Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
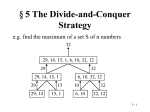
A simple example
• finding the maximum of a set S of n numbers
Time complexity
• Time complexity:
T(n)=
2T(n/2)+1 , n>2
1
, n2
• Calculation of T(n):
Assume n = 2k,
T(n)
= 2T(n/2)+1
= 2(2T(n/4)+1)+1
= 4T(n/4)+2+1
:
k-1
=2 T(2)+2k-2+…+4+2+1
=2k-1+2k-2+…+4+2+1
=2k-1 = n-1
A general divide-and-conquer
algorithm
Step 1: If the problem size is small, solve this
problem directly; otherwise, split the
original
problem into 2 sub-problems
with equal
sizes.
Step 2: Recursively solve these 2 sub-problems
by applying this algorithm.
Step 3: Merge the solutions of the 2 subproblems into a solution of the original
problem.
Time complexity of the general
algorithm
• Time complexity:
T(n)=
2T(n/2)+S(n)+M(n) , n c
b
,n<c
where S(n) : time for splitting
M(n) : time for merging
b : a constant
c : a constant
• e.g. Binary search
• e.g. quick sort
• e.g. merge sort
Divide and Conquer
• Divide-and-conquer method for algorithm design:
– Divide: if the input size is too large to deal with in a
straightforward manner, divide the problem into two or
more disjoint subproblems
– Conquer: use divide and conquer recursively to solve the
subproblems
– Combine: take the solutions to the subproblems and
“merge” these solutions into a solution for the original
problem
Recurrences
• Running times of algorithms with Recursive calls
can be described using recurrences
• A recurrence is an equation or inequality that
describes a function in terms of its value on
smaller inputs
solving_trivial_problem
if n 1
T ( n)
num_pieces T (n / subproblem_size_factor) dividing combining if n 1
• Example: Merge Sort
(1)
if n 1
T ( n)
2T (n / 2) (n) if n 1
Solving Recurrences
• Repeated substitution method
– Expanding the recurrence by substitution and noticing
patterns
• Substitution method
– guessing the solutions
– verifying the solution by the mathematical induction
• Recursion-trees
• Master method
– templates for different classes of recurrences
Repeated Substitution Method
• Let’s find the running time of merge sort (let’s
assume that n=2b, for some b).
1
if n 1
T ( n)
2T (n / 2) n if n 1
T (n) 2T n / 2 n
substitute
2 2T n / 4 n / 2 n expand
22 T (n / 4) 2n substitute
22 (2T (n /8) n / 4) 2n expand
23 T (n /8) 3n
observe the pattern
T (n) 2i T (n / 2i ) in
2lg n T (n / n) n lg n n n lg n
Repeated Substitution Method
• The procedure is straightforward:
–
–
–
–
–
–
Substitute
Expand
Substitute
Expand
…
Observe a pattern and write how your expression looks
after the i-th substitution
– Find out what the value of i (e.g., lgn) should be to get
the base case of the recurrence (say T(1))
– Insert the value of T(1) and the expression of i into
your expression
Integer Multiplication
• Algorithm: Multiply two n-bit integers I and J.
– Divide step: Split I and J into high-order and low-order bits
I I h 2n / 2 I l
J J h 2n / 2 J l
– We can then define I*J by multiplying the parts and adding:
I * J ( I h 2n / 2 I l ) * ( J h 2n / 2 J l )
I h J h 2n I h J l 2n / 2 I l J h 2n / 2 I l J l
– So, T(n) = 4T(n/2) + n, which implies T(n) is O(n2).
– But that is no better than the algorithm we learned in grade
school.
An Improved Integer Multiplication
Algorithm
• Algorithm: Multiply two n-bit integers I and J.
– Divide step: Split I and J into high-order and low-order bits
I I h 2n / 2 I l
J J h 2n / 2 J l
– Observe that there is a different way to multiply parts:
I * J I h J h 2 n [( I h I l )( J l J h ) I h J h I l J l ]2 n / 2 I l J l
I h J h 2 n [( I h J l I l J l I h J h I l J h ) I h J h I l J l ]2 n / 2 I l J l
I h J h 2 n ( I h J l I l J h )2 n / 2 I l J l
– So, T(n) = 3T(n/2) + n, which implies T(n) is O(nlog23), by the Master
Theorem.
– Thus, T(n) is O(n1.585).
Matrix multiplication
• Let A, B and C be n n matrices
C = AB
C(i, j) = A(i, k)B(k, j)
1 k n
• The straightforward method to perform a
matrix multiplication requires O(n3) time.
Divide-and-conquer approach
• C = AB
C11 C12 = A11 A12
C21 C22 = A21 A22
B11 B12
B21 B22
C11 = A11 B11 + A12 B21
C12 = A11B12 + A12 B22
C21 = A21 B11 + A22 B21
C22 = A21 B12 + A22 B22
• Time complexity:
(# of additions : n2)
We get T(n) = O(n3)
T(n)
=
b
,n2
8T(n/2)+cn2 , n > 2
Strassen’s matrix multiplicaiton
• P = (A11 + A22)(B11 + B22)
Q = (A21 + A22)B11
R = A11(B12 - B22)
S = A22(B21 - B11)
T = (A11 + A12)B22
U = (A21 - A11)(B11 + B12)
V = (A12 - A22)(B21 + B22).
• C11 = P + S - T + V
C12 = R + T
C21 = Q + S
C22 = P + R - Q + U
Time complexity
• 7 multiplications and 18 additions or subtractions
• Time complexity:
T(n)
=
b
,n2
7T(n/2)+an2 , n > 2
T(n) = an2 + 7T(n/2)
= an2 + 7(a(n/2)2 + 7T(n/4))
= an2 + (7/4)an2 + 72T(n/4)
=…
:
= an2(1 + 7/4 + (7/4)2+…+(7/4)k-1+7kT(1))
cn2(7/4)log2n+7log2n, c is a constant
= cnlog24+log27-log24 +nlog27
= O(nlog27)
O(n2.81)
Median Finding
• Given a set of "n" unordered numbers we want to
find the "k th" smallest number. (k is an integer
between 1 and n).
A Simple Solution
• A simple sorting algorithm like heapsort will take Order of
O(nlg2n) time.
Step
Sort n elements using heapsort
Return the kth smallest element
Total running time
Running Time
O(nlog2n)
O(1)
O(nlog2n)
Linear Time selection algorithm
• Also called Median Finding Algorithm.
• Find k th smallest element in O (n) time in
worst case.
• Uses Divide and Conquer strategy.
• Uses elimination in order to cut down the
running time substantially.
Steps to solve the problem
• Step 1: If n is small, for example n<6, just sort
and return the kth smallest number in constant
time i.e; O(1) time.
• Step 2: Group the given number in subsets of
5 in O(n) time.
• Step3: Sort each of the group in O (n) time.
Find median of each group.
• Given a set
(……..2,5,9,19,24,54,5,87,9,10,44,32,21,13,24,
18,26,16,19,25,39,47,56,71,91,61,44,28………)
having n elements.
Arrange the numbers in groups of five
………………..
………………..
………………..
………………..
………………..
2
5
54
44
4
25
5
32
18
39
21
26
47
………………..
………………..
………………..
9
87
19
9
13
16
56
………………..
24
10
2
19
71
………………..
Find median of N/5 groups
………………..
………………..
………………..
………………..
………………..
2
5
5
2
4
9
13
16
25
39
………………..
………………..
………………..
9
10
21
18
47
19
54
32
19
56
………………..
24
87
44
26
71
………………..
Median of each group
Find the Median of each group
………………..
3.n/10
………………..
………………..
………………..
………………..
2
5
5
2
4
25
9
13
16
39
………………..
………………..
………………..
9
10
21
18
47
19
54
32
19
56
………………..
24
87
44
26
71
………………..
Find m ,the median of medians
Find the sets L and R
• Compare the n-1 elements with the median m and find two sets L and
R such that every element in L is smaller than m and every element in
R is greater than m.
m
L
3n/10<L<7n/10
R
3n/10<R<7n/10
Description of the Algorithm step
• If n is small, for example n<6, just sort and return the k the smallest
number.(time- 7)
• If n>5, then partition the numbers into groups of 5.(time n)
• Sort the numbers within each group. Select the middle elements (the
medians). (time- 7n/5)
• Call your "Selection" routine recursively to find the median of n/5
medians and call it m. (time-Tn/5)
• Compare all n-1 elements with the median of medians m and determine
the sets L and R, where L contains all elements <m, and R contains all
elements >m. Clearly, the rank of m is r=|L|+1 (|L| is the size of L) (timen)
Contd….
• If k=r, then return m
• If k<r, then return k th smallest of the set L .(time T7n/10)
• If k>r, then return k-r th smallest of the set R.
Recursive formula
• T (n)=O(n) + T(n/5) +T(7n/10)
We will solve this equation in order to get the complexity.
We assume that T (n)< C*n
T (n)= a*n + T (n/5) + T (7n/10)
<= C*n/5+ C*7*n/10 + a*n
<= C*n
if 9*C/10 +a <= C
Which implies C >= 10*a
Hence 10*a*n satisfies the recurrence and so T(n) is O(n)
2-D ranking finding
• Def: Let A = (a1,a2), B = (b1,b2). A dominates B iff a1> b1
and a2 > b2
• Def: Given a set S of n points, the rank of a point x is the
number of points dominated by x.
D
B
A
C
E
rank(A)= 0 rank(B) = 1 rank(C) = 1
rank(D) = 3 rank(E) = 0
Straightforward algorithm:
compare all pairs of points : O(n2)
Divide-and-conquer 2-D ranking finding
Input: A set S of planar points P1,P2,…,Pn
Output: The rank of every point in S
Step 1: (Split the points along the median line L into A and B.)
a. If S contains only one point, return its rank as 0.
b. Else, choose a cut line L perpendicular to the x-axis such that n/2
points of S have x-values L (call this set of points A) and the
remainder points have x-values L(call this set B). Note that L is a
median x-value of this set.
Step 2:
Find ranks of points in A and ranks of points in B, recursively.
Step 3:
Sort points in A and B according to their y-values.
Scan these points sequentially and determine, for each point in B, the
number of points in A whose y-values are less than its y-value. The
rank of this point is equal to the rank of this point among points in B,
plus the number of points in A whose y-values are less than its y-value.
time complexity : step 1 : O(n)
step 3 : O(n log n)
(finding median)
(sorting)
total time complexity :
T(n) 2T( n ) + c1 n log n + c2 n
2
2T( n )
2
4T( n )
4
+ c n log n
+ c n log n + c n log n
2
nT(1) + c(n log n + n log n +n log n +…+n log 2)
2
cn
log
n
nT(1) +
2
4
2-D maxima finding problem
• Def : A point (x1, y1) dominates (x2, y2) if x1 > x2
and y1 > y2. A point is called a maxima if no other
point dominates it
• Straightforward method : Compare every pair of
points.
Time complexity:
O(n2)
Divide-and-conquer for maxima
finding
The maximal points of SL and SR
The algorithm:
• Input: A set of n planar points.
• Output: The maximal points of S.
Step 1: If S contains only one point, return it as the
maxima. Otherwise, find a line L perpendicular to
the X-axis which separates the set of points into
two subsets SLand SR , each of which consisting of
n/2 points.
Step 2: Recursively find the maximal points of SL
and SR .
Step 3: Find the largest y-value of SR. Project the
maximal points of SL onto L. Discard each of the
maximal points of SL if its y-value is less than the
largest y-value of SR .
• Time complexity: T(n)
Step 1: O(n)
Step 2: 2T(n/2)
Step 3: O(n)
T(n)=
2T(n/2)+O(n)+O(n)
1
Assume n = 2k
T(n) = O(n log n)
,n>1
,n=1
The closest pair problem
• Given a set S of n points, find a pair of points which
are closest together.
2-D version
• 1-D version :
Solved by sorting
Time complexity :
O(n log n)
• at most 6 points in area A:
The algorithm:
• Input: A set of n planar points.
• Output: The distance between two closest points.
Step 1: Sort points in S according to their y-values
and x-values.
Step 2: If S contains only two points, return infinity
as their distance.
Step 3: Find a median line L perpendicular to the Xaxis to divide S into two subsets, with equal sizes,
SL and SR.
Step 4: Recursively apply Step 2 and Step 3 to solve
the closest pair problems of SL and SR. Let dL(dR)
denote the distance between the closest pair in SL
(SR). Let d = min(dL, dR).
Step 5: For a point P in the half-slab bounded by L-d
and L, let its y-value by denoted as yP . For each
such P, find all points in the half-slab bounded by
L and L+d whose y-value fall within yP +d and yP d. If the distance d between P and a point in the
other half-slab is less than d, let d=d . The final
value of d is the answer.
• Time complexity: O(n log n)
Step 1: O(n log n)
Steps 2~5:
T(n)=
2T(n/2)+O(n)+O(n) , n > 1
1
,n=1
T(n) = O(n log n)
The convex hull problem
concave polygon:
convex polygon:
• The convex hull of a set of planar points is the
smallest convex polygon containing all of the points.
• The divide-and-conquer strategy to solve
the problem:
•
The merging procedure:
1.
2.
Select an interior point p.
There are 3 sequences of points which have
increasing polar angles with respect to p.
(1) g, h, i, j, k
(2) a, b, c, d
(3) f, e
Merge these 3 sequences into 1 sequence:
g, h, a, b, f, c, e, d, i, j, k.
Apply Graham scan to examine the points one by
one and eliminate the points which cause reflexive
angles.
3.
4.
• e.g. points b and f need to be deleted.
Final result:
Divide-and-conquer for convex hull
• Input : A set S of planar points
• Output : A convex hull for S
Step 1: If S contains no more than five points, use
exhaustive searching to find the convex hull and
return.
Step 2: Find a median line perpendicular to the X-axis
which divides S into SL and SR ; SL lies to the left of
SR .
Step 3: Recursively construct convex hulls for SL and SR.
Denote these convex hulls by Hull(SL) and Hull(SR)
respectively.
• Step 4: Apply the merging procedure to merge
Hull(SL) and Hull(SR) together to form a convex hull.
• Time complexity:
T(n) = 2T(n/2) + O(n)
= O(n log n)
The Fast Fourier Transform
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Outline
•
•
•
•
Polynomial Multiplication Problem
Primitive Roots of Unity
The Discrete Fourier Transform
The FFT Algorithm
Polynomials
• Polynomial:
p ( x ) 5 2 x 8 x 2 3x 3 4 x 4
• In general,
n 1
p( x ) ai x
i
i 0
or
p( x ) a0 a1 x a2 x an 1 x
2
n 1
Polynomial Evaluation
• Horner’s Rule:
– Given coefficients (a0,a1,a2,…,an-1), defining polynomial
n 1
p( x ) ai x i
i 0
– Given x, we can evaluate p(x) in O(n) time using the equation
p( x) a0 x(a1 x(a2 x(an2 xan1 )))
• Eval(A,x):
[Where A=(a0,a1,a2,…,an-1)]
– If n=1, then return a0
– Else,
• Let A’=(a1,a2,…,an-1)
[assume this can be done in constant time]
• return a0+x*Eval(A’,x)
Polynomial Multiplication
• Given coefficients (a0,a1,a2,…,an-1) and (b0,b1,b2,…,bn-1) defining two
polynomials, p() and q(), and number x, compute p(x)q(x).
• Horner’s rule doesn’t help, since
n 1
p( x )q( x ) ci x
where
i
i 0
i
ci a j bi j
j 0
• A straightforward evaluation would take O(n2) time. The “magical”
FFT will do it in O(n log n) time.
Polynomial Interpolation &
Polynomial Multiplication
• Given a set of n points in the plane with distinct x-coordinates, there
is exactly one (n-1)-degree polynomial going through all these points.
• Alternate approach to computing p(x)q(x):
– Calculate p() on 2n x-values, x0,x1,…,x2n-1.
– Calculate q() on the same 2n x values.
– Find the (2n-1)-degree polynomial that goes through the points
{(x0,p(x0)q(x0)), (x1,p(x1)q(x1)), …, (x2n-1,p(x2n-1)q(x2n-1))}.
• Unfortunately, a straightforward evaluation would still take O(n2)
time, as we would need to apply an O(n)-time Horner’s Rule
evaluation to 2n different points.
• The “magical” FFT will do it in O(n log n) time, by picking 2n points
that are easy to evaluate…
Primitive Roots of Unity
•
A number w is a primitive n-th root of unity, for n>1, if
–
–
•
•
wn = 1
The numbers 1, w, w2, …, wn-1 are all distinct
Example 1:
x
1
2
3
4
5
6
7
8
9
10
x^2
1
4
9
5
3
3
5
9
4
1
x^3
1
8
5
9
4
7
2
6
3
10
x^4
1
5
4
3
9
9
3
4
5
1
x^5
1
10
1
1
1
10
10
10
1
10
x^6
1
9
3
4
5
5
4
3
9
1
x^7
1
7
9
5
3
8
6
2
4
10
x^8
1
3
5
9
4
4
9
5
3
1
–
Z*11:
–
–
–
2, 6, 7, 8 are 10-th roots of unity in Z*11
22=4, 62=3, 72=5, 82=9 are 5-th roots of unity in Z*11
2-1=6, 3-1=4, 4-1=3, 5-1=9, 6-1=2, 7-1=8, 8-1=7, 9-1=5
x^9
1
6
4
3
9
2
8
7
5
10
x^10
1
1
1
1
1
1
1
1
1
1
Example 2: The complex number e2pi/n is a primitive n-th root of unity,
where i 1
Properties of Primitive Roots of Unity
•
Inverse Property: If w is a primitive root of unity, then w -1=wn-1
–
•
Proof: wwn-1=wn=1
Cancellation Property: For non-zero -n<k<n,
–
Proof:
n 1
w
j 0
•
w
kj
0
j 0
(w k )n 1 (w n )k 1 (1)k 1
11
0
k
k
k
k
w 1
w 1
w 1 w 1
Reduction Property: If w is a primitve (2n)-th root of unity, then w2 is a
primitive n-th root of unity.
–
•
kj
n 1
Proof: If 1,w,w2,…,w2n-1 are all distinct, so are 1,w2,(w2)2,…,(w2)n-1
Reflective Property: If n is even, then wn/2 = -1.
–
Proof: By the cancellation property, for k=n/2:
n 1
0 w ( n / 2) j w 0 w n / 2 w 0 w n / 2 w 0 w n / 2 (n / 2)(1 w n / 2 )
j 0
–
Corollary: wk+n/2= -wk.
The Discrete Fourier Transform
•
•
Given coefficients (a0,a1,a2,…,an-1) for an (n-1)-degree polynomial p(x)
The Discrete Fourier Transform is to evaluate p at the values
–
–
–
1,w,w2,…,wn-1
We produce (y0,y1,y2,…,yn-1), where yj=p(wj)
n 1
That is,
y j aiw ij
i 0
–
•
Matrix form: y=Fa, where F[i,j]=wij.
The Inverse Discrete Fourier Transform recovers the coefficients of an
(n-1)-degree polynomial given its values at 1,w,w2,…,wn-1
–
Matrix form: a=F -1y, where F -1[i,j]=w-ij/n.
Correctness of the inverse DFT
•
•
The DFT and inverse DFT really are inverse operations
Proof: Let A=F -1F. We want to show that A=I, where
1 n 1 ki kj
A[i, j ] w w
n k 0
•
If i=j, then
1 n 1 ki ki 1 n 1 0 1
A[i, i ] w w w n 1
n k 0
n k 0
n
•
If i and j are different, then
1 n 1 ( j i ) k
A[i, j ] w
0
n k 0
(by Cancellati on Property)
Convolution
•
•
The DFT and the inverse
DFT can be used to
multiply two polynomials
So we can get the
coefficients of the
product polynomial
quickly if we can compute
the DFT (and its inverse)
quickly…
[a0,a1,a2,...,an-1]
[b0,b1,b2,...,bn-1]
Pad with n 0's
Pad with n 0's
[a0,a1,a2,...,an-1,0,0,...,0]
[b0,b1,b2,...,bn-1,0,0,...,0]
DFT
DFT
[y0,y1,y2,...,y2n-1]
[z0,z1,z2,...,z2n-1]
Component
Multiply
[y0z0,y1z1,...,y2n-1z2n-1]
inverse DFT
[c0,c1,c2,...,c2n-1]
(Convolution)
The Fast Fourier Transform
•
•
The FFT is an efficient algorithm for computing the DFT
The FFT is based on the divide-and-conquer paradigm:
–
If n is even, we can divide a polynomial
into two polynomials
and we can write
The FFT Algorithm
The running time is O(n log n). [inverse FFT is similar]