Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
Power engineering wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stray voltage wikipedia , lookup
Current source wikipedia , lookup
Negative feedback wikipedia , lookup
Public address system wikipedia , lookup
Electrical ballast wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Voltage optimisation wikipedia , lookup
Audio power wikipedia , lookup
Mechanical filter wikipedia , lookup
Audio crossover wikipedia , lookup
Rectiverter wikipedia , lookup
Mains electricity wikipedia , lookup
Alternating current wikipedia , lookup
Anastasios Venetsanopoulos wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Buck converter wikipedia , lookup
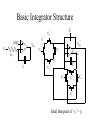
Linearized MOSFET Resistors Dr. Paul Hasler Review of Gm-C Filters Gm-C filters: voltage mode/current mode/log-domain Use amplifier dynamics as filtering elements: If making 10kHz filter, why make amplifiers run at 10MHz? Good properties • Highest bandwidth / power consumed • Smallest number of elements / area consumed • Lowest noise levels / power consumed (thermal) • Utilizes capacitor matching (ie. C4) • Electronically tunable Issues for Gm-C Filters Improvement by Floating-Gate Techniques Tuning Need control schemes (direct or indirect) – adds significant amount of control overhead Mostly compensates: slight adjustments due to transistor aging / T changes, etc. Matching Huge issue for current-mode techniques Design to eliminate these issues Distortion Techniques to improve linear range, but at a cost of lower gm/I (lower speed, higher noise, higher power) More techniques to improve linear range Most Gm-C techniques are fairly recent (80’s-90’s), and Floating-Gate techniques are even more recent (90’s - ). Other Filter Techniques Utilizing higher frequency elements / additional elements, to improve distortion (as well as 1/f noise, etc.). Two techniques: Amplifiers: (Op-amps), that run at much faster frequencies than filter cutoff. Can use feedback to widen the linear range. Significant power increase. Oversampling: Using a wider bandwidth than necessary to lower noise per unit bandwith (and more power) and distortion. Nonlinear systems can utilize noise shaping (Sigma-Delta Modulators) Common in sampled data systems. Two techniques: Switched Capacitor Blocks Blocks based upon traditional, discrete RC active fitlers. How to Build Resistances? Resistors in a CMOS process - Sometimes High resistance poly layer in a given process - Poly, diffusions, or Well, but larger area consumed Fairly linear, can be large for frequencies under 1MHz. Not tunable: therefore RC > 20% mismatch, so we have a problem for precission filters…so either laser trimming, EEPROM trimming, (could tune cap, but…) or imprecise filters, like anti-alaiasing filter. MOSFET as a Resistor MOSFET as a Resistor Ohmic Region: how linear will that be, well only over a small region. We have a gate voltage, so it is tunable, but of course, we still need a method of tuning. MOSFET has an ohmic region both in subthreshold and above threshold operation. Resistance is not exactly a constant, except for a fixed source voltage…. resistance changes with source / drain voltage. Could imagine an nFET and a pFET in parallel, but still not a precission element. MOSFET as a Resistor Two things to improve the situation. 1. Typically built around an amplifier to fix one of the terminals (mostly op-amps, but could also be a Norton or transisresistance approach as well) The amplifier must keep terminals nearly fixed to eliminate distrotion; therefore, in general the amplifier must run a lot faster than expected by a simple GmC stage. 2. Can use a combination of MOSFETs to linearize the behavior. Linearized MOSFET resistors Simple Structure + Vc Vi Va Balanced Differential Element + + Vi + Iout + Vc Va + Iout - - Vc Vc - Iout Vi - Vc - - Va Iout - Va + + Vc Vi - Linearized MOSFET resistors In practice, one might use even lower input impedance elements + Vi Vc + + Iout - - Vc Vc - Iout + Vi - Iout Vc Va + + Iout - Va GND GND GND GND Basic Resistive Feedback + GND Vi Vout Vin + Vc + Vout - - Vc Vc R1 R2 Vi - Vout - + Vb + Vc - - Vb Vb + Vb Basic Integrator Structure C + Vi GND Vout Vin + Vc + Vout - - Vc Vc R1 Vi C - Vout - C + Vc - Vb - + Vb Vb + Vb Ideal Integrator if + Vb - = Vb Tow-Thomas SOS (Lowpass) C1 R3 C2 R1 R R4 R2 Vin R GND V1 GND R4 needed for stability Tuning can be interesting (tuning pots) All amps must be sufficiently fast V2 Vout GND Tow-Thomas SOS (Lowpass) C R C R R4 Vin R R R GND Vout GND GND t = RC Q = R4 / R