Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
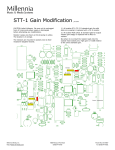
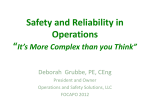
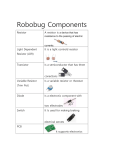
Sizing Dynamic Brake Resistors and Chopper Modules Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Dynamic Brake Module Circuit + DC Bus Fuse Bus Caps FW D D y n a m ic B ra k e R e s is to r To V o lta g e D iv id e r V o lta g e D iv id e r To V o lta g e C o n tro l To V o lta g e D iv id e r S ig n a l Com m on Chopper T ra n s is to r C ro w b a r SCR FW D To V o lta g e C o n tro l V o lta g e D iv id e r C h o p p e r T ra n s is to r V o lta g e C o n tro l Bus Caps To V o lta g e C o n tro l Fuse To C ro w b a r SCR G a te - DC Bus Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Using a Dynamic Brake or Chopper • In general, the motor power rating, speed, torque, and details of the regenerative duty cycle need to be known. • Generally, a dynamic brake can be used whenever regenerative energy is dissipated on an occasional or periodic basis. • If the drive will consistently be regenerating, serious consideration should be given to returning the power to the AC utility. Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Gather the Information First • • • • • The nameplate power rating of the motor in watts, kilowatts, or horsepower. The nameplate speed rating of the motor in rpm, or rps. The motor inertia and load inertia in kilogram-meters2, or lb-ft2. The gear ratio, if a gear is present between the motor and load, GR. The motor shaft speed, torque, and power profile of the drive application. Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Example Speed, Torque, and Power Profile (t) 0 t1 t2 t 3 t4 t1 t2 t 3 t4 t t1+ t 4 t t1+ t 4 t t1+ t 4 t T(t) 0 t P(t) t 0 t1 t2 t 3 t4 -Pb Copyright © 2006 Rockwell Automation, Inc. All rights reserved. How to Choose a Dynamic Brake / Chopper • Calculate the total inertia of the system • Calculate the peak regenerative power you need to dissipate. – This will determine the maximum allowable resistance value of the DB resistor. • Calculate the average power dissipation – This will determine the average power dissipation capacity needed in the DB resistor. • Third, check to see that the peak temperature of the dynamic braking resistor does not exceed its capacity. – Plot the Average Load and Peak Load on the curve in the sizing guide. This is necessary only on the dynamic brake modules! • Dynamic brake modules should only be used on drives 75HP and smaller. Copyright © 2006 Rockwell Automation, Inc. All rights reserved. How to Size A Dynamic Brake Module Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 1 - Total Inertia JT Jm GR xJL 2 JT = total inertia reflected to the motor shaft, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Jm = motor inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) GR = the gear ratio for any gear between the motor and load, dimensionless. JL = load inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Note: 1.0lb-ft2 = 0.04214011 kg-m2 Copyright © 2006 Rockwell Automation, Inc. All rights reserved. 2:1 = 0.5 Step 2 - Peak Regenerative Power J T x b b o Pb t3 t 2 JT = total inertia reflected to the motor shaft, kg-m2 b = max angular rotational speed, Rad/s = 2pNb/60 o = angular rotational speed, less than rated speed (can be zero) Rad/s Nb = maximum application speed in RPM t3-t2 = total time of deceleration from b to o, seconds Pb = peak braking power, watts Note: 1.0 HP = 746 watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 3 - Maximum DB Resistor Value 2 Vd Rdb1 Pb Resistor tolerances could be built in here. +/- 10% Vd = the value of DC Bus voltage that the chopper module regulates at. This value will be 375VDC or 750VDC or 937.5VDC Pb = peak braking power calculated in step 2 Rdb1 = the maximum allowable value for the dynamic brake resistor Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 4 - Choose the Correct DB Module • KA005 - 28 ohms, 666 watts • KA010 - 13.2 ohms, 1650 watts • KA050 - 10.5 ohms, 7000 watts • KB005 - 108 ohms, 1500 watts • KB010 - 52.7 ohms, 2063 watts • KB050 - 10.5 ohms, 7000 watts • KC005 - 108 ohms, 1500 watts • KC010 - 52.7 ohms, 2063 watts • KC050 - 15.8 ohms, 8000 watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 5 - Estimate the Average Power (t3 t2 ) Pb Pav x t4 2 b o b Pav = average dynamic brake resistor dissipation, watts t3-t2 = elapsed time to decelerate from b speed to o speed, seconds t4 = total cycle time, seconds Pb = Peak braking power, watts b = maximum motor speed, Rad/s o = a slower motor speed, Rad/s Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 6 - Percent Average Load Pav AL x100 Pdb AL = Average Load in percent of Dynamic Brake Resistor Pav = Average dynamic brake resistor dissipation calculated in step 5, watts Pdb = Steady state power dissipation capacity of the selected dynamic brake module Step 7 - Percent Peak Load Pb PL x100 Pdb PL = Peak Load in percent of Dynamic Brake Resistor Pav = Peak braking power calculated in step 2, watts Pdb = Steady state power dissipation capacity of the selected dynamic brake module Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 8 - Plot AL and PL on Curves KA, KB, KC Transient Power Capacity 600 600 500 Power, % 400 P d3 ( t ) 300 200 100 107.544393 0 0.5 1 2 3 4 5 6 t Time, seconds Copyright © 2006 Rockwell Automation, Inc. All rights reserved. 7 8 9 10 10 How to Select a Chopper Module and Dynamic Braking Resistor Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 1 - Total Inertia JT Jm GR xJL 2 JT = total inertia reflected to the motor shaft, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Jm = motor inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) GR = the gear ratio for any gear between the motor and load, dimensionless. JL = load inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Note: 1.0lb-ft2 = 0.04214011 kg-m2 Copyright © 2006 Rockwell Automation, Inc. All rights reserved. 2:1 = 0.5 Step 2 - Peak Regenerative Power J T x b b o Pb t3 t 2 JT = total inertia reflected to the motor shaft, kg-m2 b = max angular rotational speed, Rad/s = 2pNb/60 o = angular rotational speed, less than rated speed (can be zero) Rad/s Nb = maximum application speed in RPM t3-t2 = total time of deceleration from b to o, seconds Pb = peak braking power, watts Note: 1.0 HP = 746 watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 3 - Maximum DB Resistor Value 2 Vd Rdb1 Pb Resistor tolerances could be built in here. +/- 10% Vd = the value of DC Bus voltage that the chopper module regulates at. This value will be 375VDC or 750VDC or 937.5VDC Pb = peak braking power calculated in step 2 Rdb1 = the maximum allowable value for the dynamic brake resistor Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 4 - Choose the Correct Chopper Module Vd I d1 Rdb1 Id1 = the minimum current flowing through the chopper module transistor Vd = the value of the DC bus voltage, see step 3 Rdb1 = the maximum allowable value for the dynamic brake resistor Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 5 - Minimum DB Resistor Value Rdb 2 Vd Id 2 Rdb2 = the minimum value of the dynamic brake resistor Vd = the value of the DC bus voltage, see step 3 Id2 = the value of the current rating for the chopper module Step 6 -Choosing DB Resistor Value Copyright © 2006 Rockwell Automation, Inc. All rights reserved. About Duty Cycle Given that a resistor cools off in about 15 minutes, if cycle time minus the decel time exceeds 900 then using the larger cycle time can’t be used for calculating average power. (t) 0 t1 t2 t 3 t4 t1+ t 4 t T(t) Let’s say that I decel in 10 seconds every hour. That would be 10 / 3600 or 0.002777 times the peak power. What if I decel in 50 seconds once a day? Or 60 seconds once a week? 0 t1 t2 t 3 t4 t1+ t 4 t If t4 t3 t2 900 then t4 900 t3 t2 P(t) Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 7 - Estimate Resistor Wattage (t3 t2 ) Pb Pav x t4 2 b o b Pav = average dynamic brake resistor dissipation, watts t3-t2 = elapsed time to decelerate from b speed to o speed, seconds t4 = (adjusted) total cycle time, seconds Pb = Peak braking power, watts b = maximum motor speed, Rad/s o = a slower motor speed, Rad/s Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 8 – Calculate Watt-Seconds Pb Pws t3 t 2 x 2 Pws = required watt-seconds of the resistor t3-t2 = elapsed time to decelerate from b speed to o speed, seconds Pb = Peak braking power, watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. How to Size a resistor for PowerFlex 70/700 Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 1 - Total Inertia JT Jm GR xJL 2 JT = total inertia reflected to the motor shaft, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Jm = motor inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) GR = the gear ratio for any gear between the motor and load, dimensionless. JL = load inertia, kilogram-meters2 (kg-m2) or pound-feet2 (lb-ft2) Note: 1.0lb-ft2 = 0.04214011 kg-m2 Copyright © 2006 Rockwell Automation, Inc. All rights reserved. 2:1 = 0.5 Step 2 - Peak Regenerative Power J T x b b o Pb t3 t 2 JT = total inertia reflected to the motor shaft, kg-m2 b = max angular rotational speed, Rad/s = 2pNb/60 o = angular rotational speed, less than rated speed (can be zero) Rad/s Nb = maximum application speed in RPM t3-t2 = total time of deceleration from b to o, seconds Pb = peak braking power, watts Note: 1.0 HP = 746 watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 3 - Maximum DB Resistor Value 2 Vd Rdb1 Pb Resistor tolerances are built into the minimum resistances for each individual drive Vd = the value of DC Bus voltage that utilizes the full capability of the drive. 395VDC or 790VDC or 987VDC Pb = peak braking power calculated in step 2 Rdb1 = the maximum allowable value for the dynamic brake resistor Copyright © 2006 Rockwell Automation, Inc. All rights reserved. About Duty Cycle Given that a resistor cools off in about 15 minutes, if cycle time minus the decel time exceeds 900 then using the larger cycle time can’t be used for calculating average power. (t) 0 t1 t2 t 3 t4 t1+ t 4 t T(t) Let’s say that I decel in 10 seconds every hour. That would be 10 / 3600 or 0.002777 times the peak power. What if I decel in 50 seconds once a day? Or 60 seconds once a week? 0 t1 t2 t 3 t4 t1+ t 4 t If t4 t3 t2 900 then t4 900 t3 t2 P(t) Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 7 - Estimate Resistor Wattage (t3 t2 ) Pb Pav x t4 2 b o b Pav = average dynamic brake resistor dissipation, watts t3-t2 = elapsed time to decelerate from b speed to o speed, seconds t4 = (adjusted) total cycle time, seconds Pb = Peak braking power, watts b = maximum motor speed, Rad/s o = a slower motor speed, Rad/s Copyright © 2006 Rockwell Automation, Inc. All rights reserved. Step 8 – Calculate Watt-Seconds Pb Pws t3 t 2 x 2 Pws = required watt-seconds of the resistor t3-t2 = elapsed time to decelerate from b speed to o speed, seconds Pb = Peak braking power, watts Copyright © 2006 Rockwell Automation, Inc. All rights reserved. More discussions: Intermittent overhauling loads. Doubling up chopper units. Copyright © 2006 Rockwell Automation, Inc. All rights reserved.