Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Advanced Statistics
Inference Methods & Issues:
Multiple Testing, Nonparametrics,
Conjunctions & Bayes
Thomas Nichols, Ph.D.
Department of Biostatistics
University of Michigan
http://www.sph.umich.edu/~nichols
OHBM fMRI Course
NIH Neuroinformatics / Human Brain Project
June 12, 2005
Overview
• Multiple Testing Problem
– Which of my 100,000 voxels are “active”?
• Nonparametric Inference
– Can I trust my P-value at this voxel?
• Conjunction Inference
– Is this voxel “active” in all of my tasks?
• Bayesian vs. Classical Inference
– What in the world is a posterior probability?
© 2005 Thomas Nichols
2
Overview
• Multiple Testing Problem
– Which of my 100,000 voxels are “active”?
• Nonparametric Inference
– Can I trust my P-value at this voxel?
• Conjunction Inference
– Is this voxel “active” in all of my tasks?
• Bayesian vs. Classical Inference
– What in the world is a posterior probability?
© 2005 Thomas Nichols
3
Hypothesis Testing
• Null Hypothesis H0
• Test statistic T
u
– t observed realization of T
• level
– Acceptable false positive rate
Null Distribution of T
– Level = P( T > u | H0 )
– Threshold u controls false positive rate at level
• P-value
– Assessment of t assuming H0
– P( T > t | H0 )
• Prob. of obtaining stat. as large
or larger in a new experiment
– P(Data|Null) not P(Null|Data)
© 2005 Thomas Nichols
t
P-val
4
Null Distribution of T
Hypothesis Testing in fMRI
• Massively Univariate Modeling
– Fit model at each voxel
– Create statistic images of effect
• Then find the signal in the image...
5
© 2005 Thomas Nichols
Assessing Statistic Images
Where’s the signal?
High Threshold
t > 5.5
Good Specificity
Poor Power
(risk of false negatives)
Med. Threshold
t > 3.5
Low Threshold
t > 0.5
Poor Specificity
(risk of false positives)
Good Power
6
© 2005 Thomas Nichols
...but why threshold?!
Blue-sky inference:
What we’d like
• Don’t threshold, model the signal!
– Signal location?
• Estimates and CI’s on
(x,y,z) location
ˆMag.
– Signal magnitude?
• CI’s on % change
– Spatial extent?
ˆLoc.
ˆExt.
space
• Estimates and CI’s on activation volume
• Robust to choice of cluster definition
• ...but this requires an explicit spatial model
© 2005 Thomas Nichols
7
Blue-sky inference:
What we need
• Need an explicit spatial model
• No routine spatial modeling methods exist
– High-dimensional mixture modeling problem
– Activations don’t look like Gaussian blobs
– Need realistic shapes, sparse representation
• Some work by Hartvig et al., Penny et al.
8
© 2005 Thomas Nichols
Real-life inference:
What we get
• Signal location
– Local maximum – no inference
– Center-of-mass – no inference
• Sensitive to blob-defining-threshold
• Signal magnitude
– Local maximum intensity – P-values (& CI’s)
• Spatial extent
– Cluster volume – P-value, no CI’s
• Sensitive to blob-defining-threshold
9
© 2005 Thomas Nichols
Voxel-level Inference
• Retain voxels above -level threshold u
• Gives best spatial specificity
– The null hyp. at a single voxel can be rejected
u
space
Significant
Voxels
© 2005 Thomas Nichols
No significant
Voxels
10
Cluster-level Inference
• Two step-process
– Define clusters by arbitrary threshold uclus
– Retain clusters larger than -level threshold k
uclus
space
Cluster not
significant
© 2005 Thomas Nichols
k
k
Cluster
significant
11
Cluster-level Inference
• Typically better sensitivity
• Worse spatial specificity
– The null hyp. of entire cluster is rejected
– Only means
that one or more of voxels in
cluster active
uclus
space
Cluster not
significant
© 2005 Thomas Nichols
k
k
Cluster
significant
12
Voxel-wise Inference &
Multiple Testing Problem (MTP)
• Standard Hypothesis Test
– Controls Type I error of each test,
at say 5%
– But what if I have 100,000 voxels?
5%
0
• 5,000 false positives on average!
• Must control false positive rate
– What false positive rate?
– Chance of 1 or more Type I errors?
– Proportion of Type I errors?
14
© 2005 Thomas Nichols
MTP Solutions:
Measuring False Positives
• Familywise Error Rate (FWER)
– Familywise Error
• Existence of one or more false positives
– FWER is probability of familywise error
• False Discovery Rate (FDR)
– R voxels declared active, V falsely so
• Observed false discovery rate: V/R
– FDR = E(V/R)
15
© 2005 Thomas Nichols
FWER MTP Solutions
• Bonferroni
• Maximum Distribution Methods
– Random Field Theory
– Permutation
16
© 2005 Thomas Nichols
FWER MTP Solutions:
Bonferroni
• V voxels to test
• Corrected Threshold
– Threshold corresponding to = 0.05/V
• Corrected P-value
– min{ P-value V, 1 }
17
© 2005 Thomas Nichols
FWER MTP Solutions
• Bonferroni
• Maximum Distribution Methods
– Random Field Theory
– Permutation
18
© 2005 Thomas Nichols
FWER MTP Solutions:
Controlling FWER w/ Max
• FWER & distribution of maximum
FWER = P(FWE)
= P(One or more voxels u | Ho)
= P(Max voxel u | Ho)
• 100(1-)%ile of max distn controls FWER
FWER = P(Max voxel u | Ho)
© 2005 Thomas Nichols
u
19
FWER MTP Solutions
• Bonferroni
• Maximum Distribution Methods
– Random Field Theory
– Permutation
20
© 2005 Thomas Nichols
FWER MTP Solutions:
Random Field Theory
• Euler Characteristic u
– Topological Measure
• #blobs - #holes
Threshold
– At high thresholds,
Random Field
just counts blobs
– FWER = P(Max voxel u | Ho)
No holes
= P(One or more blobs | Ho)
P(
1
|
H
)
u
o
Never more
E(u | Ho)
than 1 blob
21 Sets
Suprathreshold
© 2005 Thomas Nichols
RFT Details:
Expected Euler Characteristic
E(u) () || (u 2 -1) exp(-u 2/2) / (2)2
–
Search region R3
– ( volume
– || roughness
• Assumptions
– Multivariate Normal
– Stationary*
– ACF twice differentiable at 0
Only very
upper tail
approximates
1-Fmax(u)
* Stationary
– Results valid w/out stationary
– More accurate when stat. holds
© 2005 Thomas Nichols
22
Random Field Intuition
• Corrected P-value for voxel value t
Pc = P(max T > t)
E(t)
() || t2 exp(-t2/2)
• Statistic value t increases
– Pc decreases (of course!)
• Search volume () increases
– Pc increases (more severe MCP)
• Smoothness increases (|| smaller)
– Pc decreases (less severe MCP)
© 2005 Thomas Nichols
25
Random Field Theory
Strengths & Weaknesses
• Closed form results for E(u)
– Z, t, F, Chi-Squared Continuous RFs
• Results depend only on volume & smoothness
• Smoothness assumed known
• Sufficient smoothness required
• Multivariate normality
• Several layers of approximations
© 2005 Thomas Nichols
– Results are for continuous random fields
– Smoothness estimate becomes biased
Lattice Image
Data
Continuous Random
Field
26
Real Data
• fMRI Study of Working Memory
– 12 subjects, block design
– Item Recognition
Marshuetz et al (2000)
• Active:View five letters, 2s pause,
view probe letter, respond
• Baseline: View XXXXX, 2s pause,
view Y or N, respond
• Second Level RFX
– Difference image, A-B constructed
for each subject
– One sample t test
Active
D
UBKDA
yes
Baseline
N
XXXXX
no
27
© 2005 Thomas Nichols
• Threshold
Real Data:
RFT Result
• Result
– 5 voxels above
the threshold
– 0.0063 minimum
FWE-corrected
p-value
© 2005 Thomas Nichols
-log10 p-value
– S = 110,776
– 2 2 2 voxels
5.1 5.8 6.9 mm
FWHM
– u = 9.870
28
MTP Solutions:
Measuring False Positives
• Familywise Error Rate (FWER)
– Familywise Error
• Existence of one or more false positives
– FWER is probability of familywise error
• False Discovery Rate (FDR)
– FDR = E(V/R)
– R voxels declared active, V falsely so
• Realized false discovery rate: V/R
29
© 2005 Thomas Nichols
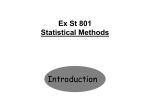
False Discovery Rate
• For any threshold, all voxels can be cross-classified:
Accept Null
Reject Null
Null True (no effect)
V0A
V0R
m0
Null False (true effect)
V1A
V1R
m1
NA
NR
V
• Realized FDR
rFDR = V0R/(V1R+V0R) = V0R/NR
– If NR = 0, rFDR = 0
• But only can observe NR, don’t know V1R & V0R
– We control the expected rFDR
FDR = E(rFDR)
30
© 2005 Thomas Nichols
False Discovery Rate
Illustration:
Noise
Signal
Signal+Noise
31
© 2005 Thomas Nichols
Control of Per Comparison Rate at 10%
11.3% 11.3% 12.5% 10.8% 11.5% 10.0% 10.7% 11.2% 10.2%
Percentage of Null Pixels that are False Positives
9.5%
Control of Familywise Error Rate at 10%
Occurrence of Familywise Error
FWE
Control of False Discovery Rate at 10%
6.7%
10.4% 14.9% 9.3% 16.2% 13.8% 14.0% 10.5% 12.2%
Percentage of Activated Pixels that are False Positives
© 2005 Thomas Nichols
8.7%
32
Benjamini & Hochberg
Procedure
• Select desired limit q on FDR
• Order p-values, p(1) p(2) ... p(V)
• Let r be largest i such that
1
JRSS-B (1995)
57:289-300
p(i) i/V q
p-value
i/V q
0
• Reject all hypotheses
corresponding to
p(1), ... , p(r).
p(i)
0
1
i/V
33
© 2005 Thomas Nichols
Benjamini & Hochberg
Procedure Details
• Method is valid under smoothness
– Positive Regression Dependency on Subsets
P(X1c1, X2c2, ..., Xkck | Xi=xi) is non-decreasing in xi
• Only required of test statistics for which null true
• Special cases include
– Independence
– Multivariate Normal with all positive correlations
– Same, but studentized with common std. err.
• For arbitrary covariance structure
– Replace q with q c(V)
c(V) = i=1,...,V 1/i log(V)+0.5772
Benjamini &
Yekutieli (2001).
Ann. Stat.
34
29:1165-1188
© 2005 Thomas Nichols
Adaptiveness of
Benjamini & Hochberg FDR
When no
signal:
P-value
threshold
/V
Ordered p-values p(i)
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
Fractional index i/V
1
When all
signal:
P-value
threshold
...FDR adapts to the amount of signal in the data
© 2005 Thomas Nichols
35
FDR Example
• Threshold
– Indep/PosDep
u = 3.83
• Result
– 3,073 voxels above
Indep/PosDep u
– <0.0001 minimum
FDR-corrected
p-value
FWER Perm. Thresh. = 7.67
58 voxels
© 2005 Thomas Nichols
FDR Threshold = 3.83
3,073 voxels
37
Overview
• Multiple Testing Problem
– Which of my 100,000 voxels are “active”?
• Nonparametric Inference
– Can I trust my P-value at this voxel?
• Conjunction Inference
– Is this voxel “active” in all of my tasks?
• Bayesian vs. Classical Inference
– What in the world is a posterior probability?
© 2005 Thomas Nichols
38
Nonparametric
Permutation Test
• Parametric methods
– Assume distribution of
statistic under null
hypothesis
• Nonparametric methods
– Use data to find
distribution of statistic
under null hypothesis
– Any statistic!
5%
Parametric Null Distribution
5%
Nonparametric Null Distribution
39
© 2005 Thomas Nichols
Permutation Test
Toy Example
• Data from V1 voxel in visual stim. experiment
A: Active, flashing checkerboard B: Baseline, fixation
6 blocks, ABABAB Just consider block averages...
A
B
A
B
A
B
103.00
90.48
99.93
87.83
99.76
96.06
• Null hypothesis Ho
– No experimental effect, A & B labels arbitrary
• Statistic
– Mean difference
40
© 2005 Thomas Nichols
Permutation Test
Toy Example
• Under Ho
– Consider all equivalent relabelings
– Compute all possible statistic values
– Find 95%ile of permutation distribution
AAABBB 4.82
ABABAB 9.45
BAAABB -1.48
BABBAA -6.86
AABABB -3.25
ABABBA 6.97
BAABAB 1.10
BBAAAB 3.15
AABBAB -0.67
ABBAAB 1.38
BAABBA -1.38
BBAABA 0.67
AABBBA -3.15
ABBABA -1.10
BABAAB -6.97
BBABAA 3.25
ABAABB 6.86
ABBBAA 1.48
BABABA -9.45
BBBAAA -4.82
44
© 2005 Thomas Nichols
Permutation Test
Toy Example
• Under Ho
– Consider all equivalent relabelings
– Compute all possible statistic values
– Find 95%ile of permutation distribution
-8
© 2005 Thomas Nichols
-4
0
4
8
45
Controlling FWER:
Permutation Test
• Parametric methods
– Assume distribution of
max statistic under null
hypothesis
• Nonparametric methods
5%
Parametric Null Max Distribution
– Use data to find
distribution of max statistic
5%
under null hypothesis
– Again, any max statistic! Nonparametric Null Max Distribution
46
© 2005 Thomas Nichols
Permutation Test
& Exchangeability
• Exchangeability is fundamental
– Def: Distribution of the data unperturbed by permutation
– Under H0, exchangeability justifies permuting data
– Allows us to build permutation distribution
• Subjects are exchangeable
– Under Ho, each subject’s A/B labels can be flipped
• fMRI scans are not exchangeable under Ho
– If no signal, can we permute over time?
– No, permuting disrupts order, temporal autocorrelation
47
© 2005 Thomas Nichols
Permutation Test
& Exchangeability
• fMRI scans are not exchangeable
– Permuting disrupts order, temporal autocorrelation
• Intrasubject fMRI permutation test
– Must decorrelate data, model before permuting
– What is correlation structure?
• Usually must use parametric model of correlation
– E.g. Use wavelets to decorrelate
• Bullmore et al 2001, HBM 12:61-78
• Intersubject fMRI permutation test
– Create difference image for each subject
– For each permutation, flip sign of some subjects
© 2005 Thomas Nichols
48
Permutation Test
Example
• fMRI Study of Working Memory
– 12 subjects, block design
– Item Recognition
Active
D
Marshuetz et al (2000)
• Active:View five letters, 2s pause,
view probe letter, respond
• Baseline: View XXXXX, 2s pause,
view Y or N, respond
UBKDA
Baseline
• Second Level RFX
– Difference image, A-B constructed
for each subject
– One sample, smoothed variance t test
© 2005 Thomas Nichols
yes
N
XXXXX
no
52
Permutation Test
Example
• Permute!
– 212 = 4,096 ways to flip 12 A/B labels
– For each, note maximum of t image
.
Permutation Distribution
Maximum t
© 2005 Thomas Nichols
Maximum Intensity Projection
53
Thresholded t
Permutation Test
Example
• Compare with Bonferroni
– = 0.05/110,776
• Compare with parametric RFT
– 110,776 222mm voxels
– 5.15.86.9mm FWHM smoothness
– 462.9 RESELs
54
© 2005 Thomas Nichols
uPerm = 7.67
58 sig. vox.
t11 Statistic, Nonparametric Threshold
uRF = 9.87
uBonf = 9.80
5 sig. vox.
t11 Statistic, RF & Bonf. Threshold
378 sig. vox.
Test Level vs. t11 Threshold
© 2005 Thomas Nichols
Smoothed Variance t Statistic,
Nonparametric Threshold 55
Does this Generalize?
RFT vs Bonf. vs Perm.
Verbal Fluency
Location Switching
Task Switching
Faces: Main Effect
Faces: Interaction
Item Recognition
Visual Motion
Emotional Pictures
Pain: Warning
Pain: Anticipation
© 2005 Thomas Nichols
df
4
9
9
11
11
11
11
12
22
22
RF
0
0
4
127
0
5
626
0
127
74
No. Significant Voxels
(0.05 Corrected)
t
SmVar t
Bonf Perm
Perm
0
0
0
0
158
354
6
2241
3447
371
917
4088
0
0
0
5
58
378
1260
1480
4064
0
0
7
116
221
347
55
182
402
Overview
• Multiple Testing Problem
– Which of my 100,000 voxels are “active”?
• Nonparametric Inference
– Can I trust my P-value at this voxel?
• Conjunction Inference
– Is this voxel “active” in all of my tasks?
• Bayesian vs. Classical Inference
– What in the world is a posterior probability?
© 2005 Thomas Nichols
58
Conjunction Inference
• Consider several working memory tasks
–
–
–
–
N-Back tasks with different stimuli
Letter memory:
D J PF D RAT F M R I B K
Number memory: 4 2 8 4 4 2 3 9 2 3 5 8 9 3 1 4
Shape memory:
• Interested in stimuli-generic response
– What areas of the brain respond to all 3 tasks?
– Don’t want areas that only respond in 1 or 2 tasks
59
© 2005 Thomas Nichols
Conjunction Inference
• For working memory example, K=3...
– Letters
– Numbers
– Shapes
H1
H2
H3
T1
T2
T3
– Test
H 0 : {H 1 0} {H 2 0} {H 3 0}
• At least one of the three effects not present
– versus
H A : {H 1 1} {H 2 1} {H 3 1}
• All three effects present
61
© 2005 Thomas Nichols
Conjunction Inference
Methods: Friston et al
• Use the minimum of the K statistics
– Idea: Only declare a conjunction if all of the
statistics are sufficiently large
– min Tk u only when Tk u for all k
k
64
© 2005 Thomas Nichols
Valid Conjunction Inference
With the Minimum Statistic
• For valid inference, compare min stat to u
– Assess mink Tk image as if it were just T1
– E.g. u0.05=1.64 (or some corrected threshold)
• Equivalently, take intersection mask
– Thresh. each statistic image at, say, 0.05 FWE corr.
– Make mask: 0 = below thresh., 1 = above thresh.
– Intersection of masks: conjunction-significant voxels
71
© 2005 Thomas Nichols
Overview
• Multiple Testing Problem
– Which of my 100,000 voxels are “active”?
• Nonparametric Inference
– Can I trust my P-value at this voxel?
• Conjunction Inference
– Is this voxel “active” in all of my tasks?
• Bayesian vs. Classical Inference
– What in the world is a posterior probability?
© 2005 Thomas Nichols
72
Classical Statistics: Model
• Estimation
Likelihood of Y
p(Y|)
– n = 12 subj. fMRI study
• Data at one voxel
– Y, sample average
% BOLD change
Y
• Model
– Y ~ N(, /√n)
– is true population
mean BOLD % change
– Likelihood p(Y|)
• Relative frequency of
observing Y for one
given value of
© 2005 Thomas Nichols
73
Classical Statistics: MLE
• Estimating
Likelihood of Y
p(Y|)
– Don’t know in
practice
• Maximum
Likelihood
Estimation
– Find that makes
data most likely
– The MLE ( ˆ ) is
our estimate of
© 2005 Thomas Nichols
Y
ˆ y
Actual y
observed in the
experiment
– Here, the MLE of the
population mean is
simply the BOLD
74
sample mean, y
Classical Statistical Inference
Likelihood of Y
p(Y|)
• Level 95%
Confidence Interval
– Y ± 1.96/√n
– With many
replications of the
experiment, CI will
contain 95% of
the time
CI observed
Y
75
© 2005 Thomas Nichols
Classical Statistics Redux
• Grounded in long-run frequency of observable
phenomena
– Data, over theoretical replications
– Inference: Confidence intervals, P-values
• Estimation based on likelihood
• Parameters are fixed
– Can’t talk about probability of parameters
– P( Pop mean > 0 ) ???
• True population mean % BOLD is either > 0 or not
• Only way to know is to scan everyone in population
76
© 2005 Thomas Nichols
Bayesian Statistics
• Grounded in degrees of belief
– “Belief” expressed with the grammar of
probability
– No problem making statements about
unobservable parameters
• Parameters are regarded random, not fixed
• Data is regarded as fixed, since you only have one
dataset
77
© 2005 Thomas Nichols
Bayesian Essentials
• Prior Distribution
– Expresses belief on parameters before seeing the data
• Likelihood
– Same as with Classical
• Posterior Distribution
– Expresses belief on parameters after the seeing the data
• Bayes Theorem
– Tells how to combine prior with likelihood (data) to
create posterior
Posterior
p( | y)
© 2005 Thomas Nichols
Likelihood
p( y | ) p( )
p( y | ' ) p( ' )d '
Prior
p( y | ) p( )
78
Bayesian Statistics:
From Prior to Posterior
• Prior p( )
– ~ N(0 , )
– 0 = 0 %: a priori belief
that activation & deactivation are equally
likely
– = 1 % : a priori
belief that activation is
small
• Data: y = 5 %
• Posterior
Posterior
Likelihood
Prior
0
-5
0
5
10
Population Mean % BOLD Change
– Somewhere between
prior and likelihood
79
© 2005 Thomas Nichols
Bayesian Statistics:
Posterior Inference
• All Inference based
on posterior
• E.g. Posterior Mean
(instead of MLE)
1
1
2
2
21/ n
0
1
2 /n
1
2
21/ n
– Weighted sum of
prior & data mean
– Weights based on
prior & data
precision
© 2005 Thomas Nichols
Posterior
Likelihood
Prior
y
0
-5
0
5
10
Population Mean % BOLD Change
Prior
Mean 0
Posterior
Mean
y Data
(Sample
mean)
80
Bayesian Inference:
Posterior Inference
• But posterior is just another distribution
– Can ask any probability question
• E.g. “What’s the probability, after seeing the
data, that > 0”, or P( > 0 | y )
– Here P( > 0 | y ) ≈ 1
• “Credible Intervals”
– Here 4 ± 0.9 has
95% posterior prob.
– No reference to
repetitions of the
experiment
Posterior
0
-5
0
5
81
Population Mean % BOLD Change
© 2005 Thomas Nichols
10
Bayesian vs. Classical
• Foundations
– Classical
How observable statistics behave in long-run
– Bayesian
Measuring belief about unobservable parameters
• Inference
– Classical
References other possible datasets not observed
• Requires awkward explanations for CI’s & P-values
– Bayesian
Based on posterior, combination of prior and data
• Allows intuitive probabilistic statements (posterior probabilities)
82
© 2005 Thomas Nichols
Bayesian vs. Classical
• Bayesian Challenge: Priors
– I can set my prior to always find a result
– “Objective” priors can be found; results then often
similar to Classical inference
• When are the two similar?
– When n large, the prior can be overwhelmed by
likelihood
– One-sided P-value ≈ Posterior probability of > 0
– Doesn’t work with 2-sided P-value!
[ P( 0 | y ) = 1 ]
83
© 2005 Thomas Nichols
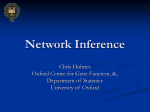
Bayesian vs. Classical
SPM T vs SPM PPM
• Auditory experiment
contrast(s)
<
SPM{T
SPMresults:
Height threshold T = 5.50
Extent threshold k = 0 voxels
SPM:
Voxels with T > 5.5
39.0
}
SPMmip
[0, 0, 0]
<
1
4
7
10
13
16
19
22
25
28
31
34
37
40
43
46
49
52
55
60
<
SPMresults:
1
4
7 10 13 16 19 22
Design matrix
Height threshold P = 0.95
Extent threshold k = 0 voxels
PPM 2.06
4
<
3
<
SPM mip
[0, 0, 0]
<
contrast(s)
1
4
7
10
13
16
19
22
25
28
31
34
37
40
43
46
49
52
55
60
1
4
7 10 13 16 19 22
Design matrix
PPM:
Voxels with Posterior Probability > 0.95
• Qualitatively similar, but hard to equate thresholds
84
© 2005 Thomas Nichols
Slide: Alexis Roche, CEA, SHFJ
Conclusions
• Multiple Testing Problem
– Choose a MTP metric (FDR, FWE)
– Use a powerful method that controls the metric
• Nonparametric Inference
– More power for small group FWE inferences
• Conjunction Inference
– Use intersection mask, or treat mink Tk as single T
• Bayesian Inference
– Conceptually different, but simpler than Classical
– Priors controversial, but objective ones can be used
© 2005 Thomas Nichols
85
References
• Multiple Testing Problem
–
–
–
Worsley, Marrett, Neelin, Vandal, Friston and Evans, A Unified Statistical Approach for Determining
Significant Signals in Images of Cerebral Activation. Human Brain Mapping, 4:58-73, 1996.
Nichols & Hayasaka, Controlling the Familywise Error Rate in Functional Neuroimaging: A Comparative
Review. Statistical Methods in Medical Research, 12:419-446, 2003.
CR Genovese, N Lazar and TE Nichols. Thresholding of Statistical Maps in Functional Neuroimaging Using
the False Discovery Rate. NeuroImage, 15:870-878, 2002.
• Nonparametric Inference
–
–
TE Nichols and AP Holmes. Nonparametric Permutation Tests for Functional Neuroimaging: A Primer with
Examples. Human Brain Mapping, 15:1-25, 2002.
Bullmore, Long and Suckling. Colored noise and computational inference in neurophysiological (fMRI) time
series analysis: resampling methods in time and wavelet domains. Human Brain Mapping, 12:61-78, 2001.
• Conjunction Inference
–
–
TE Nichols, M Brett, J Andersson, TD Wager, J-B Poline. Valid Conjunction Inference with the Minimum
Statistic. NeuroImage, 2005.
KJ Friston, WD Penny and DE Glaser. Conjunction Revisited. NeuroImage, NeuroImage 25:661– 667, 2005.
• Bayesian Inference
–
–
–
L.R. Frank, R.B. Buxton, E.C. Wong. Probabilistic analysis of functional magnetic resonance imaging data.
Magnetic Resonance in Medicine, 39:132–148, 1998.
Friston,, Penny, Phillips, Kiebel, Hinton and Ashbuarner, Classical and Bayesian inference in neuroimagining:
theory. NeuroImage, 16: 465-483, 2002. (See also, 484-512)
Woolrich, M., Behrens, T., Beckmann, C., Jenkinson, M., and Smith, S. (2004). Multi-Level Linear Modelling
for FMRI Group Analysis Using Bayesian Inference. NeuroImage, 21(4):1732-1747
86
© 2005 Thomas Nichols