Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
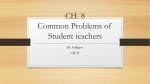
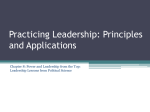
Flocking and Group Behavior Brian Salomon Papers • Reynolds, C.W. Flocks, Herds, and Schools: A Distributed Behavioral Model. Computer Graphics, 21(2):25-34,1987. • Tu, X., and Terzopoulos, D. Artificial Fishes: Physics, Locomotion, Perception, Behavior. In Computer Graphics: Proceedings of SIGGRAPH 94, 43--50, 1994. Reynolds Birds Motivation • Flocks are interesting because – Overall fluid movement from discrete actors – Emergent Behavior • Purpose – Higher level animation – Automatic constraint satisfaction Boids • Bird-oid • Oriented particles • Rendered as a geometric shape • Independent computation: “distributed” Movement • Coordinate System travels with boid y z x • Intermittent translation and rotation about X and Y, not a real flight model, no notion of lift, gravity • Speed may not exceed certain limit through viscous damping, acceleration may not exceed fraction of max speed. • Banking, keeps negative Y pointing in direction of acceleration (including gravity) Flocking • Reason for flocking – Predator protection – Finding food – Mating opportunities • Flocking in nature is scalable – Schools of fish 17 miles long with millions of fish – Implies O(1) complexity Simulated Flocking • Three behaviors – Collision Avoidance (other boids and obstacles) – Velocity Matching – Flock Centering (move towards centroid of neighbors) • Algorithm is O(N2). More on this later. Diagrams from Craig Reynolds’ boids page Behaviors • Each behavior produces a normalized vector and an importance [0,1] • Strict priority order as opposed to averaging • Once magnitude is used up subsequent behaviors have no say Simulated Flocking, cont’d Flocks may split when obstacle encountered, but may not rejoin – Not realistic (more like fish in murky water) – Actual birds use long range vision: Rate of propagation of maneuvers can be as high as 3 times startle reaction time Perception • Complete knowledge led to unrealistic behavior. Flocking requires locality. • Boid surrounded by a zone (sphere) of sensitivity. Specified by two parameters, radius and exponent (1/rn falloff up to rmax). • Found n=1 was unnatural but n=2 worked well. Vague notion of gravity vs spring, seems like hackery Scripting, “Going Z for the Winter” • Want more control • Add a point of attraction or direction of movement – Can be position dependent – Can only apply to certain boids – Can change over time Environmental Obstacles • Don’t want simple repulsion because it is OK to be near obstacles, just don’t want to fly at them. • Algorithm: – Look along Z for obstacles – If found find nearest silhouette point and add 1 body length, use this radial vector for collision avoidance • Works for obstacles that are spheres, cylinders, planes, boxes Complexity Described algorithm is O(N2) but: – Treating each boid as a separate computer changes complexity to O(N) – Could use spatial decomposition to achieve O(1) Results Some Applets: http://www.red3d.com/cwr/boids/ http://members.ozemail.com.au/~dcrombie/project/applet.html Tu and Terzopoulos Fish Motivation • Schooling and other behaviors – Eating – Wandering – Mating • Memory • More accurate Perception • Physically based motion Fish Model • 23 Nodes, 91 Springs, 12 Contractible Springs diagram from the paper Physical Simulation xi(t)=[xi(t), yi(t), zi(t)] v(t)=dx/dt a(t)=d2x/dt2 Si,j ~ spring between nodes i and j li,j ~ resting length ci,j ~ spring constant fsi,j ~ force from spring Si,j on node i, fsj,i= -fsi,j ri,j=xj(t)-xi(t) ei,j=|ri,j|-li,j fsi,j=ci,jei,j(t)ri,j/|ri,j| Physical Simulation, cont’d mi(d2xi/dt2) + i(dxi/dt) – wi=fwi fwi ~ external forces wi ~ sum of spring forces Sparse Matrix, integrated using Implicit Euler. External Forces for Swimming • When fish swings tail left to right water is displaced. Moving water applies force to tail proportional to volume of water displaced. • Instantaneous force is proportional to -∫s(n·v)nds s ~ surface v ~ relative velocity of surface to water n ~ surface normal • Approximate by triangulating surface with vertices at nodes. Use f=min(0, -A(n·v)n) and give 1/3 force to each node of triangle. A = triangle area. Muscles • Contract resting length (li,j from previous slide) up to lmini,j • To swim contract one side while relaxing other in periodic manner • To turn contract one side sharply and then slowly relax • There are three muscle sections with four muscles each. Swimming uses front two groups, turning uses back two. Motor Controllers • According to Paper only 3 motor controllers (Swim, Turn-Left, Turn-Right). – move muscles by specifying amplitude and frequency for two muscle sections to generate muscle movements described on previous slide – For Swim empirically found maximum speed parameters and specify rest in terms of max – For turn found params for 30 °,45 °,60 °,90° turn. Interp for turns in between these values. Multiple turns for greater than 90° . • But, next section talks about using pectoral fins for braking, rising, etc. No mention of how this fits into the controllers. Presumably these are used by the swim controller. Perception • Vision – Cyclopean – solid angle of 300 – Lookup properties of visible objects. – Access to shading information – Average whole picture for “light” perception – Effective radius determined by murkiness • Temperature Mental State Three functions determine the mental state of a fish • Hunger: H(t) = min[1-ne(t)R(∆tH)/,1] – ne(t) ~ amount of food eaten – R(x) = 1 – p0x po ~ rate of digestion – ∆tH ~ time since last meal – ~ appetite Mental State, cont’d • Libido L(t) = min[s(∆tL)(1-H(t)), 1] – s(x) = p1x p1 ~ libido constant – H is hunger from previous slide – ∆tH ~ time since last mating • Fear F(t) = min[Do/di(t), 1] – Do = 100 – di(t) = distance to visible predator i diagram from paper Intentions Focuser selects target of intention if necessary Behavior • Intentions generate behaviors • Behaviors use muscle controllers • Behaviors: – – – – – – – – avoiding-static-obstacle avoiding-fish eating-food mating leaving wandering escaping schooling • Some have sub-behaviors (chase-target sub-behavior of eating-food) Schooling Results http://mrl.nyu.edu/~dt/animat-vision/ Questions/Comments?