Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
External Memory Data Structures
Srinivasa Rao Satti
Workshop on Recent Advances in Data Structures
December 20, 2011
Fundamental Algorithmic Problems
• Searching: Given a list (sequence) L of elements x1, x2, .., xn
and query element x, check whether x is present in L.
– When L is not sorted, we use linear search – scan the list to
check if x is present in it.
– When L is sorted, we use binary search – divide the remaining
list to be searched in half with every comparison.
Also insert and delete elements to/from L.
• Sorting: Given a sequence of elements, sort them in increasing (or
decreasing) order.
– Insertion sort, bubble sort, quick sort, merge sort
2
Random Access Machine (RAM) Model
• Standard theoretical model of computation:
– Infinite memory
– Uniform access cost
R
A
M
• Unit-cost RAM model: All the basic operations (reading/writing a
location from/to the memory, standard arithmetic and Boolean
operations) take one unit of time.
• Simple model crucial for success of computer industry.
3
Hierarchical Memory
L
1
L
2
R
A
M
• Modern machines have complicated memory hierarchy
– Levels get larger and slower further away from CPU
– Data moved between levels using large blocks
4
Hard disk drive
5
Slow I/O
• Disk access is 106 times slower than main memory access
track
read/write head
read/write
arm
“The difference
in speed
between modern CPU and
disk technologies is
analogous to the difference
in speed in sharpening a
pencil using a sharpener on
magnetic surface
one’s desk or by taking an
airplane to the other side of
– Disk systems try to amortize large access time
largea
the transferring
world and using
contiguous blocks of data (8-16Kbytes)
sharpener on someone else’s
• Important to store/access data to take advantage ofdesk.”
blocks(D.
(locality)
Comer)
6
External Memory Model
D
Block I/O
M
P
[Aggarwal-Vitter 1988]
N = # of items in the problem instance
B = # of items per disk block
M = # of items that fit in main memory
T = # of items in output
I/O: Move block between memory and disk
Performance measures:
Space: # of disk blocks used by the structure
Time: # of I/Os performed by the algorithm
(CPU time is “free”)
8
Scalability Problems: Block Access Matters
• Example: Traversing linked list
– Array size N = 10 elements
– Disk block size B = 2 elements
– Main memory size M = 4 elements (2 blocks)
1 5 2 6 3 8 9 4 7 10
Algorithm 1: N=10 I/Os
1 2 10 9 5 6 3 4 8 7
Algorithm 2: N/B=5 I/Os
• Large difference between N and N/B since block size is large
– Example: N = 256 x 106, B = 8000 , 1ms disk access time
N I/Os take 256 x 103 sec = 4266 min = 71 hr
N/B I/Os take 256/8 sec = 32 sec
9
Queues and Stacks
• Queue:
– Maintain push and pop blocks in main memory
Push
Pop
O(1/B) Push/Pop operations
• Stack:
– Maintain push/pop blocks in main memory
O(1/B) Push/Pop operations
10
Fundamental Bounds
• Scanning:
• Sorting:
• Searching:
Internal
N
N log N
log 2 N
External
N
B
N
B
log M B
N
B
log B N
• Note:
– Linear I/O: O(N/B)
– B factor VERY important:
– Cannot sort optimally with search tree
11
Search trees: API
• Given a set S of keys, support the operations:
– search(x) : return TRUE if x is in S, and FALSE otherwise
– insert(x) : insert x into S (error if x is already in S)
– delete(x) : delete x from S (error if x is not in S)
– rangesearch(x,y) : return all the keys z such that x ≤ z ≤ y
14
Binary Search Trees
• Binary search tree:
– Standard method for search among N elements
– We assume elements in leaves
(log 2 N )
– Search traces a root-to-leaf path
– If nodes are stored arbitrarily on disk
Search in O(log 2 N ) I/Os
Rangesearch in O(log 2 N T ) I/Os
15
External Search Trees
(log 2 B)
(B)
• BFS blocking:
– Block height O(log 2 N ) / O(log 2 B) O(log B N )
– Output elements blocked
Rangesearch in (log B N T B) I/Os
• Optimal: O(N/B) space and (log B N T B) query
16
External Search Trees
• Maintaining BFS blocking during updates?
– Balance is normally maintained in search trees using rotations
x
y
y
x
• Seems very difficult to maintain BFS blocking during rotation
– Also need to make sure output (leaves) is blocked!
17
B-trees
• BFS-blocking naturally corresponds to tree with fan-out (B)
• B-trees balanced by allowing node degree to vary
– Rebalancing performed by splitting and merging nodes
18
(a,b)-tree
• T is an (a,b)-tree (a≥2 and b≥2a-1)
– All leaves on the same level and
contain between a and b elements
– Except for the root, all nodes have
degree between a and b
– Root has degree between 2 and b
(2,4)-tree
• (a,b)-tree uses linear space and has height O(log a N )
Choosing a,b =(B) each node/leaf stored in one disk block
(N/B) space and (log B N T B) query
19
(a,b)-Tree Insert
• Insert:
Search and insert element in leaf v
DO { if v has b+1 elements/children
Split v:
make nodes v’ and v’’ with
b21 b and b21 a elements
insert element (ref) in parent(v)
(make new root if necessary)
v=parent(v) }
v
b 1
v’
v’’
b21 b21
• Insert touches (log a N ) nodes
20
(2,4)-Tree Insert
21
(a,b)-Tree Delete
• Delete:
Search and delete element from leaf v
DO { if v has a-1 elements/children
Fuse v with sibling v’:
move children of v’ to v
delete element (ref) from parent(v)
(delete root if necessary)
If v has >b (and ≤ a+b-1<2b) children split v
v=parent(v) }
v’
v
a -1
v
2a - 1
• Delete touches O(log a N ) nodes
22
(2,4)-Tree Delete
23
Summary/Conclusion: B-tree
• B-trees: (a,b)-trees with a,b = (B)
– O(N/B) space
– O(logB N+T/B) I/Os for search and rangesearch
– O(logB N) I/Os for insert and delete
• B-trees with elements in the leaves sometimes called B+-tree
• Construction in O( NB log M B NB ) I/Os
– Sort elements and construct leaves
– Build tree level-by-level bottom-up
24
B-tree Construction
• In internal memory we can sort N elements in O(N log N) time using
a balanced search tree:
– Insert all elements one-by-one (construct tree)
– Output in sorted order using in-order traversal
• Same algorithm using B-tree use O( N log B N ) I/Os
log MB
– A factor of O( B log B ) non-optimal
• As discussed we could build B-tree bottom-up in O( NB log M B NB ) I/Os
– In general we would like to have dynamic data structure to use in
O( NB log M B NB )algorithms O( 1 log N ) I/O operations
B
M B B
25
Flash memory
30
Flash memory
31
Flash memory
• Non-volatile memory which can be erased and programmed
• Characteristics:
– Lighter
– Provides better shock resistance
– Provides more throughput
– Consumes less power
– More denser (uses less space)
compared to magnetic disks
• Commonly used in digital cameras, handheld computers, mobile
phones, portable music players etc.
• Also used in embedded systems, sensor networks; and even
replacing magnetic disks in PCs.
32
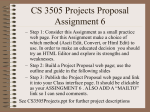
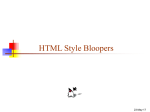
HDD vs SSD
The disassembled components of a hard disk drive (left)
and of the PCB and components of a solid-state drive (right)
33
Limitations of flash memory
• Memory cells in a flash memory device can be written only a
limited number of times
– between 10,000 and 1,000,000, after which they wear out and
become unreliable.
• The only way to set bits (change their value from 0 to 1) is to erase
an entire region memory. These regions have fixed size in a given
device, typically ranging from several kilobytes to hundreds of
kilobytes, and are called erase units.
• Two different types of Flash memories: NOR and NAND
– they have slightly different characteristics
34
Flash memory
• The memory space of the chip is partitioned into blocks called erase
blocks. The only way to change a bit from 0 to 1 is to erase the
entire unit containing the bit.
• Each block is further partitioned into pages, which usually store
2048 bytes of data and 64 bytes of meta-data. Erase blocks typically
contain 32 or 64 pages.
• Bits are changed from 1 to 0 by programming (writing) data onto a
page. An erased page can be programmed only a small number of
times (1 to 3) before it must be erased again.
35
Flash memory
• Reading data takes tens of microseconds for the first access to a
page, plus tens of nanoseconds per byte.
• Writing a page takes hundreds of microseconds, plus tens of
nanoseconds per byte.
• Erasing a block takes several milliseconds.
• Each block can sustain only a limited number of erasures.
Algorithms/data structures designed for I/O model do not always
work well when implemented on flash memory.
36
Flash memory models (I)
• General flash model:
BR
M
c Flash
BW
• The complexity of an algorithm is x + c · y, where x and y are the
number of read and write I/Os respectively, and c is a penalty factor
for writing.
• Typically, we assume that BR < BW << M, and c ≥ 1.
37
Flash memory models (II)
• Unit-cost flash model:
BR
Flash
M
BW
• General flash model augmented with the assumption of an equal
access time per element for reading and writing.
• The cost of an algorithm performing x read I/Os and y write I/Os is
given by x.BR + y.BW.
• This simplifies the model considerably, as it becomes easier to
adapt external-memory results.
38
B-trees on flash memory
• An insertion in a B-tree updates a single leaf (unless the leaf splits)
• Since we cannot perform an in-place update in flash memory, we
need to create a new copy of the leaf, with the new element inserted.
• Since the parent of this leaf has to update its pointer to the leaf, we
need to create a new copy of the parent. And so on..up to the root.
• Thus the write performance is quite bad for the naïve
implementation.
39
Flash Translation Layer (FTL)
• Software layer on the flash disk which performs logical to physical
block mapping.
• Distributes writes uniformly across blocks.
• B-tree with FTL:
– All nodes contain just the logical address of other nodes
– Allows any update to write just the target node
• Achieves one erase per update (amortized)
40
μ-tree
[Kang, Jung, Kang, Kim, 2007]
• Minimally Updated tree
• Achieves similar performance as ‘B-tree with FTL’ on raw flash
• Sizes of the nodes decreases exponentially from leaf to the root
• Each block corresponds to a leaf-to-root path, and stores the nodes
on a prefix of this path
• Works only when log2 B ≥ logB N
41
FD-tree
[Li, He, Yang, Luo, Yi, 2010]
• Flash Disk aware tree index
• Transforms random writes into sequential writes
• Limits random writes to within a small region
42
FD-tree
•Flash Disk aware tree index
•Transforms random writes into sequential writes
•Contains a head tree and a few levels of sorted runs of increasing sizes
•O(logk N) levels, where k is the size ratio between levels
43
Other B-tree indexes for flash memory
• BFTL [Wu, Luo, Chang, 2007]
• Lazy Adaptive tree [Agrawal, Ganesan, Sitaraman, Diao, Singh,
2009]
• Lazy Update tree [On, Hu, Li, Xu, 2009]
• In-page Logging approach [Lee, Moon, 2007]
• …
All these are designed to get better practical performance, and take
different aspects of flash characteristics into consideration.
-- not easy to compare with each other
44
Comparison of tree indexes on flash
N – number of elements
BR – read block size
BW – write block size
BU – size of buffer
h – height of the tree
k - parameter
45
Directions for further research
• The area is still in its infancy.
• Not much is work has been done apart from the development of
some file systems and tree indexing structures
• Open problems:
– Efficient tree indexes for flash memory
– Tons of other (practically significant) algorithmic problems
– Better memory model.
46
Thank You
47