Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Voltage optimisation wikipedia , lookup
Alternating current wikipedia , lookup
Mains electricity wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Buck converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Oscilloscope types wikipedia , lookup
Schmitt trigger wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Integrating ADC wikipedia , lookup
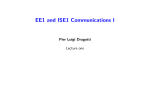
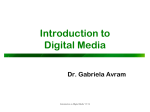
A Spiking-Neuron Collective Analog Adder with Scalable Precision Sung Sik Woo and Rahul Sarpeshkar Department of Electrical Engineering and Computer Science Massachusetts Institute of Technology Cambridge, MA 02139 Email: [email protected] Abstract—Although neurons function with locally imprecise analog computational units, they can collectively interact to achieve computations with high complexity, low error rate, or high precision. In this work, we show how many moderately precise integrate-and-fire analog units interact via the mechanism of a spiking ‘carry’ to collectively add numbers to arbitrary precision. For example, in a proof-of-concept implementation that we implemented with chips built in a 0.5 µm CMOS process, we show that four 4-bit precise analog units can collectively interact to implement 16-bit-precise addition. Errors in the analog computation are minimized via novel timebased calibration techniques. Our work may lay a foundation for future collective analog computation that is arbitrarily precise just as current digital computation is today. I. INTRODUCTION Neurons are computational cells in the brain that function with noisy, imprecise, and unreliable inputs, synapses, and ion channels whose local accuracy is relatively poor. Nonetheless, the brain routinely does tasks of evolutionary importance such as 0.1% relative frequency discrimination amongst sounds, 10-s-precise discrimination amongst inputs gathered from 1ms-precise cells, and complex visual pattern recognition and learning. Given that the brain is incredibly energy and space efficient [1], and that the naive averaging of information in time and space is not an efficient way to compute precisely, there is an increasing appreciation that the brain likely uses clever strategies to optimize reliability and precision [2]. The use of several moderate-precision analog units that collectively interact to compute functions with higher complexity and precision has been termed ‘collective analog computation’. Such computation is an important reason for why biological and neuronal systems are so efficient [1, 3]. Fig. 1 provides an example that illustrates the ideas behind collective analog computation with respect to encoding 8-bitprecise computations: Such computation is neither purely analog (one 8-bit-precise analog computational unit) nor purely digital (eight 1-bit-precise logic units) but a combination of both as shown. Each unit exploits physics or chemistry to efficiently compute an analog basis function at moderate precision and the interactions amongst such units lead to higher global precision or higher complexity. Collective analog computation is commonly found in biological systems, including in the retina, the cochlea, spiking neuronal systems, and gene-protein networks [1]. 978-1-4673-5762-3/13/$31.00 ©2013 IEEE Figure 1. 8-bit-precise computations in analog, digital, and collective analog systems [3]. In this paper, we take a step towards demonstrating collective analog computation in electronics by implementing arbitrarily precise addition with interacting moderate-precision analog units. Our work on addition provides time-based calibration and error-correction mechanisms that may generalize to other collective analog systems of the future. II. STRATEGIES FOR ADDITION A. Analog Basis Functions for Addition The analog basis function that we use for addition in each unit exploits Kirchoff’s Current Law and the integrating action of a capacitor. That is, two numbers are added on a capacitor by pouring corresponding amounts of charges one after another onto it. When a capacitor is charged by a constant current source (IREF), the voltage on the capacitor is set by the sum of the turn-on times (TON) of the current source, which is described by VC I REF TON 1 TON 2 / C (1) In order to generate the desired TON, a reference clock is used, with the duration of one clock period defined as the value ‘one’. The main purpose of the clock is to ‘write’ accurate digital inputs to each adding unit via a time-based digital-toanalog converter. The units themselves operate in a self-timed and asynchronous fashion. To detect overflows (sum ≥ 16) in each adding unit, if any, we use a reference threshold voltage (VREF) and an associated comparator. The overflow comparator output signals a pulsatile ‘carry’ that is used to communicate carry information amongst units. Each unit effectively functions like an integrate-and-fire spiking neuron that we have configured to perform addition. Analog charge information in the units is ‘read’ via a simple counting analog-to-digital operation or can be 1620 Figure 2. Four phases for addition. The purpose of the Copy phase is to compensate for the negative error voltage due to the comparator delay. Figure 4. The schematic of the Analog Switching Network, drawn with two copies of IREF and capacitors CA, CB, and CREF. Figure 3. The block diagram of a 4-bit adding unit. Figure 5. The schematic of the comparator. The selection of the negative input occurs inside the comparator, preventing a charge-sharing problem. preserved on the capacitor for short-term storage. The overall adder appears to be ‘digital’ from an input-output or writeread point of view but is ‘analog inside’: The adder uses no multi-level or binary-logic rules to add or to generate carries. The resolution of the digital-to-analog write and the analog-todigital read set the local precision of the adding unit from an input-output point of view. The precision of the analog operations within the adder are designed via calibration and error-correction mechanisms to be compatible with the resolution required by these write and read operations. The ability to write and read digital information from our analog adder also allows us to verify that it is computing with no error. B. Four Phases for Addition Fig. 2 illustrates four phases required for addition. First, in the Add and Carry phases, the first and the second number, and the carry-in are added to CA sequentially. If the voltage on CA exceeds VREF (stored in CREF), an overflow signal (a short pulse) is promptly fired by the comparator and the input is redirected to CB. Next, in the Copy phase, the value on CB is copied to CA. The purpose of the latter copy is to correct the the negative error voltage (minus yellow bar in Fig. 2) due to the comparator delay by adding a compensating positive voltage (plus yellow bar in Fig. 2). The resulting voltage is converted back to a digital number during the Read phase. C. Architecture The block diagram of the adder is shown in Fig. 3. Similar to a digital adder, A<3:0>, B<3:0>, S<3:0>, Cin, and Cout are the two digital inputs, the sum output, the carry-in, and the carry-out pulses, respectively. In addition, Clk is the reference clock, and Cal, Add, and Read are request signals to trigger corresponding operations. The analog computational core of the system consists of the current source (IREF), three capacitors (CA, CB, and CREF), the comparator, and the Analog Switching Network. The latter network controls which capacitors IREF is directed to, since IREF is used to charge different capacitors on different phases. The Write Unit and the Read Unit perform digital-toanalog and analog-to-digital conversion, respectively. The Calibration Unit digitally calibrates the reference threshold voltage (VREF), compensating for various errors as we discuss later. The Asynchronous Finite State Machine coordinates the sequential operation of the system in its various phases. III. CIRCUIT OPERATION A. The Analog Switching Network The Analog Switching Network, shown in Fig. 4, is a set of switches that are responsible for charging (M1, M3, and M6) and discharging (M2, M4, and M7) of the capacitors CA, CB, and CREF, using two copies of IREF. Inputs to the switches come from the Asynchronous Finite State Machine. The transistors M8 and M9 are used to discharge CREF at a relatively slow rate during digital calibration. In addition, M5 and M10 are differential-pair switches that are turned on to redirect IREF when none of their adjacent switches are turned on. The use of the latter switches minimizes charge injection. The use of minimum-size transistors for all switches reduces charge injection and clock feedthrough as well. The use of a single common current source between CA and CB eliminates current-source mismatch during Add, Carry, Copy, and Read phases. B. The Comparator The comparator is a crucial component of our system, since it is used in several phases. Its schematic is shown in Fig. 5 and consists of a classic two-stage amplifier 1621 Figure 7. The operation of the Digital Calibration Unit. INC_VREF and DEC_VREF pulses are generated to adjust the moment of threshold crossing. Figure 6. Simplified behavior of the Write Unit. (preamplifier + high gain OTA) topology [1], except for the fact that the first stage has an additional branch for the negative input terminal. The use of this additional branch prevents charge sharing between capacitors after switching: Depending on the phase, the negative input terminal is connected either to CB or to CREF, which requires selection circuitry. The presence of the additional branch causes such selection to occur inside the comparator rather than via switches connected to CB and CREF, thus eliminating a chargeredistribution problem among CB, CREF, and the parasitic capacitance at the negative input terminal of the comparator. C. The Write Unit (Time DAC) The Write Unit performs time-based digital-to-analog conversion, whose behavior is depicted in Fig. 6: When an Nbit (N=4 in this system) digital number is input into the Write Unit, N clock signals are generated by repeatedly dividing the input clock (CLK<0>) by two. Thus, the pulse width of each of these clock signals corresponds to the weight of each digital bit. The output pulse, OUTPULSE is then generated by outputting the first pulse of each clock signal, in a sequential fashion, but gated by each corresponding bit of the digital input. Therefore, the total duration during which OUTPULSE is high (TON in (1)) is proportional to the digital input value. Integrating an IREF current onto a capacitor for a duration determined by OUTPULSE then creates an analog output voltage, VOUT, that is proportional to the digital input, thereby performing digital-to-analog conversion. The exact instant of the threshold crossing should occur when 15.5 pulses of charge have been input to CA such that the distinction between 15 and 16 can be discerned with maximal noise margin. Our closed-loop calibration ensures that, independent of absolute capacitor values, current values, or threshold values, an adding unit always generates carries that are consistent with digital computation. Fig. 7 reveals how we calibrate an adding unit: If the comparator output pulse, COMPOUT, fires before 15.5, an INC_REF pulse is generated that serves to increase VREF and delay firing. If the COMPOUT pulse occurs after 15.5, a DEC_REF pulse is generated that serves to decrease VREF and hasten firing. The INC_REF and DEC_REF pulses respectively increase and decrease the value of VREF as shown in Fig. 4. Several iterations of calibration of VREF lead to successively smaller correction pulses and ensure that the calibration converges to an accurate value. F. The Asynchronous Finite State Machine The Asynchronous Finite State Machine (FSM) serves as the main controller of our system, and operates in an asynchronous and self-timed fashion. Its functions include the orchestration of the ‘Add-Carry-Copy-Read’ phases, generation of enable/reset signals to charge/discharge capacitors, storing and processing of incoming carry signals, the selection of comparator inputs, communication of request signals to other digital blocks, and other housekeeping functions. IV. D. The Read Unit (Counting ADC) The Read Unit converts an analog voltage on a capacitor (CA) into a digital number (summed output): CB is charged repeatedly, 1 LSB at a time, until the voltage on CB becomes greater than that on CA. This threshold crossing is detected by the comparator, which fires a short pulse. By counting the number of LSB pulses until the comparator firing event, we obtain the digital equivalent of the analog voltage. E. The Digital Calibration Unit The Digital Calibration Unit calibrates the threshold reference voltage (VREF) such that the comparator signals the VREF threshold crossing with little temporal error. To ensure that the digital bits output by the adder are correct, it is important to minimize this temporal error. The temporal error is caused by several sources that are outlined in Section IV. TABLE I. ERROR COMPENSATION SOURCES OF ERRORS AND COMPENSATION METHODS Source of Error Compensation Method Comparator input offset voltage Comparator & digital gate delay Capacitor charge errors (Charge injection, Charge sharing, Clock feedthrough, Leakage) Autozeroing, Dig. calibration Copy phase correction Use of differential-pair switching, Use of minimum-size transistors, Internally switched comparator Dig. calibration, Common centroid layout Dig. calibration, Use of single current source Capacitor mismatch Current-source mismatch In order to achieve reliability and energy efficiency, for each error source, corresponding error-correction methods were designed. A summary of our error-correction methods is 1622 Figure 8. A die photograph of the collective analog adder chip. listed in Table I. First, the input offset voltage of the comparator is compensated for by two different methods: Digital calibration compensates for offsets between the CA and CREF nodes while a standard auto-zeroing technique compensates for offsets between the CA and CB nodes. The delay of the comparator and digital gates is compensated for by Copy phase as described in Fig. 2. Sources of errors affecting the capacitor nodes (charge injection, charge sharing, clock feedthrough, and leakage) are compensated for by the use of differential-pair transistors for switches, minimum-size devices for comparator input transistors and switches, and through the use of internal switching in the comparator. The CA–CREF mismatch is compensated for by digital calibration while CA–CB mismatch is attenuated by common-centroid layout. IREF mismatches between our two current sources (one used for charging CA/CB and one used for charging CREF) is effectively compensated for by digital calibration. The charging of CA and CB is immune to current-source mismatch since the same current source is used for charging both capacitors. V. TABLE II. EXPERIMENTAL RESULTS MEASURED PERFORMANCE CHARACTERISTICS Parameter Value Technology Supply voltage Clock frequency Capacitor size (CA, CB, CREF) IREF VREF 1 LSB voltage Calibration time Add~Read time Compensated error in VREF Power consumption (analog parts) Power consumption (total) Chip size On-Semi 0.5 µm 2.5 V 250 kHz 59 pF 830 nA ~900 mV 56.3 mV ~800 µs ~400 µs < 0.5 LSB 11.0 µW 16.4 µW 1.5 mm × 1.5 mm Figure 9. An example of measured waveforms of the chip, computing 1010+1010+Cin=0101+Cout. The digital calibration and Add-Carry-CopyRead phases can be observed. Autozeroing occurs right before addition but is not visible in the figure since its results are stored on an internal capacitor. answers for all input sets. Fig. 9 shows an example of measured waveforms that correspond to the additive inputs 1010+1010+Cin=0101+Cout. Seven iterations of digital calibration and the four phases that we use to add are depicted in Fig. 9. Measured performance for a 4-bit adding unit is summarized in Table II. To prove that 16-bit addition was feasible, a printed circuit board was designed such that two 4-bit adder chips could interact via their carry signals. Then, two such boards were connected to create a 16-bit adder, which also produced correct outputs for every input set: All combinatorial possibilities were tested and found to be correct. VI. CONCLUSION We have presented a collective analog adder with spikingneuron units capable of arbitrarily precise addition. In particular, we tested that 16-bit-precise addition with four 4bit-precise interacting units was successful in an ONSemiconductor 0.5 µm process. The eight techniques of error correction that we presented in the paper were critical in ensuring that digital and analog computations were consistent, and should be useful in other collective analog systems of the future. ACKNOWLEDGMENT The authors would like to thank MOSIS for providing chip fabrication. This work was supported in part by the National Science Foundation under Grant NRI-NSF CCF-1124247 and by a campus collaboration initiative from MIT Lincoln Lab. REFERENCES [1] [2] A proof-of-concept collective analog adder chip with a 4bit adding unit was fabricated in an ON-Semiconductor 0.5 µm CMOS process. The die photograph of the chip is shown in Fig. 8. Five chips were tested, which all generated correct [3] 1623 R. Sarpeshkar, Ultra Low Power Bioelectronics: Fundamentals, Biomedical Applications, and Bio-Inspired Systems. Cambridge: Cambridge University Press, 2010. W. J. Ma, J. M. Beck, P. E. Latham, and A. Pouget, “Bayesian inference with probabilistic population codes,” Nature Neuroscience, vol. 9, pp. 1432–1438, 2006. R. Sarpeshkar, “Analog versus digital: extrapolating from electronics to neurobiology,” Neural Computation, vol. 10, no. 7, pp. 1601–1638, October 1998.