Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Processes, Threads,
Synchronization
CS 519: Operating System Theory
Computer Science, Rutgers University
Fall 2013
Process
Process = system abstraction for the set of resources
required for executing a program
= a running instance of a program
= memory image + registers (+ I/O state)
The stack + registers form the execution context
Computer Science, Rutgers
2
CS 519: Operating System Theory
Process Image
Code
Globals
Stack
Each variable must be assigned a storage
class
Global (static) variables
Allocated in the global region at compiletime
Local variables and parameters
Allocated dynamically on the stack
Heap
Memory
Computer Science, Rutgers
Dynamically created objects
Allocated from the heap
3
CS 519: Operating System Theory
What About The OS Image?
Recall that one of the function of an OS is to provide a virtual
machine interface that makes programming the machine easier
So, a process memory image must also contain the OS
Code
Globals
Memory
OS
Stack
Code
Globals
Heap
Stack
OS data space is used to store things
like file descriptors for files being
accessed by the process, status of I/O
devices, etc.
Heap
Computer Science, Rutgers
4
CS 519: Operating System Theory
What Happens When There Are More
Than One Running Process?
OS
Code
Globals
Stack
P0
Heap
P1
P2
Computer Science, Rutgers
5
CS 519: Operating System Theory
Process Control Block
Each process has per-process state maintained by the OS
Identification: process, parent process, user, group, etc.
Execution contexts: threads
Address space: virtual memory
I/O state: file handles (file system), communication endpoints
(network), etc.
Accounting information
For each process, this state is maintained in a process control
block (PCB)
This is just data in the OS data space
Computer Science, Rutgers
6
CS 519: Operating System Theory
Process Creation
How to create a process? System call.
In UNIX, a process can create another process using the fork()
system call
int pid = fork();
/* this is in C */
The creating process is called the parent and the new process is
called the child
The child process is created as a copy of the parent process
(process image and process control structure) except for the
identification and scheduling state
Parent and child processes run in two different address spaces
By default, there is no memory sharing
Process creation is expensive because of this copying
The exec() call is provided for the newly created process to run a
different program than that of the parent
Computer Science, Rutgers
7
CS 519: Operating System Theory
System Call In Monolithic OS
interrupt vector for trap instruction
PC
PSW
in-kernel file system(monolithic OS)
code for fork system call
kernel mode
trap
iret
user mode
id = fork()
Computer Science, Rutgers
8
CS 519: Operating System Theory
Process Creation
fork() code
PCBs
fork()
exec()
fork()
Computer Science, Rutgers
9
CS 519: Operating System Theory
Example of Process Creation Using Fork
The UNIX shell is command-line interpreter whose basic purpose
is for user to run applications on a UNIX system
cmd arg1 arg2 ... argn
Computer Science, Rutgers
10
CS 519: Operating System Theory
Process Termination
One process can wait for another process to finish
using the wait() system call
Can wait for a child to finish as shown in the example
Can also wait for an arbitrary process if it knows its PID
Can kill another process using the kill() system call
What all happens when kill() is invoked?
What if the victim process does not want to die?
Computer Science, Rutgers
11
CS 519: Operating System Theory
Process Swapping
May want to swap out entire process
Thrashing if too many processes competing for resources
To swap out a process
Suspend its execution
Copy all of its information to backing store (except for PCB)
To swap a process back in
Copy needed information back into memory, e.g. page table,
thread control blocks
Restore state to blocked or ready
Must check whether event(s) has (have) already occurred
Computer Science, Rutgers
12
CS 519: Operating System Theory
Process State Diagram
ready
(in
memory)
swap in
swap out
suspended
(swapped out)
Computer Science, Rutgers
13
CS 519: Operating System Theory
Signals
OS may need to “upcall” into user processes
Signals
UNIX mechanism to upcall when an event of interest occurs
Potentially interesting events are predefined: e.g.,
segmentation violation, message arrival, kill, etc.
When interested in “handling” a particular event (signal), a
process indicates its interest to the OS and gives the OS a
procedure that should be invoked in the upcall.
Computer Science, Rutgers
14
CS 519: Operating System Theory
Signals (Cont’d)
When an event of interest occurs, the
kernel handles the event first, then
modifies the process‘ stack to look as
if the process’ code made a procedure
call to the signal handler.
When the user process is scheduled
next, it executes the handler first
From the handler, the user process
returns to where it was when the event
occurred
Computer Science, Rutgers
15
Handler
B
B
A
A
CS 519: Operating System Theory
Inter-Process Communication
Most operating systems provide several abstractions
for inter-process communication: message passing,
shared memory, etc
Communication requires synchronization between
processes (i.e. data must be produced before it is
consumed)
Synchronization can be implicit (message passing) or
explicit (shared memory)
Explicit synchronization can be provided by the OS
(semaphores, monitors, etc) or can be achieved
exclusively in user-mode (if processes share memory)
Computer Science, Rutgers
16
CS 519: Operating System Theory
Message Passing Implementation
kernel buffers
kernel
1st
copy
2nd
copy
process 1
x=1
send(process2, &X)
X
process 2
receive(process1,&Y)
print Y
Y
two copy operations in a conventional implementation
17
Shared Memory Implementation
kernel
shared
region
process 1
X=1
X
process 2
physical memory
print Y
Y
no copying but synchronization is necessary
18
Inter-Process Communication
More on shared memory and message passing later
Synchronization after we talk about threads
Computer Science, Rutgers
19
CS 519: Operating System Theory
A Tree of Processes On A Typical UNIX
System
Computer Science, Rutgers
20
CS 519: Operating System Theory
Process: Summary
System abstraction – the set of resources required for executing
a program (an instantiation of a program)
Execution context
Address space
File handles, communication endpoints, etc.
Historically, all of the above “lumped” into a single abstraction
More recently, split into several abstractions
Threads, address space, protection domain, etc.
OS process management:
Supports creation of processes and interprocess communication (IPC)
Allocates resources to processes according to specific policies
Interleaves the execution of multiple processes to increase system
utilization
Computer Science, Rutgers
21
CS 519: Operating System Theory
Threads
Thread of execution: stack + registers (including PC)
Informally: where an execution stream is currently at in the
program and the method invocation chain that brought the
execution stream to the current place
Example: A called B, which called C, which called B, which called
C
The PC should be pointing somewhere inside C at this point
The stack should contain 5 activation records: A/B/C/B/C
Process model discussed thus far implies a single thread
Computer Science, Rutgers
22
CS 519: Operating System Theory
Multi-Threading
Why limit ourselves to a single thread?
Think of a web server that must service a large stream of requests
If only have one thread, can only process one request at a time
What to do when reading a file from disk?
Multi-threading model
Each process can have multiple threads
Each thread has a private stack
Registers are also private
All threads of a process share the code, the global data and heap
Computer Science, Rutgers
23
CS 519: Operating System Theory
Process Address Space Revisited
OS
OS
Code
Code
Globals
Globals
Stack
Stack
Stack
Heap
Heap
(a) Single-threaded address space (b) Multi-threaded address space
Computer Science, Rutgers
24
CS 519: Operating System Theory
Multi-Threading (cont)
Implementation
Each thread is described by a thread-control block (TCB)
A TCB typically contains
Thread ID
Space for saving registers
Pointer to thread-specific data not on stack
Observation
Although the model is that each thread has a private stack,
threads actually share the process address space
There’s no memory protection!
Threads could potentially write into each other’s stack
Computer Science, Rutgers
25
CS 519: Operating System Theory
Posix Thread (Pthread) API
_
thread creation and termination
pthread_create(&tid,NULL,start_fn,arg);
pthread_exit(status)’
_
_
_
thread join
pthread_join(tid, &status);
mutual exclusion
pthread_mutex_lock(&lock);
pthread_mutex_unlock(&lock);
condition variable
pthread_cond_wait(&c,&lock);
pthread_cond_signal(&c);
26
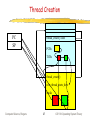
Thread Creation
PC
SP
thread_create() code
PCBs
TCBs
thread_create()
new_thread_starts_here
stacks
Computer Science, Rutgers
27
CS 519: Operating System Theory
Context Switching
Suppose a process has multiple threads, a uniprocessor
machine only has 1 CPU, so what to do?
In fact, even if we only had one thread per process, we would
have to do something about running multiple processes …
We multiplex the multiple threads on the single CPU
At any instance in time, only one thread is running
At some point in time, the OS may decide to stop the
currently running thread and allow another thread to
run
This switching from one running thread to another is
called context switching
Computer Science, Rutgers
28
CS 519: Operating System Theory
Diagram of Thread State
Computer Science, Rutgers
29
CS 519: Operating System Theory
Context Switching (cont)
How to do a context switch?
Save state of currently executing thread
Copy all “live” registers to the thread control block
Restore state of thread to run next
Copy values of live registers from thread control block to
registers
When does context switching take place?
Computer Science, Rutgers
30
CS 519: Operating System Theory
Context Switching (cont)
When does context switching occur?
When the OS decides that a thread has run long enough and
that another thread should be given the CPU
Remember how the OS gets control of the CPU back when it is
executing user code?
When a thread performs an I/O operation and needs to block
to wait for the completion of this operation
To wait for some other thread
Thread synchronization
Computer Science, Rutgers
31
CS 519: Operating System Theory
How Is the Switching Code Invoked?
user thread executing clock interrupt PC modified by
hardware to “vector” to interrupt handler user thread state is
saved for later resume clock interrupt handler is invoked
disable interrupt checking check whether current thread has
run “long enough” if yes, post asynchronous software trap
(AST) enable interrupt checking exit interrupt handler
enter “return-to-user” code check whether AST was posted
if not, restore user thread state and return to executing user
thread; if AST was posted, call context switch code
Why need AST?
Computer Science, Rutgers
32
CS 519: Operating System Theory
How Is the Switching Code Invoked?
(cont)
user thread executing system call to perform I/O
user thread state is saved for later resume OS code
to perform system call is invoked I/O operation
started (by invoking I/O driver) set thread status to
waiting move thread’s TCB from run queue to wait
queue associated with specific device call context
switching code
Computer Science, Rutgers
33
CS 519: Operating System Theory
Context Switching
At entry to CS, the return address is either in a register or on
the stack (in the current activation record)
CS saves this return address to the TCB instead of the current
PC
To thread, it looks like CS just took a while to return!
If the context switch was initiated from an interrupt, the thread
never knows that it has been context switched out and back in
unless it looking at the “wall” clock
Computer Science, Rutgers
34
CS 519: Operating System Theory
Context Switching (cont)
Even that is not quite the whole story
When a thread is switched out, what happens to it?
How do we find it to switch it back in?
This is what the TCB is for. System typically has
A run queue that points to the TCBs of threads ready to run
A blocked queue per device to hold the TCBs of threads blocked
waiting for an I/O operation on that device to complete
When a thread is switched out at a timer interrupt, it is still ready to
run so its TCB stays on the run queue
When a thread is switched out because it is blocking on an I/O
operation, its TCB is moved to the blocked queue of the device
Computer Science, Rutgers
35
CS 519: Operating System Theory
Ready Queue And Various I/O Device
Queues
Computer Science, Rutgers
36
CS 519: Operating System Theory
Switching Between Threads of Different
Processes
What if switching to a thread of a different process?
Caches, TLB, page table, etc.?
Caches
Physical addresses: no problem
Virtual addresses: cache must either have process tag or must flush
cache on context switch
TLB
Each entry must have process tag or must flush TLB on context
switch
Page table
Typically have page table pointer (register) that must be reloaded on
context switch
Computer Science, Rutgers
37
CS 519: Operating System Theory
Threads & Signals
What happens if kernel wants to signal a process when
all of its threads are blocked?
When there are multiple threads, which thread should
the kernel deliver the signal to?
OS writes into process control block that a signal should be
delivered
Next time any thread from this process is allowed to run, the
signal is delivered to that thread as part of the context switch
What happens if kernel needs to deliver multiple signals?
Computer Science, Rutgers
38
CS 519: Operating System Theory
Thread Implementation
Kernel-level threads (lightweight processes)
Kernel sees multiple execution contexts
Thread management done by the kernel
User-level threads
Implemented as a thread library, which contains the code for
thread creation, termination, scheduling and switching
Kernel sees one execution context and is unaware of thread
activity
Can be preemptive or not
Computer Science, Rutgers
39
CS 519: Operating System Theory
User-Level Thread Implementation
kernel
process
thread 1
pc
sp
code
pc
thread 2
data
sp
thread stacks
40
User-Level vs. Kernel-Level Threads
Advantages of user-level threads
Performance: low-cost thread operations (do not require
crossing protection domains)
Flexibility: scheduling can be application specific
Portability: user-level thread library easy to port
Disadvantages of user-level threads
If a user-level thread is blocked in the kernel, the entire
process (all threads of that process) are blocked
Cannot take advantage of multiprocessing (the kernel assigns
one process to only one processor)
Computer Science, Rutgers
41
CS 519: Operating System Theory
User-Level vs. Kernel-Level Threads
user-level
threads
kernel-level
threads
threads
thread
scheduling
user
kernel
threads
process
thread
scheduling
process
scheduling
processor
processor
Computer Science, Rutgers
process
scheduling
42
CS 519: Operating System Theory
User-Level vs. Kernel-Level Threads
No reason why we should not
have both
user-level
threads
Most systems now support
kernel threads
thread
scheduling
User-level threads are available
as linkable libraries
user
kernel
kernel-level
threads
thread
scheduling
process
scheduling
processor
Computer Science, Rutgers
43
CS 519: Operating System Theory
Kernel Support for User-Level Threads
Even kernel threads are not quite the right abstraction
for supporting user-level threads
Mismatch between where the scheduling information is
available (user) and where scheduling on real processors
is performed (kernel)
When the kernel thread is blocked, the corresponding physical
processor is lost to all user-level threads although there may
be some ready to run.
Computer Science, Rutgers
44
CS 519: Operating System Theory
Why Kernel Threads Are Not The Right
Abstraction
user-level threads
user-level scheduling
user
kernel
kernel thread
blocked
kernel-level scheduling
physical processor
Computer Science, Rutgers
45
CS 519: Operating System Theory
Scheduler Activations:
Kernel Support for User-Level Threads
Each process contains a user-level thread system (ULTS) that
controls the scheduling of the allocated processors
Kernel allocates processors to processes as scheduler activations
(SAs). An SA is similar to a kernel thread, but it also transfers
control from the kernel to the ULTS on a kernel event as
described below
Kernel notifies a process whenever the number of allocated
processors changes or when an SA is blocked due to the userlevel thread running on it (e.g., for I/O or on a page fault)
The process notifies the kernel when it needs more or fewer SAs
(processors)
Ex.: (1) Kernel notifies ULTS that user-level thread blocked by
creating an SA and upcalling the process; (2) ULTS removes the
state from the old SA, tells the kernel that it can be reused,
and decides which user-level thread to run on the new SA
Computer Science, Rutgers
46
CS 519: Operating System Theory
User-Level Threads On Top of
Scheduler Activations
user-level threads
user-level scheduling
blocked
active
user
kernel
scheduler activation
kernel-level scheduling
blocked active
physical processor
Source: T. Anderson et al. “Scheduler Activations: Effective Kernel Support for the
User-Level Management of Parallelism”. ACM TOCS, 1992.
Computer Science, Rutgers
47
CS 519: Operating System Theory
Threads vs. Processes
Why multiple threads?
Can’t we use multiple processes to do whatever it is that we do with
multiple threads?
Of course, we need to be able to share memory (and other resources)
between multiple processes …
But this sharing is already supported by threads
Operations on threads (creation, termination, scheduling, etc..) are
cheaper than the corresponding operations on processes
This is because thread operations do not involve manipulations of other
resources associated with processes (I/O descriptors, address space, etc)
Inter-thread communication is supported through shared memory
without kernel intervention
Why not? Have multiple other resources, why not threads?
Computer Science, Rutgers
48
CS 519: Operating System Theory
Thread/Process Operation Latencies
Operation
User-level
Thread
(s)
Kernel
Threads
(s)
Processes
(s)
Null fork
34
948
11,300
Signal-wait
37
441
1,840
VAX uniprocessor running UNIX-like OS, 1992.
Operation
Kernel Threads
(s)
Null fork
45
Processes
(s)
108
2.8-GHz Pentium 4 uniprocessor running Linux, 2004.
Computer Science, Rutgers
49
CS 519: Operating System Theory
Synchronization
Synchronization
Problem
Threads must share data
Data consistency must be maintained
Computer Science, Rutgers
51
CS 519: Operating System Theory
The Critical Section Problem
When a process executes code that
manipulates shared data (or resource), we
say that the process is in its critical section
(for that shared data)
The execution of critical sections must be
mutually exclusive: at any time: only one
process is allowed to execute in its critical
section (even with multiple CPUs)
Each process must request the permission to
enter a critical section
52
Terminologies
Critical section: a section of code which reads or writes
shared data
Race condition: potential for interleaved execution of a
critical section by multiple threads
Results are non-deterministic
Mutual exclusion: synchronization mechanism to avoid
race conditions by ensuring exclusive execution of
critical sections
Deadlock: permanent blocking of threads
Starvation: execution but no progress
Computer Science, Rutgers
53
CS 519: Operating System Theory
The Critical Section Problem
• The section of code implementing the request to enter
a CS is called the entry section
• The critical section might be followed by an exit
section
• The remaining code is the remainder section
• The critical section problem: to design a protocol
that, if executed by concurrent processes, ensures
that their action will not depend on the order in which
their execution is interleaved (possibly on many
processors)
54
Framework for Critical Section
Solution Analysis
•Each thread executes at nonzero speed, but no
assumption on the relative speed of n threads
•Structure of a concurrent thread:
repeat
entry section
critical section
exit section
remainder section
forever
•No assumption about order of interleaved execution
•Basically, a ME solution must specify the entry and
exit sections
55
Requirements for Mutual Exclusion
• No assumptions on hardware: speed, # of processors
• Mutual exclusion is maintained – that is, only one
thread at a time can be executing inside a CS
• Execution of CS takes a finite time
• A thread/process not in CS cannot prevent other
threads/processes to enter the CS
• Entering CS cannot de delayed indefinitely: no
deadlock or starvation
Computer Science, Rutgers
56
CS 519: Operating System Theory
What about thread failures?
If all three criteria (ME, progress, bounded waiting) are
satisfied, then a valid solution will provide robustness
against failure of a thread in its remainder section (RS)
Because failure in RS is just like having an infinitely
long RS
However, no valid solution can provide robustness against
a thread failing in its critical section (CS)
A thread Ti that fails in its CS does not signal that
fact to other threads: for them Ti is still in its CS
57
Synchronization Primitives
Most common primitives
Locks (mutual exclusion)
Condition variables
Semaphores
Monitors
Need
Semaphores, or
Locks and condition variables, or
Monitors
Computer Science, Rutgers
58
CS 519: Operating System Theory
Solutions for Mutual Exclusion
•software reservation: a thread must register its
intent to enter CS and then, wait until no other thread
has registered a similar intention before proceeding
•spin-locks using memory-interlocked instructions:
require special hardware to ensure that a given location
can be read, modified and written without interruption
(i.e. TST: test&set instruction)
•OS-based mechanisms for ME: semaphores, monitors,
message passing, lock files
59
Locks
Mutual exclusion want to be
the only thread modifying a set
of data items
Can look at it as exclusive
access to data items or to a
piece of code
Have three components:
Acquire, Release, Waiting
Computer Science, Rutgers
60
CS 519: Operating System Theory
Example
public class BankAccount
{
Lock aLock = new Lock;
int balance = 0;
...
public void deposit(int amount)
{
aLock.acquire();
balance = balance + amount;
aLock.release();
}
Computer Science, Rutgers
61
public void withdrawal(int amount)
{
aLock.acquire();
balance = balance - amount;
aLock.release();
}
}
CS 519: Operating System Theory
Implementing Locks Inside OS Kernel
From Nachos (with some simplifications)
public class Lock {
private KThread lockHolder = null;
private ThreadQueue waitQueue =
ThreadedKernel.scheduler.newThreadQueue(true);
public void acquire() {
KThread thread = KThread.currentThread();
if (lockHolder != null) {
waitQueue.waitForAccess(thread);
KThread.sleep();
}
else {
lockHolder = thread;
}
}
Computer Science, Rutgers
62
// Get thread object (TCB)
// Gotta wait
// Put thread on wait queue
// Context switch
// Got the lock
CS 519: Operating System Theory
Implementing Locks Inside OS Kernel
(cont)
public void release() {
if ((lockHolder = waitQueue.nextThread()) != null)
lockHolder.ready();
// Wake up a waiting thread
}
This implementation is not quite right … what’s missing?
Computer Science, Rutgers
63
CS 519: Operating System Theory
Implementing Locks Inside OS Kernel
(cont)
public void release() {
boolean intStatus = Machine.interrupt().disable();
if ((lockHolder = waitQueue.nextThread()) != null)
lockHolder.ready();
Machine.interrupt().restore(intStatus);
}
Unfortunately, disabling interrupts only works for uniprocessors.
Computer Science, Rutgers
64
CS 519: Operating System Theory
Implementing Locks At User-Level
Why?
Expensive to enter the kernel
Parallel programs on multiprocessor systems
What’s the problem?
Can’t disable interrupt …
Many software algorithms for mutual exclusion
See any OS book
Disadvantages: very difficult to get correct
So what do we do?
Computer Science, Rutgers
65
CS 519: Operating System Theory
Implementing Locks At User-Level
Simple with a “little bit” of help from the hardware
Atomic read-modify-write instructions
Test-and-set
Atomically read a variable and, if the value of the variable is currently
0, set it to 1
Fetch-and-increment
Compare-and-swap
Computer Science, Rutgers
66
CS 519: Operating System Theory
Hardware Solutions: Interrupt Disabling
•On a uniprocessor, mutual
exclusion is preserved but
efficiency of execution is
degraded
Process Pi:
repeat
• while in CS, execution
disable interrupts
cannot be interleaved with
critical section
other processes in RS
enable interrupts
•On a multiprocessor, mutual
remainder section
exclusion is not preserved
forever
• CS is atomic but not
mutually exclusive
•Generally not an acceptable
solution
67
Hardware Solutions: Special Machine
Instructions
• Normally, an access to a memory location excludes
other access to that same location
• Extension: designers have proposed machines
instructions that perform two actions atomically
(indivisible) on the same memory location (ex:
reading and writing)
• The execution of such an instruction is also mutually
exclusive (even with multiple CPUs)
• They can be used to provide mutual exclusion but
need to be complemented by other mechanisms to
satisfy the other two requirements of the CS
problem (and avoid starvation and deadlock)
68
Test-and-Set Instruction
•A C++ description of
test-and-set:
•An algorithm that uses
test&set for mutual exclusion:
69
bool testset(int& i)
{
if (i==0) {
i=1;
return true;
} else {
return false;
}
}
Process Pi:
repeat
repeat{}
until testset(b);
CS
b:=0;
RS
forever
Test-and-Set Instruction (cont.)
Shared variable b is initialized to 0
Only the first Pi that sets b enters CS
Mutual exclusion is preserved
•if Pi enter CS, the other Pj are busy waiting
When Pi exit CS, the selection of the next Pj that
enters CS is arbitrary
No bounded waiting
Starvation is possible
70
Using xchg for Mutual Exclusion
•Shared variable b is
initialized to 0
Process Pi:
repeat
k:=1
repeat xchg(k,b)
until k=0;
CS
b:=0;
RS
forever
•Each Pi has a local variable
k
•The only Pi that can enter
CS is the one that finds
b=0
•This Pi excludes all the
other Pj by setting b to 1
71
Atomic Read-Modify-Write Instructions
Test-and-set
Read a memory location and, if the value is currently 0, set it
to 1
Fetch-and-increment
Return the value of of a memory location
Increment the value by 1 (in memory, not the value returned)
Compare-and-swap
Compare the value of a memory location with an old value
If the same, replace with a new value
Computer Science, Rutgers
72
CS 519: Operating System Theory
Mutual Exclusion Machine Instructions
Advantages
Applicable to any number of
processes/threads on either a single
processor or multiple processors sharing main
memory
It is simple and easy to verify
It can be used to support multiple critical
sections
73
Mutual Exclusion Machine Instructions
Disadvantages
Busy-waiting consumes processor time
Starvation is possible when a process leaves a
critical section and more than one process is
waiting.
Deadlock
If a low priority process has the critical region and
a higher priority process needs it, the higher
priority process will obtain the processor just to
wait for the critical region
74
Implementing Spin Locks Using Test&Set
#define UNLOCKED 0
#define LOCKED 1
Spin_acquire(lock)
{
while (test-and-set(lock) == LOCKED);
}
Spin_release(lock)
{
lock = UNLOCKED;
}
Problems?
Computer Science, Rutgers
75
CS 519: Operating System Theory
Implementing Spin Locks Using Test&Set
#define UNLOCKED 0
#define LOCKED 1
Spin_acquire(lock)
{
while (test-and-set(lock) == LOCKED);
}
Spin_release(lock)
{
lock = UNLOCKED;
}
Problems? Lots of memory traffic if TAS always sets; lots of
traffic when lock is released; no ordering guarantees. Solutions?
Computer Science, Rutgers
76
CS 519: Operating System Theory
Spin Locks Using Test and Test&Set
Spin_acquire(lock)
{
while (1) {
while (lock == LOCKED);
if (test-and-set(lock) == UNLOCKED)
break;
}
}
Spin_release(lock)
{
lock = UNLOCKED;
}
Better, since TAS is guaranteed not to generate traffic
unnecessarily. But there is still lots of traffic after a release.
Still no ordering guarantees.
Computer Science, Rutgers
77
CS 519: Operating System Theory
OS Solutions: Semaphores
Synchronization tool (provided by the OS) that does not
require busy waiting
A semaphore S is an integer variable that, apart from
initialization, can only be accessed through two atomic
and mutually exclusive operations:
wait(S)
signal(S)
Avoids busy waiting
when a thread has to wait, the OS will put it in a
blocked queue of threads waiting for that semaphore
78
Semaphores
•Internally, a semaphore is a record (structure):
type semaphore = record
count: integer;
queue: list of threads
end;
var S: semaphore;
•When a thread must wait for a semaphore S, it is
blocked and put on the semaphore’s queue
•The signal operation removes (according to a fair
policy like ,FIFO) one thread from the queue and puts
it in the list of ready threads
79
Semaphore Operations
wait(S):
S.count--;
if (S.count<0) {
block this thread
place this thread in S.queue
}
signal(S):
S.count++;
if (S.count<=0) {
remove a thread P from S.queue
place this thread P on ready list
}
•S.count must be initialized to a
nonnegative value (depending on application)
80
Semaphores: Observations
S.count >=0
the number of threads that can execute wait(S)
without being blocked is S.count
S.count<0
the number of threads waiting on S is = |S.count|
Atomicity and mutual exclusion
no two threads can be in wait(S) and signal(S) (on the
same S) at the same time (even with multiple CPUs)
The code defining wait(S) and signal(S) must be
executed in critical sections
81
Semaphores: Implementation
•Key observation: the critical sections defined by
wait(S) and signal(S) are very short (typically 10
instructions)
•Uniprocessor solutions:
disable interrupts during these operations (ie: for a very short
period)
does not work on a multiprocessor machine.
•Multiprocessor solutions:
use software or hardware mutual exclusion solutions in the OS.
the amount of busy waiting is small.
82
Using Semaphores for Solving Critical
Section Problems
For n threads
Initialize S.count to 1
Only one thread is allowed into
CS (mutual exclusion)
To allow k threads into CS, we
initialize S.count to k
83
Process Pi:
repeat
wait(S);
CS
signal(S);
RS
forever
Using Semaphores to SynchronizeThreads
We have two threads: P1 and P2
Problem: Statement S1 in P1 must be performed
before statement S2 in P2
Solution: define a semaphore “synch”
Initialize synch to 0
P1 code:
S1;
signal(synch);
P2 code
wait(synch);
S2;
84
Binary Semaphores
•Similar to general (counting) semaphores except that “count”
is Boolean valued
•Counting semaphores can be implemented using binary
semaphores
•More difficult to use than counting semaphores (eg: they
cannot be initialized to an integer k > 1)
85
Binary Semaphore Operations
waitB(S):
if (S.value = 1) {
S.value := 0;
} else {
block this process
place this process in S.queue
}
signalB(S):
if (S.queue is empty) {
S.value := 1;
} else {
remove a process P from S.queue
place this process P on ready list
}
86
Problems with Semaphores
• Semaphores are a powerful tool for enforcing
mutual exclusion and coordinate threads
• Problem: wait(S) and signal(S) are scattered
among several threads
•It is difficult to understand their effects
•Usage must be correct in all threads
•One badly coded (or malicious) thread can fail
the entire collection of threads
87
Monitors
• Are high-level language constructs that provide
equivalent functionality to semaphores but are
easier to control
• Found in many concurrent programming languages
• Concurrent Pascal, Modula-3, uC++, Java...
• Can be implemented using semaphores
88
Monitors
Is a software module containing:
•one or more procedures
•an initialization sequence
•local data variables
Characteristics:
•local variables accessible only by monitor’s procedures
•a process enters the monitor by invoking one of it’s
procedures
•only one process can be in the monitor at any one time
89
Monitors
• The monitor ensures mutual exclusion
• no need to program this constraint explicitly
• Shared data are protected by placing them in the
monitor
•The monitor locks the shared data on process entry
• Process/thread synchronization is done using
condition variables, which represent conditions a
process may need to wait for before executing in the
monitor
90
Condition Variables
A condition variable is always associated with a
condition and a lock
Typically used to wait for a condition to take on a given
value
Three operations:
cond_wait(lock, cond_var)
cond_signal(cond_var)
cond_broadcast(cond_var)
Computer Science, Rutgers
91
CS 519: Operating System Theory
Condition Variables
Local to the monitor (accessible only within the monitor)
Can be access and changed only by two functions:
•cwait(a): blocks execution of the calling thread on
condition (variable) a
• the process can resume execution only if another process
executes csignal(a)
•csignal(a): resume execution of some process blocked
on condition (variable) a.
• If several such process exists: choose any one
• If no such process exists: do nothing
92
Condition Variables
cond_wait(lock, cond_var)
Release the lock
Sleep on cond_var
When awakened by the system, reacquire the lock and return
cond_signal(cond_var)
If at least 1 thread is sleeping on cond_var, wake 1 up
Otherwise, no effect
cond_broadcast(cond_var)
If at least 1 thread is sleeping on cond_var, wake everyone up
Otherwise, no effect
Computer Science, Rutgers
93
CS 519: Operating System Theory
Posix Thread (Pthread) API
_
thread creation and termination
pthread_create(&tid,NULL,start_fn,arg);
pthread_exit(status)’
_
_
_
thread join
pthread_join(tid, &status);
mutual exclusion
pthread_mutex_lock(&lock);
pthread_mutex_unlock(&lock);
condition variable
pthread_cond_wait(&c,&lock);
pthread_cond_signal(&c);
94
Condition Variables (example)
_
_
thread 1
pthread_mutex_lock(&lock);
while (!my-condition)
pthread_cond_wait(&c,&lock);
do_critical_section();
pthread_mutex_unlock(&lock);
thread 2
pthread_mutex_lock(&lock);
my-condition = true;
pthread_mutex_unlock(&lock);
pthread_cond_signal(&c);
95
Producer/Consumer Example
Producer
Consumer
lock(lock_bp)
while (free_bp.is_empty())
cond_wait(lock_bp, cond_freebp_empty)
buffer free_bp.get_buffer()
unlock(lock_bp)
lock(lock_bp)
while (data_bp.is_empty())
cond_wait(lock_bp, cond_databp_empty)
buffer data_bp.get_buffer()
unlock(lock_bp)
… produce data in buffer …
… consume data in buffer …
lock(lock_bp)
data_bp.add_buffer(buffer)
cond_signal(cond_databp_empty)
unlock(lock_bp)
lock(lock_bp)
free_bp.add_buffer(buffer)
cond_signal(cond_freebp_empty)
unlock(lock_bp)
Computer Science, Rutgers
96
CS 519: Operating System Theory
Monitors
•Awaiting processes are either
in the entrance queue or in a
condition queue
•A process puts itself into
condition queue cn by issuing
cwait(cn)
•csignal(cn) brings into the
monitor one process in condition
cn queue
•csignal(cn) blocks the calling
process and puts it in the
urgent queue (unless csignal is
the last operation of the
monitor procedure)
97
Deadlock
Computer Science, Rutgers
Lock A
Lock B
A
B
98
CS 519: Operating System Theory
Deadlock
Computer Science, Rutgers
Lock A
Lock B
A
B
99
CS 519: Operating System Theory
Deadlock
Computer Science, Rutgers
Lock A
Lock B
Lock B
Lock A
100
CS 519: Operating System Theory
Deadlock (Cont’d)
Deadlock can occur whenever multiple parties are competing for
exclusive access to multiple resources
How can we deal deadlocks?
Deadlock prevention
Design a system without one of mutual exclusion, hold and wait, no
preemption or circular wait (four necessary conditions)
To prevent circular wait, impose a strict ordering on resources. For instance, if
need to lock variables A and B, always lock A first, then lock B
Deadlock avoidance
Deny requests that may lead to unsafe states (Banker’s algorithm)
Running the algorithm on all resource requests is expensive
Deadlock detection and recovery
Check for circular wait periodically. If circular wait is found, abort all
deadlocked processes (extreme solution but very common)
Checking for circular wait is expensive
Computer Science, Rutgers
101
CS 519: Operating System Theory