Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Flip-flop (electronics) wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Audio crossover wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Index of electronics articles wikipedia , lookup
Standing wave ratio wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Integrating ADC wikipedia , lookup
Two-port network wikipedia , lookup
Zobel network wikipedia , lookup
Power electronics wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Positive feedback wikipedia , lookup
Wilson current mirror wikipedia , lookup
Radio transmitter design wikipedia , lookup
Schmitt trigger wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Regenerative circuit wikipedia , lookup
Current mirror wikipedia , lookup
Phase-locked loop wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Opto-isolator wikipedia , lookup
Negative feedback wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
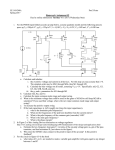
Physics 160 Lecture 16 R. Johnson May 20, 2015 Behavior, Limitations of Real Op-amps • • • • • • • • • • Input offset voltage Input current, and input-current mismatch – Design to minimize voltage offsets from this current – Input offset current See the data sheet for the Temperature dependences LF411 (posted on the course Slew rate web page) page). – e.g. correcting crossover distortion Frequency range (gen. purpose op amps are not for high frequencies) Voltage gain and phase shift – Stability! CMRR and Common-mode input range Input impedance with negative feedback is extremely high Output impedance with negative feedback is very low – What is really relevant is the limitation on output current drive Output range (how close can the output get to the supply rails?) – Single-supply op amps; can the output slew all the way to zero? May 20, 2015 Physics 160 2 Offset Voltage and Input Current • Offset voltage – 2 mV max. for the 411 • This is the effective mismatch at the input. At the output it gets multiplied lti li d b by th the gain! i ! – Trimming + V+ U1 3 7 V1 15 OS2 2 - V- OUT OS1 6 1 R2 4 LM741 5 V2 – Temperature and time drifts • 10k 15 I Input t currents t (esp. ( for f BJTs) BJT ) – Balancing resistors on inputs – Input offset current • A/C Amp: reduce DC gain to unity to minimize offset effects May 20, 2015 Physics 160 3 Slew Rate • 411 can slew outputs up to 15 V/s with no capacitive load – For a 1 V sine wave output, for example, this limits the frequency to 2.4 MHz to avoid “harmonic” harmonic distortion. – Recall the limits on using an op-amp to cure crossover distortion 2.4 10 6 Hz 2 1V 15 10 6 V/s 4 Q1 3 + V+ V1 15Vdc OUT V3 1k - LM324 V 11 2 Q2N3904 1 V- R1 VOFF = 0 VAMPL = .2 FREQ = 10000 U1A Q2N3906 Q2 R2 10k V2 15Vdc May 20, 2015 Physics 160 Above ~100 Hz the op-amp cannot slew fast enough to cure the cross-over di t ti distortion. 4 OP-AMP OP AMP STABILITY May 20, 2015 Physics 160 5 Gain and Phase Shift Open loop gain of 100,000 Gain (dB B) Dominant Pole LM301A Op-Amp (uncompensated) Second Pole Unity gain Frequency May 20, 2015 Physics 160 6 Stability Criterion • If the loop gain is >1 when the phase shift around the negative feedback loop hits 180 degrees, then the circuit will oscillate. – Your negative feedback becomes positive feedback at high frequency! – You probably won’t see the oscillation in a PSpice transient simulation without doing extra work to introduce real-life effects, plus some stimulus to initiate the oscillation. Don’t be fooled by trusting your computer simulation too much! A B • Remember, the loop gain is AB, where A is the open-loop gain, and B is the gain of the negative feedback. – The follower has B=1, so that is usually the worst-case scenario for stability (inverting amp usually has B<1) • (A loop with B>1 is even more dangerous, hence the caution about b t putting tti a capacitor it across th the ttransistor i t iin th the log-amp l feedback.) May 20, 2015 Physics 160 7 Phase LM301A Op-Amp (uncompensated) Gain ((dB) The open-loop gain is >0 dB at 180 degrees phase shift, so this op-amp will surely oscillate if used as a follower without compensation. p This doesn’t include additional phase shifts that might exist in the feedback network! Frequency May 20, 2015 Physics 160 8 Compensated Op-Amp Deliberately D lib t l enhance h the Miller effect to move the dominant pole to lower frequency R C Miller effect at this gain stage produces the dominant pole May 20, 2015 Physics 160 9 External Compensation Advantage Ad t off external compensation: you don’t need to compensate as much if B<1, so you can have higher frequency performance. Cs=30 p pF According to this formula from the data sheet, to make a follower with R1>>R2 follower, R1>>R2, C1 needs to be at least equal to Cs. Cs May 20, 2015 Physics 160 10 Simulation of Follower Instability Insignificant load, load like a ×10 scope probe. + V+ V U5 V1 OUT C1 VS 2 - V- 15Vdc 5 6 1 V 8 LM301A 4 V1 = 0 V2 = 0.2 TD = 0.1u TR = 10n TF = 10n PW = 10u PER = 10m B C2 3 7 Square wave input CL 0.1pF RL 10Meg CC 1p V2 R2 15Vdc 10Meg Should be 30pF for compensation at unity gain (B=1). May 20, 2015 Physics 160 11 Simulation of Follower Instability This sortt off ringing Thi i i iin th the simulation should be a warning that in real life it is probably going g g to oscillate wildly! y May 20, 2015 Physics 160 12 Simulation of Follower Instability With capacitive load CL on output increased to 1nF! May 20, 2015 Physics 160 13 Gain (dB) Phase LM301a with 30pF Single-Pole Compensation Rule of thumb: add enough capacitance such that the loop gain drops to 0 dB at or below the 3dB frequency of the 2nd pole. I have p plotted the forward g gain,, but remember that for a follower, the loop gain equals the forward gain. Frequency May 20, 2015 Physics 160 14 Finite Gain Effects and Bandwidth D tto internal Due i t l compensation. ti For a single pole, the gain falls as 1 over the frequency. The bandwidth (f3dB) times the gain (G) will always equal a constant gain-bandwidthproduct (fT). ) May 20, 2015 Physics 160 15 Pure Differentiator R1 100k V2 + V+ U1 3 7 15Vdc OUT 2 V4 May 20, 2015 B1 5 6 1 V LF411 4 1Vac 1V 0Vdc Rises 6dB/octave! Remember that this circuit is unstable at high frequency. 15Vdc .01uF - V- C2 Voltage gain = jRC B2 This is a good example of instability that occurs when negative feedback becomes positive feedback at high frequency. V1 0 Physics 160 16 Spice AC-sim: gain rising at 6dB/octave (20 dB/decade) dB/d d ) 90 phase shift from principal pole 411 open-loop gain Gain n (dB) The curves would cross at about 35kHz. At that point the gain must turn over, but also, there will then be an additional 90 p phase shift from the feedback network. May 20, 2015 Frequency Physics 160 17 Phase Shifts Around the Loop This low-pass filter gives a 90 degree phase shift! = 270 at low f = 360 at high f (>35 kHz) R1 100k Break the loop here. C2 May 20, 2015 B1 3 + V+ OUT 0 U1 B2 1 6 5 = 180 at low f = 270 270 at high f (>35 kHz) 7 The source looks like a low impedance to ground. V- =0 LF411 2 - 4 .01uF 0 Physics 160 18 Phase (d (deg) Spice AC-sim up to high frequency: Gain n (dB) Resonance at about 35 kHz! May 20, 2015 Frequency Physics 160 19 Transient Simulation with Square-Wave Input R1 100k V2 + V+ U1 3 7 15Vdc OUT 2 V5 B1 5 6 1 V LF411 4 V1 = 0 V2 = 0.1 TD = 50n TR = 1n TF = 1n PW = 0.5m PER = 1m - V- C2 .01uF B2 V1 15Vdc May 20, 2015 0 Physics 160 20 Transient Simulation with Square-Wave Input Input 34 kHz oscillation O tp t Output May 20, 2015 Physics 160 21 Add a 1k Resistor in Series with the Cap R1 100k V2 2 V5 May 20, 2015 B1 6 1 V LF411 This resistor keeps p the cap p from shifting the phase by a full 90 when going around the loop. V1 15Vdc - 5 4 V1 = 0 V2 = 0.1 TD = 50n TR = 1n TF = 1n PW = 0.5m PER = 1m .01uF 1k B2 OUT R2 V- C2 + V+ V U1 3 7 15Vdc 0 Physics 160 22 Phase (deg) Low-Pass Filter with Extra Resistor Gain (dB) G Never gets g all the way to a 90 phase shift. in out R3 100k V V1 1Vac 0Vdc R2 1k Frequency C1 0.01uF Looks like a simple voltage divider at high frequency May 20, 2015 Physics 160 23 With 1k Resistor in Series with Cap Spice simulation of the differentiator with a square wave input. i t Now we see just the derivative of the square wave (no oscillation). May 20, 2015 Physics 160 24 No more resonance Gain n (dB) Phase (d deg) With 1k Resistor in Series with Cap Frequency May 20, 2015 Physics 160 25 Lab Differentiator Circuit C1 0.1n Added cap here gives even a little more phase margin R1 100k V2 2 V3 .01uF V - B1 5 6 1 V LF411 4 V1 = 0 V2 = .1 1 TD = 0 TR = .5m TF = .5m PW = 0.5m PER = 2m 1k B2 OUT C2 V- R2 + V+ + U1 3 7 15Vdc Ordering of R2 and C2 doesn’t matter. V1 15Vdc May 20, 2015 0 Physics 160 26 Differentiator without feedback capacitor The g gain turns over at about 35 kHz, as expected. May 20, 2015 Physics 160 27 Differentiator with feedback capacitor Turn-over lowered from 35 kHz to 14 kHz May 20, 2015 Physics 160 28 Input and Output Impedance • Differential input impedance – For a non-inverting amp, it is boosted by a factor of (1+AB) to near infinity due to negative voltage feedback. Thus it becomes an insignificant parameter. (Remember: AB=“loop gain”.) • Output impedance: 40 ohms for the 411 without feedback – For a real application the output impedance depends on the feedback network (low for V source; high for I source) – With negative voltage feedback the output impedance drops by a factor of 1/(1+AB) to such a low value as to become insignificant. The maximum current drive of the output stage is then the much more relevant parameter. • Maximum output current and output swing – 411 11 can go ffrom VEE+2V 2 to VCC2V 2 with a 1 kohm load – Single-supply op-amps (e.g. LM358) can swing from ground to close to the positive rail (but typically they can only reach ground if they don don’tt have to sink too much current current, e e.g. g <50 A). A) May 20, 2015 Physics 160 29 Op-Amp Example (Single Supply) Details of the current references and mirrors are not shown. High Gain DC-coupled diff differential ti l amp. IIncreases Miller Mill effect ff t to kill gain at high frequency (for stability) Short-circuit protection Pushpull output t t LM324 Darlington 2nd stage amp (common (commonemitter) 2 emitter f ll followers May 20, 2015 Physics 160 Helps to pull the output all the way to ground. 30 Input and Output Impedance • Input impedance without feedback. Non-inverting amplifier (voltage, or series, feedback) – Zin gets increased by (1+AB) – Zout gets decreased by 1/(1+AB) V A G out Vin 1 AB Vin BVout Vin I in Ri Ri (1 AB) Zin Differential gain = A Output impedance without feedback. Suppose Vin 0 and apply V at output. Amp sees 0 BV across its 2 inputs. V ( ABV ) 1 AB I out V R0 R0 1/Z out May 20, 2015 Physics 160 31 Input and Output Impedance • Inverting amp (shunt feedback) Zin reduced by 1/(1+A) Iin R1 2 V- In 4 R2 - Out 8 + 1 V+ OUT 3 V V V (1 A) I in in out in R2 R2 Impedance into the amp input itself is so high that we can ignore it here. It is in parallel with R2/(1+A), which is tiny. T Transresistance it Amp A 0 2 - + 1 Out V+ OUT 3 Z in R1 V- R1 R2 R1 1 A 8 In 4 R2 0 May 20, 2015 The output impedance of the inverting amp is the same as for the noninverting amp. In both cases the voltage is sampled at the output and fed back. Physics 160 32 Output Impedance • Current source (current sampling) The feedback is using R3 to sample the output current. 15.00V 1.020mA R1 R3 470 2.7k 3 V1 12 25V 12.25V -28.05pA 28 05pA + 7 12.25V V+ V U6 B2 OUT 2 -28.05pA - B1 M1 6 8.629V VP1310 1 LF411 Vout 4 9.064mA V- 15Vdc 5 R2 8.793V 5.862mA RL 12k 1.5k 0V The op-amp output uses the MOSFET gm to control the current. V2 15Vdc 2.170mA -15.00V When Vout changes from 0 to 11.5V, the current changes from 5.86209625 mA to 5.86209775 mA. Z out May 20, 2015 11.5 1.5 10 Physics 160 9 7.7 G !! 33 Some additional circuits studied in the lab: ACTIVE RECTIFIERS May 20, 2015 Physics 160 34 Active ½ Wave Rectifier U1 3 + 7 Negative feedback exists here only when the op-amp output swings positive! V+ V2 15Vdc The input does not need to exceed a diode drop p to g get a non-zero output. B2 2 - VV OUT B1 5 6 1 V LF411 V3 4 VOFF = 0 VAMPL = 0.5 FREQ = 100 D1 D1N914 V R2 10k This is very similar to how we removed d th the di diode d drops of the push-pull output stage by using g feedback. negative V1 15Vdc May 20, 2015 Physics 160 35 Active Rectifier Transient Simulation Op-Amp Output 100 Hz Negative feedback No feedback Rectifier Output Glitch May 20, 2015 Physics 160 36 Active Rectifier Transient Simulation Op-Amp Output 10 kHz Rectifier Output May 20, 2015 Physics 160 37 Improved Active ½ Wave Rectifier R1 10k V2 V 15Vdc 3 + 7 B1 5 D1N914 6 1 LF411 4 V3 - V- 2 VOFF = 0 VAMPL = .5 FREQ = 10k B2 OUT R2 10k D1 V+ V U2 D2 D1N914 V1 15Vdc 15Vd May 20, 2015 Physics 160 D2 provides a feedback path when the op-amp output swings negative, keeping the op amp from trying to swing all the way to VEE. 38 Improved Active Rectifier Op-Amp Output 10 kHz Note how the op amp no longer has to swing g down to 15V, so the requirements on slew rate are much relaxed. relaxed Rectifier Output Note the inversion with respect to the previous circuit. May 20, 2015 Physics 160 39