Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Ground loop (electricity) wikipedia , lookup
Printed circuit board wikipedia , lookup
Power engineering wikipedia , lookup
History of electric power transmission wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Electrical ballast wikipedia , lookup
Power inverter wikipedia , lookup
Stray voltage wikipedia , lookup
Electrical substation wikipedia , lookup
Voltage regulator wikipedia , lookup
Current source wikipedia , lookup
Earthing system wikipedia , lookup
Voltage optimisation wikipedia , lookup
Surface-mount technology wikipedia , lookup
Power electronics wikipedia , lookup
Surge protector wikipedia , lookup
Buck converter wikipedia , lookup
Flexible electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Integrated circuit wikipedia , lookup
Alternating current wikipedia , lookup
Current mirror wikipedia , lookup
Mains electricity wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
ECE FINAL
PRESENTATION
ADRIENNE PREEYA AISLING SHEA
Adrienne
Coulter
Aisling
Casey
Preeya
D’Mello
Shea
Cassidy
(& Kangaroo
Friend)
SENSOR CHARACTERIZATION
• Sonar Sensor
• Uses “echoes” of sound waves to locate an
object’s distance
• The closer the distance, the larger the reading on
the handy board
SONAR SENSOR CODE
void main()
{
int range=0;
printf("\n Sensor Sample Program");
while(!start_button()); // Press Start Button
while(1)
// Continue infinitely
{
sleep(0.5);
range = sonar();
printf("\nOutput is %d", range);
}
}
SENSOR CHARACTERIZATION
Sonar Reading
1200
1000
800
600
400
200
0
0
5
10
15
20
25
30
35
40
45
SENSOR CHARACTERIZATION
• Light Sensor
• Records the darkness/lightness of on object or scale, and
converts them into readings
• Complete black was 100% on the scale, while complete white
was 0%
• Low values indicate bright light, while larger values indicate
low light
LIGHT SENSOR CODE
void main()
{
int sensor1=0;
printf("\n Light Sensor Sample");
while(!start_button()); // Press Start Button
while(1)
{
sleep(0.5);
// Continue infinitely
sensor1=analog(4);
// Reads the signal coming from
analog port 4.
printf ("\n LightSensor%d", sensor1);
}
}
SENSOR CHARACTERIZATION
Light Reading
200
180
160
140
120
100
80
60
40
20
0
0
1
2
3
4
5
6
7
8
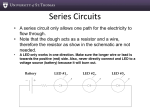
CIRCUITS
• To begin our work with circuits, we calculated the
theoretical values of voltage drops, current and
resistance in various prompted circuits
• Ohm’s Law: V=IR
• We distinguished parallel and series circuits
• Resistance in series: Req= R1 + R2
• Resistance in parallel:1/Req=1/R1+1/R2
DC CIRCUITS
• Materials for DC: breadboard, resistors, a diode, a DC
Power Supply, and a multimeter.
• The breadboard was the main component of the circuit.
• Resistors and diodes were used to build parallel and
series circuits.
• Once the circuit was built we hooked up a DC Power
Supply to the bread board using wires. This sent current
throughout the bread board.
• We used wires to connect a multimeter to our
breadboard. The multimeter measured the voltage
across each resistor, current through the circuit and
resistance.
AC CIRCUITS
• Materials for AC: BNC cable, a banana, 2 minigrabbers, a function generator for AC current and
an oscilloscope.
• We connected the circuit to the function generator
for an AC power source supply, and analyzed the
graph of the current on the oscilloscope.
• We determined the frequency and amplitude
(voltage) for the various circuits.
INSTRUMENTATION
DC Power Supply
Multimeter
Supplies power to a circuit.
Between -25V and 25V
Measures current, voltage and
resistance through a circuit
INSTRUMENTATION
Oscilloscope: measures and graph how voltage changes with time
MULTISIM
• In this lab we further
explored the mechanisms
of circuitry. We built
virtual circuits that we
could test without having
to physically build them.
We used a virtual
multimeter to measure
the voltage and current
through each circuit. We
then used a virtual
oscilliscope to see how
the voltage changed
over the course of time.
AM RADIO LAB
• Materials: printed circuit
board, resistors,
capacitors,
semiconductors, & other
parts
• We soldered in order to
connect the wires in the
circuit. This required a
soldering iron, solder, and
dexterity.
• We picked up a news
station and a latin music
station.
AM RADIO LAB
ARDUINO LAB WEEK 1
• In this lab, we built a
circuit and became
familiar Arduino to
program an LED to
light up with varying
levels of brightness
and colors.
LED CODE
int REDPin = 3;
// RED pin of the LED to PWM pin 3
int GREENPin = 5; // GREEN pin of the LED to PWM pin 5
if (brightness <= 0 || brightness >= 255)
the direction of the fading
{
int BLUEPin = 6;
increment = -increment;
// BLUE pin of the LED to PWM pin 6
}
int brightness = 0; // LED brightness
int increment = 5; // brightness increment (changing this will
change the smoothness of transitions)
// reverse
brightness = constrain(brightness, 0, 255); //function
which limits a value to a range
analogWrite(REDPin, brightness);
void setup()
//analogWrite(GREENPin, brightness);
{
pinMode(REDPin, OUTPUT);
analogWrite(BLUEPin, brightness);
pinMode(GREENPin, OUTPUT);
//blue pin value refresh
pinMode(BLUEPin, OUTPUT);
//blue pin mode definition
}
delay(2); // wait for 20 milliseconds to see the
dimming effect
void loop()
}
{
brightness = brightness + increment; // increment brightness for
next loop iteration
LED
ARDUINO LAB WEEK 2
• We used our
programming skills
from the previous
part to program a
motor to rotate
based on its light
sensitivity.
MOTOR CODE
int servoPin = 4;
//variable to store the servo pin number
int pulse = 700;
//variable to store the pulse duration
void setup()
{
pinMode(servoPin, OUTPUT);
//set the servo pin as an output
Serial.begin(9600);
//set serial data transfer rate
digitalWrite(servoPin, HIGH);
//send 5V to the servo
}
void loop()
{
delayMicroseconds(pulse);
}
//for pulse microseconds
digitalWrite(servoPin, LOW);
//send 0V to the servo
delay(20);
//for 20 milliseconds
CONCLUSION
ECE 1020
Section 30
Aisling Casey
Shea Cassidy
Adrienne Coulter
Preeya D’Mello
• Worked as a team
to execute these
projects
• Consulted with one
another when
faced with a
complication or
problem