Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Jordan normal form wikipedia , lookup
Matrix (mathematics) wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Cross product wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Exterior algebra wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Singular-value decomposition wikipedia , lookup
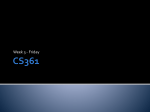
Gaussian elimination wikipedia , lookup
Determinant wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Matrix multiplication wikipedia , lookup
System of linear equations wikipedia , lookup
Vector space wikipedia , lookup
Euclidean vector wikipedia , lookup
Covariance and contravariance of vectors wikipedia , lookup
GX01 – Robotic Systems Engineering Dan Stoyanov George Dwyer, Krittin Pachtrachai 2016 Vectors and Vector Spaces • • • • Introduction Vectors and Vector Spaces Affine Spaces Euclidean Spaces 2 Vectors • The most fundamental element in linear algebra is a vector • Vectors are special types of tuples which satisfy various types of scaling and addition operations • We shall meet several kinds in this course: – Coordinate vector spaces – Functional vector spaces (perhaps) • Vectors actually “live” in a vector space, but we can’t talk about this until we’ve looked a bit more at the properties of vectors 3 Vectors as Geometric Entities • Vectors are geometric entities which encode relative displacement (usually from an origin) • They do not encode an absolute position • They are not special cases of a matrix • They have their own algebra and rules of combination 4 4 Equivalency of Vectors Equivalent vectors are parallel and of the same length • Two vectors are the same iff (if and only if): – They have the same direction – They have the same length 5 5 Basic Operations on Vectors • Vectors support addition and scaling: – Multiplication by a scalar, – Addition of one vector to another, 6 Scaling Vectors by a Positive Constant • Length changed • Direction unchanged 7 7 Scaling Vectors by a Negative Constant • Length changed • Direction reversed 8 8 Addition and Subtraction of Vectors • Summation vectors “closes the triangle” • This can be used to change direction and length 9 9 Other Properties of Vectors • Commutativity • Associativity • Distributivity of addition over multiplication • Distributivity of multiplication over addition 10 Vector Spaces • A vector space has the following properties: – Addition and subtraction is defined, and the result is another vector – The set is closed under linear combinations: • Given and – There is a zero vector the combination such that 11 Illustrating Closure and the Zero Vector 12 Examples of Vector and Vector Spaces Which of the following are vector spaces? 1. A tuple of n real numbers: 2. The zero-vector: 3. The angle displayed on a compass: 13 Answers • All of the previous examples are vector spaces apart from an angle on a compass. The reason is that it usually “wraps around” – e.g., 180 degrees negative becomes 180 degrees positive 14 Yaw Angles Measured by 3 iPhones Over Time Angle discontinuities caused by “wrap around” Summary • Vectors encode relative displacement, not absolute position • Scaling a vector changes its length, but not its direction • All vectors “live” in a vector space • We can add scaled versions of vectors together • The vector space is closed under linear combinations and possesses a zero vector • We can analyse the structure of vector spaces looking, oddly enough, at the problem of specifying the coordinates of a vector 16 16 Spanning Sets and Vector Spaces • I am given a vector • I am given a spanning set of vectors, • I form the vector w as a linear combination of S, 17 Coordinate Representation of a Vector • I want to find the set of values l1, ln such that • What properties must S obey if: – For any value of x at least one solution exists? – For any value of x the solution must be unique? • It actually turns out that it’s easier to answer the second question first 18 Uniqueness of the Solution • We want to pick a set S so that the values of l1, ln are unique for each value of x • Because everything is linear, it turns out that guaranteeing linear independence is sufficient 19 Linear Independence • The spanning set S is linearly independent if only for the special case • In other words, we can’t write any member of the set as a linear combination of other members of the set 20 Dependent Spanning Set Example • For example suppose that, where and a, b are real scalar constants • This set is not linearly independent and so will yield an ambiguous solution 21 Linearly Dependent Example • To see this, compute w from the linear combination of the vectors of S, 22 Linearly Dependent Example • Suppose we want to match a vector w which can be written as • Matching coefficients, we have three unknowns but just two equations 23 Linear Independence and Dimensionality • Therefore, if our basis set solution is not unique is linearly dependent, the • Conversely, the number of linearly independent vectors in a spanning set defines its dimension 24 Linear Independence in the Dimension of 2 25 Existence of a Solution • The condition we need to satisfy is that x and w must lie in the same vector space • Now, • Because this is closed under the set of linear combinations, it must always be the case that 26 Linear Combinations and Vector Spaces 27 Existence of a Solution • We can go a bit further • Because we know that it must be the case that 28 Existence of a Solution • We have shown that • Can’t we automatically say that • No, because what we’ve shown so far is that 29 Arbitrary S Might Not “Fill the Space” • Therefore, in this case 30 Existence of a Solution • Therefore, it turns out that a solution is guaranteed to exist only if • This means that we must have a “sufficient number” of vectors in S to point “in all the different directions” in V • This means that the dimensions of both vector spaces have to be equal 31 Vector Subspaces • Consider the set of linearly independent vectors • Are these spanning sets dependent or independent? What’s the dimension and basis of the subspace? 32 The Question… • Recall the question – for any vector and where can we find a unique set of coefficients such that 33 The Answer… • For S a basis of , we can always represent the vector uniquely and exactly • For S a basis of a subspace of , we can only represent some of the vectors exactly • Expressing the “closest” approximation of the vector in the subspace is a kind of projection operation, which we’ll get back to later 34 The Answer… 35 Summary • Vector spaces can be decomposed into a set of subspaces • Each subspace is a vector space in its own right (closure; zero vector) • The dimension of a subspace is the maximum number of linearly independent vectors which can be constructed within that subspace 36 Summary • A spanning set is an arbitrary set of vectors which comprise a subspace • If the spanning set is linearly independent, it’s also known as a basis for that subspace • The coordinate representation of a vector in a subspace is unique with respect to a basis for that subspace 37 37 Changing Basis • In the last few slides we said we could write the coordinates of a vector uniquely given a basis set • However, for a given subspace the choice of a basis is not unique • For some classes of problems, we can make the problem significantly easier by changing the basis to reparameterise the problem 38 Example of Changing Basis • One way to represent position on the Earth is to use Earth Centered Earth Fixed (ECEF) Coordinates • Locally at each point on the globe, however, it’s more convenient to use EastNorth-Up (ENU) coordinates • If we move to a new location, the ENU basis has to change in the ECEF frame Local Tangent Plane 39 Example of an ENU Coordinate System 40 Changing Basis • Suppose we would like to change our basis set from to where both basis span the same vector space 41 Changing Basis 42 Changing Basis • Since the subspaces are the same, each vector in the original basis can be written as a linear combination of the vectors from the new basis, 43 Changing Basis • Clanking through the algebra, we can repeat this for all the other vectors in the original basis, 44 Changing Basis • Now consider the representation of our vector in the original basis, • Substituting for just the first coefficient, we get 45 45 Changing Basis • Substituting for all the other coefficients gives 46 Summary of Changing Basis • Sometimes changing a basis can make a problem easier • We can carry this out if our original basis is a subspace of our new vector space • The mapping is unique, and corresponds to writing the old basis in terms of the new basis • (It’s much neater to do it with matrix multiplication) 47 So What’s the Problem with Vector Spaces? • We have talked about vector spaces – – – – They encode displacement There are rules for adding vectors together and scaling them We can define subspaces, dimensions and sets of basis vectors We can even change our basis • However vector spaces leave a lot out! 48 The Bits Which Are Missing • There are no points – There is no way to represent actual geometric objects • There is no formal definition of what things like angles, or lengths mean – Therefore, we can’t consider issues like orthogonality • We haven’t discussed the idea of an origin – Everything floats in “free space” • Affine spaces start to redress this by throwing points into the mix 49 More Missing Bits • We still don’t have a notion of distances – Just ratios on lines between points • We still don’t have a notion of angles • We still don’t have an absolute origin • These are all introduced in Euclidean geometry 50 Euclidean Spaces • • • • • Introduction Tuples Vectors and Vector Spaces Affine Spaces Euclidean Spaces 51 Euclidean Spaces • Euclidean spaces extend affine spaces by adding notions of length and angle • The Euclidean structure is determined by the forms of the equations used to calculate these quantities • We are going to just “give” these without proof • However, we can motivate the problem by considering the problem of orthogonally projecting one vector onto another vector • First, though, we need some additional vector notation 52 Some More Vector Notation • Since we are going to define lengths and directions, we can now decompose a vector into – A scalar which specifies its length – An orthonormal vector which defines its direction Length (+ve) Orthonormal vector (length=1) 53 Projecting Vectors onto Vectors • Consider two vectors space and that occupy the same affine • What’s the orthogonal projection of onto ? 54 The Answer… Projected vector 55 The Answer… Projected vector Projected vector 56 Computing the Answer • We need to compute both the direction and length of the projection vector • The direction of the vector must be parallel to • Therefore, we are going to define the orthogonal projection as Scale factor Orthonormal vector parallel to the “right direction 57 General Case of the Scalar Product • If we now let both of our vectors be non-normalised, then • The scalar product is a special case of an inner product 58 Lengths, Angles and Distances • Lengths and angles are (circularly) defined as • The distance function (or metric) between two points is the length of the vector between them, 59 Properties of Scalar Products • Bilinearity: • Positive definiteness: 60 Properties of Scalar Products • Commutativity: • Distributivity of the dot product over vector addition, • Distributivity of vector addition over the dot product, 61 Scalar Product and Projection Mini-Quiz • What’s the value of 62 Summary • The Euclidean structure is defined by the scalar product • The scalar product is used to compute the orthogonal projection of one vector onto another vector • The scalar product works in any number of dimensions • It has many useful properties including bilinearity • However, it only defines a one dimensional quantity (length) • Vector products generalise this 63 Vector Products • The vector product is the familiar cross product and is defined to be where is orthogonal to and • The vector product is a special case of an exterior product and is a pseudovector (we won’t meet these again) • The vector product is only defined in 3D (and 7D!) 64 Magnitude of the Vector Product • The magnitude of the vector product is the area of the parallelogram having the vectors as sides 65 Direction of the Vector Product • In general, in 3D we have 3 axes of rotation • However, if we rotate and such that they still lie in the same plane, still points in the same direction • Therefore, encodes information about two axes of rotation 66 Sign of the Vector Product • Given the plane defined by the vectors, there are two possible choices of the normal vector – out of or into the plane • The choice is determined by the sign of the angle between the vectors – Anticlockwise is positive 67 Right Hand Rule 68 Properties of Vector Products • Anticommutativity: • Distributivity: • Distributivity: • Parallelism: 69 Scalar Triple Product and Volumes • We have shown that: – Scalar products define lengths and angles – Vector products define areas and a sense of perpendicularity • Therefore, is it possible to extend this, at least in 3D, to the notion of a volume? • The scalar triple product computes the volume of the parallelepiped defined by three linearly independent vectors 70 Scalar Triple Product and Volumes 71 Volume of the Parallelepiped • The volume is computed as follows • This is the absolute value of the scalar triple product 72 Cartesian Frames • So far we’ve said an affine frame is simply an origin point and a set of linearly independent vectors • Now that we can talk about angles and lengths, we can define a Cartesian coordinate frame • A Cartesian Frame has the property that its basis vectors are orthonormal 73 Orthonormal Basis Set • An orthonormal basis set has the property that its vectors: – Are orthogonal to one another – Are of unit length • More compactly, 74 Illustration of the Cartesian Basis Set The basis is orthonormal 75 Cartesian Frames in 3D (Finally!) • The basis set in 3D is written using the familiar vectors, • Any vector can be written as 76 Scalar and Vector Product in the Cartesian Frame • The scalar product is given by • The vector product is given by 77 Euclidean Space • Euclidean spaces add notions of length and angles through the scalar product • These can be extended by the vector and vector triple products to give areas and volumes in 3D • The Cartesian Coordinate frame is a special case with a dedicated origin and an orthonormal basis set 78 Matrices and Their Inverses • • • • • • Introduction Matrices and Their Inverses Geometric Interpretation of SLEs The Eigendecomposition Kernel Spaces and Pseudoinverses The Singular Value Decomposition 79 Isomorphic Transformations a b c d e g h i j k a b c d e g h i j k • Recall that an isomorphic transform is one-to-one • It also possesses an inverse 80 Isomorphism and SLEs • For the isomorphic SLE the solution is • Therefore, all we need to do is: – Work out if the matrix inverse exists (=transformation is isomorphic) – And, if so, compute it 81 Properties of Isomorphism • A transformation is isomorphic iff: – The dimensions of and are the same 82 Assuming the Dimensions are the Same • For the moment, we will assume the dimensions are the same value n • Therefore, for SLE is written as 83 Properties of Isomorphism • A transformation is isomorphic iff: – The dimensions of and are the same – The transformation is one-to-one – The transformation is onto • We can analyse these by looking at basis and subspaces • However, we begin by looking at these in terms of the determinant or the metric scale factor 84 One-to-One Transformations • Consider a 2D transformation • If the transformation is one-to-one then any vector x maps to a unique vector b 85 One-to-One Transformations • If the transformation is not one-to-one, multiple values of x map to the same value of b • We can analyse this by considering projected areas 86 Transforms and Volumes One-to-One Transformation Not a One-to-One Transformation 87 Transformation Types and Areas • For an n dimensional space, suppose I choose a set of n orthonormal vectors • These define the edges of an n-dimensional hypercube with volume 1 • Then compute the set • The determinant then is given by 88 Determinants as a Signed Volume • It turns out that determinants are signed volumes and can have positive or negative values • A negative value implies that there is a reflection • This causes the rotation order of the vectors to change 89 Using the Area to Characterise the Transform • Looking at the area of the transformed set of points will tell us if the transformation is one-to-one or not – If the transformed area is zero, the transformed vectors fall on a line • It’s not one-to-one, so the transformation is not invertible • The scale factor is zero – If the transformed area is non-zero, the transformed vectors fall on a parallelogram • This is one to one-to-one, and the transformation is invertible • Right now we don’t care what the value for the scale factor is • It can be positive or negative 90 Computing the Scale Factor for a 2D Case • For the matrix it can be shown (coursework question) that 91 Example 2D Transformation • Consider the transformation • This is a pure rotation of q degrees – The volume does not change – The handedness does not change 92 Example 2D Transformation • The determinant is 93 Another 2D Example • Now consider • This is a scale along the x-axis only – The volume changes – The handedness does not change 94 One More 2D Transformation • Now consider the transformation • This is a rotation and a reflection – The volume does not change – The handedness does change 95 One More 2D Transformation • The determinant in this case is 96 Computing Determinants and Solving SLEs • We are going to describe a brute-force method for computing determinants • It’s only really used for 2x2 and 3x3 matrices – Widely useful in many image processing and geometric applications • However, it’s structure – large number of potentially parallelisable calculations – makes it suitable for implementation on an FPGA • For big matrices on normal computers, determinants and inverses are computed using other decompositions 97 Determinant of a 2x2 Matrix • The basic building block for this method is the determinant of the 2x2 matrix, 98 Determinant of a 3x3 Matrix • For a 3-by-3 matrix, Minors 99 Determinant of a 3x3 Matrix • Writing this out, 100 3x3 Matrix Determinant Mini-Quiz • Compute the determinant of 101 Answer • Expanding the terms, 102 Determinant of an nxn Matrix • For an nxn matrix, the expression for the determinant is 103 Cofactors and Minors • The cofactor is where Mjk is the determinant of an (n-1)th dimensional matrix formed by deleting the jth row and kth column • In other words, we can recursively decompose our original matrix into smaller and smaller matrices and compute the determinant on those 104 Cofactors and Minors + C11 105 Cofactors and Minors + + C22 C11 106 Cofactors and Minors + - C23 C11 107 Cofactors and Minors + + C24 C11 108 Cofactors and Minors - C12 109 Cofactors and Minors - - C34 C12 110 Cofactors and Minors - - C34 C12 111 Cofactors and Minors - + C12 112 Determinants • Show the determinant of is -3 113 Compute the Determinants in the Easiest Way • We can also compute the determinant by “pivoting” along any row • For example, we can also compute the determinant of by pivoting “along the bottom” to give 114 Useful Property of Determinants • Let A and B be square matrices of the same dimensions • Let • It can be shown that 115 More Useful Properties of Determinants • The determinant is zero if: – Any of the rows or columns are 0 – Any of the rows or columns are linearly dependent upon the other rows or columns • The determinant is unchanged if: – If row (or its multiple) is added to another row – The matrix is transposed • The determinant is negated if: – Two rows are swapped • The determinant is scaled by a factor c: – If any row or column is multiplied by a factor c 116 Proving Some Properties by Products • Consider again that and • It turns out that some of the properties of determinants can be explained by this 117 Example • From the properties of determinants, we know that adding scaled values of rows to other rows does not change the determinant, 118 Example • Now, we can decompose this into the product of two matrices 119 Example • The determinant of the transformation which adds the rows together is 120 Summary of Determinants • Determinants let us describe some properties of the SLE in terms of its volume scale factor • They have: – A magnitude which determines how much scaling happens – A sign, which indicates whether there is a reflection • We can use the determinant (metric scale factor) to show whether a transformation is isomorphic or not • We’ll now show that determinants can be used to directly solve the SLE 121 Structure • • • • • • Introduction Matrices and Their Inverses Geometric Interpretation of SLEs The Eigendecomposition Kernel Spaces and Pseudoinverses The Singular Value Decomposition 122 Systems of Linear Equations (SLEs) • One problem class which turns up very frequently is finding the solution to a linear system of equations, 123 Systems of Linear Equations (SLEs) • This can be more compactly expressed using vectors, linear transformations and matrices as • Despite their somewhat simplistic appearance, SLEs are extremely important and near-ubiquitous 124 SLEs and Linear Spaces • Recall that SLEs are normally expressed using vectors and matrices as • SLEs can be used for much more than affine, geometric concepts we’ve considered so far • The usual (implicit) assumption made with SLEs is that the space is Euclidean • Therefore, we’ll assume that things like distances and angles have been defined in the normal manner 125 Matrices and Their Inverses • • • • • • Introduction Matrices and Their Inverses Geometric Interpretation of SLEs The Eigendecomposition Kernel Spaces and Pseudoinverses The Singular Value Decomposition 126 Summary of Determinants(from last lecture) • Determinants let us describe some properties of the SLE in terms of its volume scale factor • They have: – A magnitude which determines how much scaling happens – A sign, which indicates whether there is a reflection • We can use the determinant (metric scale factor) to show whether a transformation is isomorphic or not • We’ll now show that determinants can be used to directly solve the SLE 127 Cramer’s Rule for Solving SLEs • Cramer’s rule says that we can compute the ith component of the solution to the SLE by substituting the ith column of A with b and working out the ratio of the determinants of the resulting matrices • This sounds quite a mouthful, but it’s very straightforward and a few examples show what it means 128 Cramer’s Rule for SLEs • Recall that our SLE is where A can be written as and 129 Cramer’s Rule for a 2 by 2 Matrix • For the two dimensional case, Cramer’s Rule is: Column vector inserted into the matrix 130 2x2 Case • Use Cramer’s Rule to Solve for x1 131 Example of a 2x2 Case • Using Cramer’s Rule, the solution is 132 Cramer’s Rule for a 3x3 Matrix Column vector inserted into the matrix 133 3x3 Matrix Example • Consider the 3x3 system, • Let’s solve this using Cramer’s Rule • This is exactly the same as before, but it gets somewhat messier 134 3x3 Example • First off, the determinant of the matrix is 135 Solving for the First Coordinate • Substituting for the first column, • The solution is 136 Solving for the First Coordinate • Solving the determinant, • Therefore, the solution is 137 Cramer’s Rule • The solution for the ith coefficient is the rather eye watering 138 Computational Issues • For an n dimensional matrix, Cramer’s rule requires n! operations • For example a 100 state vector would require roughly 9.3x10159 calculations • However, MATLAB does a much better job: 139 Computational Issues • The way in which MATLAB does this is far too complicated to discuss in this course – See LINPACK and LAPACK libraries if you really want to see the gory details (or CLAPACK for the C orientated) and of course Netlib • However, the basis of most of these approaches is to do some clever rearranging of the matrices • We’ll consider Gaussian elimination • This is a direct solution method which simplifies the structure of the SLE 140 Simplifying the Structure of the SLE • Recall that • The difficulty lies in the arbitrary structure of A • Gaussian Elimination seeks to solve a simpler problem with the same solution 141 The Structure of the Simplified SLE • A is square and so 142 The Structure of the Simplified SLE • Suppose we can rearrange problem so that the matrix becomes upper triangular, 143 Solving a Triangular Matrix • The reason is that, if we expand the SLE, it’s now 144 Solving a Triangular Equation • We can solve by back substitution, 145 Solving a Triangular Equation • For example, consider the equation • We can directly solve to find that 146 Arranging the SLE in Triangular Form • The first thing we do is stack the matrix and the solution vector to produce the augmented matrix • We now want to make the A part of this triangular 147 Simplifying the SLE • To simplify the SLE, recall that the determinant of a matrix does not change if we add a row (or its multiple) to another row • It can be shown that if we apply these operations to the augmented vector, the solution does not change 148 A Simple Example • Suppose our SLE is • The augmented matrix is 149 A Simple Example • Subtracting half of the first row from the second gives • Therefore, 150 A Simple Example • Since we can add and subtract any multiple of a row to another row (including itself) we can also rescale the rows to make the maths simpler • Doubling the second row, • Subtracting the first row from the second, 151 A Simple Example • Substituting, we get 152 3x3 Matrix Example • Consider the 3x3 system, • The actual solution to this equation is 153 3x3 Matrix Example • The augmented matrix is 154 3x3 Matrix Example • We can use Gaussian Elimination again • Adding the first row with the second row to the third row, we get 155 3x3 Matrix Example • If we now add the first row to the second, we have • Solving from the bottom up gives the same answer as before 156 Inconsistent Solutions • However, it is possible to have equations which are inconsistent • These cannot be solved • For example, consider the SLE 157 Inconsistent Solutions • The augmented matrix is • Adding two times the first row to the third leads to 158 Infinite Number of Solutions • It is also possible to have an infinite number of solutions to a problem • For example, consider the SLE 159 Infinite Number of Solutions • The augmented matrix is • Adding two times the first row to the third leads to 160 Infinite Number of Solutions • Subtracting seven times the first row from the second gives • We have three unknowns but only two equations, hence the system is under constrained 161 We Can Simplify Rectangular Matrices as Well • Consider the case that A is rectangular, and the number of rows do not equal the number of columns 162 Row Echelon Form • When a matrix isn’t square, we can produce matrices which are “as triangular as possible” • If n > m, we get a matrix in row echelon form, 163 Triangular Rectangular Matrices • If n < m, the row echelon form is 164 Examples of Row Echelon Matrices 165 Summary of Gaussian Elimination • Cramer’s Rule is very inefficient • Gaussian Elimination exploits the invariance of the determinant to various row operations • Matrices are rearranged into triangular forms • The solution is then linear in the dimension of the state • Solutions are either unique, inconsistent or contain an infinite number of solutions 167 Matrix Inversion Mini-Quiz • How can we use Cramer’s Rule or Gaussian Elimination to compute the inverse of A? 168 Answer • Recall the matrix inverse has the property that • Now, writing out in terms of column vectors, • Therefore, this can be written as n SLEs of the form 169 Limitations of the Inversion Methods • There are two problems with these approaches: – There might be no unique solution (=non-isomorphic) – The SLE might be invertible, but very sensitive to noise 170 Non-Invertible Matrices • A can be non-invertible for two main reasons: – The dimensions of – The dimensions of and and are the same, but A is singular are different • Furthermore, there are two possible outcomes: – There is no solution – There are an infinite number of solutions 171 Solution Sensitivity • Sometimes A can be inverted but the solution itself is extremely sensitive to errors in the SLE • Errors in the SLE can arise in two ways: – Real-world parameter errors • Both A and b might be estimated from parameters of some real world problem and these could contain errors (e.g., due to measurement noise or the wrong model being used) – Implementation errors • Many real implementations of numerical algorithms introduce subtle errors (rounding, iterative solutions with finite termination criteria, etc.) 172 Solution Sensitivity • The actual SLE we want to solve is • In the presence of noise, we are computing the solution to the approximate SLE • We would hope that the two solutions are (roughly) the same 173 Sensitivity and SLEs • Consider the harmless-looking SLE, • Computing the inverse, the solution is, 174 Sensitivity and SLEs • Now suppose we have a slightly incorrect value for , • The computed solution is 175 Sensitivity and SLEs • Now consider the equally harmless-looking SLE, • Computing the inverse, the solution is, 176 Example of a Very Sensitive SLE • Now suppose we have a slightly incorrect value for , • The computed solution is 177 Use of Matrix Decompositions • Matrix decompositions analyse the structure of the SLE in terms of properties such as: – What parts of the SLE are invertible? – What parts of it aren’t? – How sensitive is the solution? • The decompositions can be used to create new solution algorithms 178