while loops. All variation
is implicit with the array addressing.
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
M-file
% Modeling and Simulation with Matlab/Simulink
% Exercise on Solving Linear Equations
%
% This file generates a solution for a linear circuit
% problem (solves for currents).
% A plot of the power delivered to resistor 5 is generated
% as one of the voltage sources is varied.
%
% Written 9/9/99 (RGL).
% Last revised: 2/27/2000.
%
% Define b array (here it turns into a matrix
b = [E1-E2;E2-E3];
% Solve for currents, x = inv(A)*b
% Note, make sure your dimensions match:
% 2x2 * 2x21 => 2x21 (solution)
x = A\b;
% Now, extract the i2 current, which is x(2,:) in Matlab notation
i2 = x(2,:);
clear; help solve_circuit1
% Define Resistor Values
R1=1;R2=1;R3=2;R4=2;R5=5;
% Define fixed voltage sources
E1 = 2; E3=5;
% Compute P5 = R5*i2.*i2; OR P5 = R5*i2.^2
% Note, the dot before the ^ or * operator allows you
% to operate on an element by element basis.
P5 = R5*i2.*i2;
% Plot P5 versus E2
% Define E2 as range of voltages
E2 = 0:1:20;
% Define A matrix
A = [(R1+R2+R3) -R3;-R3 (R3+R4+R5)];
ME 383Q
Modeling of Physical Systems
plot(E2,P5)
title('Power Delivered to Resistor 5 vs. E2')
xlabel('E2, Volts')
ylabel('Power, Watts')
Department of Mechanical Engineering
The University of Texas at Austin
Plot of Power in R5 vs. v2
Power Delivered to Resistor 5 vs E2
3
2.5
Power, Watts
2
1.5
1
0.5
0
0
2
ME 383Q
Modeling of Physical Systems
4
6
8
10
12
E2, Volts
14
16
18
20
Department of Mechanical Engineering
The University of Texas at Austin
Nonlinear Algebraic Equations
• We need to solve the vector of functions:
f ( x) = 0
• One-variable Newton’s method: fzero()
• Example: Ginzburg eq λɺ = − x + λx 3
Create this function file,
and solve with fzero()
(roots?)
ME 383Q
Modeling of Physical Systems
function f = ginzburg(x)
global lambda
f = -x+lambda*x.^3;
Department of Mechanical Engineering
The University of Texas at Austin
Optimization Toolbox
If our installation has the Optimization Toolbox, use the solver
functions provided. Type at the command line:
» help optim
Optimization Toolbox.
Version (will depend on your Matlab installation)
(excerpt from many function listed)
Nonlinear zero finding (equation solving).
fzero
- Scalar nonlinear zero finding.
fsolve
- Nonlinear system of equations solve (function
solve).
f ( x) = 0
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
fsolve()
» help fsolve
fsolve Solves nonlinear equations by a least squares method.
fsolve solves equations of the form:
f(x)=0 where f and x may be vectors or matrices.
x=fsolve(fun,x0) starts at the matrix x0 and tries to solve the
equations described in ‘fun’. ‘fun’ is usually an m-file that returns
an evaluation of the equations for a particular value of x: f=fun(x).
Without Optimization Toolbox, you need to write your own code. The
following slides explain one approach you’d need to take.
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Newton’s Method
• Initial guess
• Error δx = x1 − x*
approx
−1
δx = f ( x1 ) D ( x)1
Newton’s method
is based on a Taylor
expansion around the
root
f(x)
solution
x
• New guess
x1
• D is the Jacobian matrix
x2 = x1 − δx = x1 − f ( x1 ) D −1 ( x1 )
ME 383Q
Modeling of Physical Systems
x2
Dij (x) ≡
x3
x0
∂f j (x)
∂xi
Department of Mechanical Engineering
The University of Texas at Austin
Function m-files
• In creating a function m-file, note that you need
to specify array indexing:
• For example: for a function with 2 states
function f = myfunction(x)
f = [x(1)*x(2);x(1)+x(2)^2];
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: Nonlinear Mass-Spring
m2
g
f1 = −k1 ( X 1 − L1 ) + k 2 ( X 2 − L2 )
X2
Y
X 22 − X 12
f 2 = k 2 ( X 2 − L2 )
− m2 g
X2
k2
θ
X1
X2
k1
m1
X1
A “calling routine” (m-file)
globally defines these
values
function f = twodspring(x)
global g m1 k1 L1 m2 k2 L2
f1 = -k1*(x(1)-L1)+k2*(x(2)-L2)*x(1)/x(2);
f2 = -m2*g+k2*(x(2)-L2)*sqrt((x(2))^2-(x(1))^2)/(x(2)))];
f = [f1;f2];
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin
m-file calling fsolve()
% This program solves a system of nonlinear equations
% using the Matlab function: fsolve().
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Equations are defined by function twodspring
clear; help fstwodspring;
%
% Define constants needed for the two-dim. spring:
%
global g m1 k1 L1 m2 k2 L2
g = 9.81;
%
m1 = 0.1;
%
% Estimate k1: m1 deflects spring 10 mm
%k1 = m1*g/0.01;
k1 = 100;
%
L1 = 0.05;
%
m2 = 0.3;
%
ME 383Q
Modeling of Physical Systems
%
k2 = 50;
%
L2 = 0.1;
%
x0 = [L1 L2];
Note: you must
specify “guess”
%
% The following function calls the fsolve function.
% Note: fsolve() is part of the Optimization Toolbox and not
% a standard Matlab function.
%
x = fsolve('twodspring',x0)
Department of Mechanical Engineering
The University of Texas at Austin
Newton’s method algorithm
nsolve_twodk.m
for MATLAB
%
x = [L1 L2];
a = 0;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% The number of iterations before stopping is nsteps
% (This can be replaced by a check on convergence.)
%
nsteps = 10;
% Number of iterations before stopping
%
for icnt=1:nsteps,
[f dfdx] = twodk(x,a);
function [f,D] = twodk(x,a)
dx = f/dfdx;
% Function used by an n-variable Newton's method
x = x - dx;
% The variable a is a parameter (not used here)
end
global g m1 k1 L1 m2 k2 L2
%
% Display Result
f(1) = -k1*(x(1)-L1)+k2*(x(2)-L2)*x(1)/x(2);
x
f(2) = -m2*g+k2*(x(2)-L2)*sqrt((x(2))^2-(x(1))^2)/(x(2));
% Check Result
% df(1)/dx(1)
% flast should be close to zero
D(1,1) = -k1+k2*(x(2)-L2)/x(2);
[flast dfdx] = twodk(x,a);
% df(1)/dx(2)
flast
twodk.m
D(1,2) = k2*L2*x(1)/(x(2)*x(2));
% df(2)/dx(1)
D(2,1) = -k2*(x(2)-L2)*x(1)/(x(2)*x(2)*sqrt(1-(x(1)/x(2))^2));
% df(2)/dx(2)
D(2,2) = k2*(x(2)^3-L2*x(1)*x(1))/(x(2)^3*sqrt(1-(x(1)/x(2))^2));
return;
ME 383Q
Modeling of Physical Systems
Department of Mechanical Engineering
The University of Texas at Austin