Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
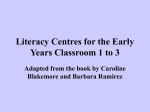
CSC 550: Introduction to Planning Fall 2004 Goals: 1. Defining Planning 2. Early planning systems 3. Types of Planning and their challenges: - Hierarchical - Non-Hierarchical, - Other common approaches 4. Current Projects and challenges Definition of Planning • Planning is reasoning about future events in order to establish a series of actions to accomplish a goal. - A common approach to planning is representing a current state and determining the series of actions necessary to reach the goal state. (or vice versa) – Problem solving technique – Plans are created by searching through a space of possible actions until the sequence necessary to accomplish the task is discovered. • Planning is a specific kind of state space search • Deals with steps and goals that interact – Initial State and Goal State (Next Slide)- Hallmark example with blocks Initial State and Goal State These two diagrams show the initial state and goal state for a simple planning problem. The purpose of planning is to find a sequence of actions that gets from the initial state to the goal state, or from the goal state back to the initial state. Possible Solution: Pickup(c),Table(c), Pickup(b), PlaceOn(c), Pickup(a), PlaceOn(b) Search in Planning • Planning involves search through a search space – Progression: choose an action whose preconditions are met until a goal state is reached • A forward approach, simple algorithm, but can have large branching factor – Regression: choose an action that matches an unachieved subgoal while adding unmet preconditions to the set of subgoals. Continue until the set of subgoals is empty. • A backward approach, goal oriented, tends to be more efficient Linear and Non-Linear • Linear – Solving one goal at a time with a stack of unachieved goals, subgoals are solved in the same order as the actions of the plan to be executed – Depth-first search • Non-Linear – Solving subgoals that are in a set of unachieved goals, can solve parallel branches of the set of goals arbitrarily. – Breadth-first search – Tends to avoid backtracking – More flexible execution – Representing plans and search algorithms are more complex than linear Definition of Planning, cont. – Applications in robotics, expert systems, manufacturing, and natural language understanding • Expert System – reasoning about events occurring over time • Manufacturing – process control • Robotics – organization of partial plans in a solution • Natural Language – human interactions, goal oriented Definition of Planning, cont. - Potential Benefits of Planning • • • • Helps to solve large problems quickly Find better solutions Can resolve goal conflicts Can provide methods for error recovery – General Limitations • Complexity of state spaces, must represent the whole environment, search can become exponentially large • Frame Problem- being able to represent what changes and what remains unchanged following an action (by default, things stay the same, unless you tell it otherwise) • Inconsistencies between the real world and the program model, comes back to the complexity issue Early Planning Systems 1956 – Logic Theorists – Newell, Shaw, and Simon - One of the first to use heuristics, proved theorems in propositional calculus, operated by using backward reasoning from the theorem to the axioms - limited by its heuristics and certain theorems could not be proven 1957-1969 – GPS – Newell, Shaw, and Simon - The General Problem Solver, how to solve human intelligence problems, areas – propositional calculus proofs, puzzles, symbolic integrations, etc. - Introduced means-end analysis which tried to find the difference between the current state and goal, then used a table to find an action to minimize the difference between the two states. Non-Hierarchical Planners • Earliest Method of Planning – Made no distinction between more and less important plan elements – Slowed by getting hung up on less important elements – Lack of structure led to poor performance with complex problems – Example: STRIPS • STanford Research Institute Planning System • 1971 by Fikes and Nilsson • Used to run the SHAKEY robot of the 1970’s – The block example STRIPS • Goal states are maintained on a stack • If the top goal on the stack matches the current state, the goal is removed from the stack • Also adds to the goal stack any sub-goals found while trying to get to the goal state • Initial State (On(C,A) and OnTable(B)) and Goal State (On(C,B) and On(A,C)) STRIPS This diagram is an example of a STRIPS search graph with goal stacks included. The goal state is On(A,C) ^ On(C,B). STRIPS STRIPS • Problems – Does not always find the optimal solution (Ex: On(A,B) before On(B,C)) – Some simple problems that cannot be solved: switching the contents of two registers – Cannot tell the difference between important information and details – No guidelines to tell it what to do first – Cannot know when it is going down a bad path – Memory Goal Stack and Start State • Next slide Current State State Description 1 CONT(X,A) Goal Stack CONT(X,B) ^ CONT(Y,A) CONT(Y,B) CONT(Z,0) 2 3 CONT(X,A) CONT(X,B) CONT(Y,B) CONT(Y,A) CONT(Z,0) CONT(X,B) ^ CONT(Y,A) CONT(X,A) CONT(r,B) ^ CONT(X,t) CONT(Y,B) Assign(X,r,t,B) CONT(Z,0) CONT(Y,A) CONT(X,B) ^ CONT(Y,A) 4 CONT(X,B) CONT(Y,A) CONT(Y,B) CONT(X,B) ^ CONT(Y,A) CONT(Z,0) At State 3, the program sees the goal CONT(X,B) can be completed. The problem is the contents of Y are never copied into Z and is lost. At State 4, the goal cannot be met due to A being lost. - An example of subgoals that conflict Hierarchical Planners • Makes a distinction between more and less important parts of the plan – Example: When purchasing a new Jesuit statue, we first need to decide where to get the funds. It doesn’t make sense to find a good place for it on campus before you have the money. – Example: ABSTRIPS – 1974 – Sacerdoti • Abstract-Based STRIPS • Like STRIPS but plans in a hierarchy, greatly reduces search space, and is more efficient at solving large problems • Certain preconditions are judged as more important than others by adding weights to those elements • Finds early recognition of bad paths and gets rid of wasted search • Uses a hierarchy of abstraction levels • Solves highest level of abstraction. If that passes, it increases level of detail ABSTRIPS Example: PUSH-THRU-DOOR (bx, dx, rx) Preconditions: 6 PUSHABLE (bx) 6 IS-A (dx, DOOR) 6 IS-A (rx, ROOM) 2 STATUS (dx, OPEN) 1 NEXT-TO (bx, dx) 1 NEXT-TO (ROBOT, bx) Each number represents the weight of the element. We see that the elements with weight 6 are the first elements we need to know in order to get to the goal state. Common Approaches Opportunistic Planning - Situation-based triggering of new goals, subgoals, and/or partial plans - Implementation is a bottom-up approach, whereas Hierarchical planners start with the goal and move down Resource-Sensitive Planning - Takes into account the resources available and the cost involved in plans - Interval Logic, James Allen-1983 - A system which represents actions where timing is important - Uses time interval relations (before, meets, overlaps, during, etc.) - Links are made between actions that satisfy interval relations Conditional and Uncertainty Planning - Deals with information that is incomplete, devises generic plans that leave out specifics, details are filled in later - Emphasis on uncertainty in real world applications Current Research Focus • Emphasis on Hierarchical Planning with special consideration given to: – Complex Conditions – Availability of Resources – Uncertainty • More practical approaches considering the complex world that we live in. - Biggest difficulty is in the representation of complex states and actions - Problems also arise as complexity leads to a sometimes exponentially increased search Classical Planning Assumptions • • • • • • Perfect Information Deterministic Effects Instantaneous Execution Solo Agent No concern over time, cost, resources Etc. These assumptions were made early on because complex tasks were too complex to solve. These assumptions were used to complete smaller tasks (blocks). Modern approaches deal with the scaling issue. Recent Projects • ASPEN – Automated Scheduling and Planning ENvironment – – – – – NASA application Used for mission design Surface rover planning Ground antenna utilization NASA operators send goals to ASPEN, then ASPEN sends commands to the spacecraft, ASPEN continually receives updates from the spacecraft and the current plan is updated to reflect the necessary environmental changes • PLANET – Applications: workflow management, intelligent manufacturing, robot planning, aerospace and airline planning • EXCULIBUR – Computer gaming environment – Pursue their given goals and adapt to new opponents – Dynamic nature of games, uncertainty Sources of Information • • • • • • • • • • • Luger, George F., Artificial Intelligence: Structures and Strategies For Complex Problem Solving, Fourth Edition, Pearson Education Limited 2002. Nilsson, Nils J. Principles of Artificial Intelligence, Tioga Publishing Co., 1980. Shirai, Yoshiaki and Tsujii, Jun-ichi, Artificial Intelligence: Concepts Techniques, and Applications, Iwanami Shoten, Publishers, Tokyo, 1982. http://www.cs.washington.edu/ai/#PLAN http://www.cs.dartmouth.edu/~brd/Teaching/AI/Lectures/Summaries/plannin g.html www.cs.bham.ac.uk/~mmk/Teaching/Planning/l6.html www.cs.umbc.edu/671/fall03/slides/25 http://www-2.cs.cmu.edu/~reids/planning/handouts/ReprSearch.pdf http://vitalstatistix.nicve.salford.ac.uk/planet2/desc.html http://www.ai-center.com/projects/excalibur/goals.html http://www-aig.jpl.nasa.gov/public/planning/projects/current.html