Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
History of electric power transmission wikipedia , lookup
Flexible electronics wikipedia , lookup
Electric machine wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Electrician wikipedia , lookup
Commutator (electric) wikipedia , lookup
Electronic engineering wikipedia , lookup
Electrical substation wikipedia , lookup
Electrical engineering wikipedia , lookup
Voltage optimisation wikipedia , lookup
Alternating current wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Stray voltage wikipedia , lookup
Ground (electricity) wikipedia , lookup
Power engineering wikipedia , lookup
Electric motor wikipedia , lookup
Electrification wikipedia , lookup
Mains electricity wikipedia , lookup
Rectiverter wikipedia , lookup
Earthing system wikipedia , lookup
Light switch wikipedia , lookup
Three-phase electric power wikipedia , lookup
Induction motor wikipedia , lookup
Stepper motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Protective relay wikipedia , lookup
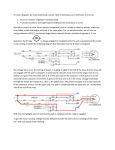
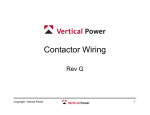
Electrical Workshop practice II –EEng -3203 2011 Push Buttons - momentary contact switches A push-button is a simple switch mechanism for controlling some aspect of a machine or a process. Buttons are typically made out of hard material, usually plastic or metal. The surface is usually flat or shaped to accommodate the human finger or hand, so as to be easily depressed or pushed. Buttons are most often biased switches, though even many un-biased buttons (due to their physical nature) require a spring to return to their unpushed state. Different people use different terms for the "pushing" of the button, such as press, depress, mash, and punch. Different types of push buttons are shown below in figure 1.1. Figure 1.1. Push –buttons Push buttons can be either normally open (NO) or normally (NC). Some types can be stacked to have multiple sets of NO and NC contacts. Open State: The pins on either side are electrically the same point. With the button released, there is no path for electrons between pins 1, 4 and 2, 3. AS&TU Page 1 Electrical Workshop practice II –EEng -3203 2011 Closed State: With the button pressed, a conductive material bridges the gap allowing electrons, and thus current, to flow. Indicator Light Symbols An indicator light (sometimes referred to as a pilot light) is a small electric light used to indicate a specific condition of a circuit. For example, a red light might be used to indicate a motor is running. The letter in the center of the indicator light symbol indicates the color of the light. Different types of push buttons are shown below in figure 1.2. Figure 1.2.Signaling lamps AS&TU Page 2 Electrical Workshop practice II –EEng -3203 2011 Electromagnetic Relays - An electromagnetic relay is a switch, which is driven electromagnetically and is used in cases of low power control. Those relays are mainly applied in control circuits, communication systems and data transmission. The structure of a relay is shown in fig.1.3. Figure .1.3.Structure of a Relay. Function: AS&TU Page 3 Electrical Workshop practice II –EEng -3203 2011 An octal base relay (like the one shown fig 1.4 below) is one of the most common electrical devices in use today. Also referred to as general purpose relays, they're widely available in both 8 and 11 pin models, with 8 being the most common. The base of the relay is designed to plug into a socket, which makes installation and replacement (if required) very easy. Figure 1.4 An octal base relay AS&TU Page 4 Electrical Workshop practice II –EEng -3203 2011 This basic relay is constructed of 5 main parts the Coil, Armature, Contacts, the Base (which consists of the socket pins), and the Molded Plastic Frame. The relay works on the principle of electromagnetic force. When the coil is energized, it becomes magnetized. The armature (made of a ferromagnetic material and in close proximity to the coil) - is attracted to the coil by this magnetic force and moves towards it until it comes to rest against the coil's iron core. Attached to the pivoting end of the armature is a spring. The purpose of the spring is to return the armature to its original position (away from the coil) when the coil is deenergized. Also attached to the armature are the arms of the movable set of contacts (the common contacts). See the illustration in fig.1.5 below: Figure 1.5 An 8 pin Relay In an 8 pin relay (as shown in fig.1.5) there are 2 common contacts, 2 normally open contacts, and 2 normally closed contacts. In an 11 pin relay, there are 3 of each of the aforementioned. These contacts are made of an electrically conductive material such as copper. The common contacts have this material embedded on both sides of the movable arms. The relationship of all of the contacts is explained as follows: AS&TU Page 5 Electrical Workshop practice II –EEng -3203 2011 The common contacts carry the supply voltage that is to be connected to another electrical device(s). In the de-energized state of the relay, these common contacts are in contact with (touching) the normally closed contacts. Before we go too far, it's important to think of a relay as an electrical switch. That is, a remote controlled switch, designed to direct the current path from one part of the circuit to another. You must also understand that although there are (in this case) 2 of each type of contact (common, normally open and normally closed), each is designed to complete a path independent and separate from the other contact of similar type. Also, when we use the term "normally closed" it means that in the normal state of the relay (de-energized) the common contacts are providing conductive paths to their normally closed contact partners and only to these contacts. At the same time, there is no completed path to the "normally open" contacts. So then, when the relay is de-energized, the common contact #1 is making contact with the normally closed contact #1 and the common contact #2 is completing a circuit path with the normally closed contact #2. When the relay is energized, the situation is reversed. Now the common contact #1 is completing a conductive path to the normally open contact #1 and at the same time, the common contact #2 is making contact with the normally open contact #2. The electrical conductive paths that did exist with the "normally closed" contacts have now been "opened". The paths no longer exist. The Pin Out connections on the base of the relay are as follows: Base of Octal Pin Relay AS&TU Page 6 Electrical Workshop practice II –EEng -3203 2011 Time Delay Relay -A time delay relay is a relay that stays ON for a certain amount of time once activated. This time delay relay is made up of a simple adjustable timer circuit which controls the actual relay. The time is adjustable from 0 about certain seconds or hours with the parts specified. Fig.1.6 and Fig.1.7 shows analog and digital display relays. Figure 1.6. Analog display relays Figure 1.7. Digital display relays Motor –Protective Relays Thermal Overload Relays: Overload protection (as shown in fig.1.8) is installed in the motor circuit and/or motor to protect the motor from damage from mechanical overload conditions when it is operating/running. The effect of an overload is an excessive rise in temperature in the motor windings due to current higher than full load current. Properly sized overload protection disconnects the motor from the power supply when the heat generated in the motor circuit or windings approaches a damaging level for any reason. Since the switch contacts remain closed if power is removed from the circuit without operating the switch, the motor restarts when power is reapplied which can be a safety concern. AS&TU Page 7 Electrical Workshop practice II –EEng -3203 2011 Thermal Overload Relays: Allow harmless temporary overloads (such as motor starting) without disrupting the circuit. Will trip and open a circuit if current is high enough to cause motor damage over a period of time. Can be reset once the overload is removed. Figure 1.8 Thermal Overload Relay AS&TU Page 8 Electrical Workshop practice II –EEng -3203 2011 2. Contactors -A contactor is an electromagnetically driven switch applied for electrical power engineering. Figure 1.9 Structure of a Contactor Function: AS&TU Page 9 Electrical Workshop practice II –EEng -3203 2011 Contactors may have different arrangements of contacts. One has to differentiate between primary contacts (main contacts) and secondary contacts (auxiliary / control contacts).as shown in the fig.2.1. Figure 2.1. Arrangements of contacts Figure 2.2 parts of a contactor AS&TU Page 10 Electrical Workshop practice II –EEng -3203 2011 Figure 2.3. A contactor with two one NO and one NC auxiliary contacts. You can control contactor circuits by timers with on –or off delay. This is important for motor control circuits like star-delta start circuit. AS&TU Page 11 Electrical Workshop practice II –EEng -3203 2011 Difference between Contactor and Relay Since a contactor is required for a higher load, a relay is always cheaper than a contactor. A relay is normally used in appliances below 5KW, while a contactor is preferred when the appliance is heavier. A relay is used only in control circuit while a contactor can be used in both control and power circuits. In general contactors are little slower than relays Contactor is so designed that it can be repaired while it is not normally done in the case of relays. AS&TU Page 12 Electrical Workshop practice II –EEng -3203 AS&TU 2011 Page 13 Electrical Workshop practice II –EEng -3203 AS&TU 2011 Page 14 Electrical Workshop practice II –EEng -3203 AS&TU 2011 Page 15 Electrical Workshop practice II –EEng -3203 2011 Motor starting Methods a) Direct-on-line starting (D.O.L). This is by far the most common starting method. The starting equipment consists of only a main Contactor and thermal or electronic overload relay as shown in fig.2.4 below. Figure 2.4 Direct-on-line starting (D.O.L). This stating method is not used for motors with power rating of greater than 5KW. Thus is due to high starting current and starting torque. AS&TU Page 16 Electrical Workshop practice II –EEng -3203 2011 D.O.L-Power and control circuit Figure 2.5 D.O.L starting power and control circuits As shown in Fig.2.5 power circuit, when the coil of the contactor energized the contactor closes the contacts and the motor receives a three phase supply. In the control circuit of Fig.2.3 separate push-buttons are provided for energising and deenergising a contactor. For starting, a push-button with an NO contact (S3) and for stopping another push-button with an NC contact (S2) is used. A normally open (NO) auxiliary contact (-K1-13-14) of the contactor is connected in parallel with the start push-button S3 so that the contactor should remain energised even when the pressure on the start push-button is with drown. Thus the contactor would continue to remain energized by receiving supply through its own contact –K1. Contact –K1 here has been used as a self-hold -on contact as it holds on the supply even after the pressure on the push-button has been released. Thus the motor continues to rotate once the start push button has been pressed. For stopping the motor S2 is pressed. Here –S1 is the emergency switch and –F5 is overload relay for overload protection. AS&TU Page 17 Electrical Workshop practice II –EEng -3203 2011 b) Star -Delta starting principle Figure 2.6 Star- delta starting contactors, push-buttons, and overload relays What is Star Delta starting? Star Delta starting is when the motor is connected (normally externally from the motor) in STAR during the starting sequence. When the motor has accelerated to close to the normal running speed, the motor is connected in DELTA. Pictures 1 and 2 show the two connections for a series connected three phase motor and fig.2.5 show the overall power circuit of star-delta. AS&TU Page 18 Electrical Workshop practice II –EEng -3203 2011 Why is Star Delta Starting used? Let’s consider an example motor: 120kW, 4 Pole, 380 Volt, Delta connected, 3 Phase, 50 Hz. To truly grasp the differences between these two starting methods, we will list the values next to each other in table. Immediately we notice the primary reasons for using star delta starters on electric motors: The starting power is reduced from 98 kW to 33 kW (by approximately 67%). The starting current is reduced from 1495 A to 500 A (by approximately 67%). Because the motor is not intended to actually run in this connection, the reduction in full load speed, power factor and efficiency is not significant for this discussion. The reason for these 67% changes becomes clear when we examine the phase voltage on the motor, we see that the phase voltage when the motor is connected in Delta is 380 Volt. When the motor is however connected in Star, the Phase Voltage will be 219.3 Volt. Thus, when the motor is started in the star connection, the phase voltage of the motor is reduced by a factor of √3. AS&TU Page 19 Electrical Workshop practice II –EEng -3203 2011 The relations for star and delta connections are as listed in a Table as follow. The reductions in starting current, starting power and starting torques for a reduced Voltage can each be calculated as follow: If we apply this equation for the star delta starting, What are the advantages of using Star Delta starting? - The most significant advantage of using Star-Delta starting is the huge reduction in the starting current of the motor, which will result in a significant cost saving on cables, transformers and switch gear. AS&TU Page 20 Electrical Workshop practice II –EEng -3203 2011 Power and Control circuit of Star-Delta starting. Figure 2.7 Power and Control circuit of Star-Delta starting As shown in the control circuit of fig.2.7 when push-button –S2 is pressed contactor –K3 energised thus, intern makes NO(13,14) of contactor –K3 to close and NC(21,22) to open, as a result contactor –K1 energised and contactor –K2 de- energised . This helps the motor to run in star connection. When push-button –S3 is pressed contactor –K3 de-energised, both –K1 and –K2 energised, and the motor operated in delta. AS&TU Page 21 Electrical Workshop practice II –EEng -3203 2011 Figure 2.8 Star- delta control circuit using timer As shown in the control circuit of fig.2.8 when push-button –S2 is pressed both contactors –K3 and –K1 energised and the motor runs in star after a pre defined time NC contact of the off delay timer (-K4T) opens, thus makes contactor –K3 to de-energise and contactors -K2 and -K1 to energise, and the motor operates in delta. AS&TU Page 22 Electrical Workshop practice II –EEng -3203 2011 Reversing a Three-Phase Motor The rotation of a three phase motor can be reversed by interchanging the connection of any motor terminals to the supply lines. As shown in the fig.2.7, two separate contactor are used for this purpose, one for forward and another for reverse operation. To prevent both the contactors from being energized simultaneously and causing a short circuit, some preventive methods called interlocking methods are employed. Two different interlocking methods generally used are described below. Figure 2.9 Power and Control circuit of motor reversing Push button interlocking Push-button interlocking is one of the methods of preventing two contactors from being energising simultaneously. As shown in fig.2.9 power circuit, through contactor –K1, the motor is fed with a three phase supply for forward rotation whereas through contactor AS&TU Page 23 Electrical Workshop practice II –EEng -3203 2011 –K2, the motor is fed for reverse direction rotation. Both the NO and NC contacts of the forward and reverse Push-button have been used. When the forward Push-button (-S3) is pressed, contactor –K1 get energized by getting supply through the NC contact of the reverse Push-button (-S2). The contactor remains energized even when the pressure on the Push-button is withdrawn as the NO contact (-K1:13-14) of the contactor –K1 is now closed (this is called self-hold-on contact). When the reverse Push-button (-S2) is pressed contactor –K1 gets de-energised first and then contactor –K2 B gets energized. This ensures that it is not possible to energise both the contactors simultaneously. Auxiliary contact interlocking In this method, interlocking is done by connecting a normally closed auxiliary contact of the forward contactor in series with the coil of the reverse contactor and vice versa, as shown in fig2.9, thus preventing simultaneous energisation of both the contactors. When the Push-button -S3 is pressed, contactor –K1 get energized and provides a threephase supply to the motor for forward operation. When pressure on the Push-button -S3 is released the contactor remains energized because of the closing of the self hold on contact -K1. It should be noted that when a contactor –K1 is energized it is not possible to energise contactor -K2 because NC of contactor –K1 is used in contactor -K2. Similarly, when contactor –K2 is energized it is not possible to energized contactor –K1 because NC of contactor –K2 is used in contactor –K1. In this circuit changing the direction of the motor is achieved either by using the stop push button in between or by using push-buttons –S2 and –S2. It is necessary to stop the motor before receiving its direction of rotation. The motor stops running when stop push-button (–S1) is pressed. Sequence start of motors Sequence control of motors is required in situations where it is necessary to start a particular motor first before the second motor can be started. This type of control is necessary where one machine, before starting must have all its auxiliary equipments operating. For example in a grinding machine, the auxiliary equipments such as the coolant pump and the lubricant pump should start operating before the rotation of the grinding wheel. AS&TU Page 24 Electrical Workshop practice II –EEng -3203 2011 Figure 2.1.1 power and control circuit of sequence start of two motors Let us consider the operation of two motors one (-K1) and two (-K2) in sequence. The condition is such that it should not be possible to start motor two unless motor one is first started. The control circuit is shown in fig.2.1.1 It is to be noted that contactor –K2 has been connected to the supply through –K1:23, 24 NO contact of contactor –K1. Hence, unless contactor –K1 is energized, which closes –K1:23, 24 NO contact, it is not possible to energise contactor –K2 by pressing Push-button S2. In the same manner it should not be possible to stop motor one unless motor two is first stopped. Hence contactor –K1 has been connected to the supply through –K2:13, 14 NO contact of contactor –K2 it is not possible to de-energise contactor –K1 by pressing Push-button S4. AS&TU Page 25