Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
History of electric power transmission wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Ground (electricity) wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Current source wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Stray voltage wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Power inverter wikipedia , lookup
Two-port network wikipedia , lookup
Integrating ADC wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Voltage regulator wikipedia , lookup
Alternating current wikipedia , lookup
Voltage optimisation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Schmitt trigger wikipedia , lookup
Buck converter wikipedia , lookup
Mains electricity wikipedia , lookup
Current mirror wikipedia , lookup
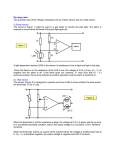
Riotech Instruments Ltd LLP VTU1X-102 Installation Guide i Contents Introduction..................................................................................................................................................1 Specifications...............................................................................................................................................1 Operational Overview..................................................................................................................................1 Update Rate..................................................................................................................................................1 Standard Equipment.....................................................................................................................................2 Additional Parts Required............................................................................................................................2 Optional Software and Equipment...............................................................................................................2 Tachometer Configuration Options.............................................................................................................2 Board Layout and Wiring Connections.......................................................................................................2 Description of Terminals.............................................................................................................................3 0-20mA Output............................................................................................................................................4 0-20mA Output Table..................................................................................................................................5 Hardware Installation options......................................................................................................................6 Accelerometer Sensor Installation...............................................................................................................6 Locating Sensors..........................................................................................................................................7 ii Introduction Thank you for choosing Riotech Instruments’ VTU1X condition monitoring system. The VTU1X condition monitoring system is designed to indicate the condition of reciprocating machines, whether the machine is a compressor or engine. This document is intended to describe the options available when installing your system and to guide you when wiring and configuring the unit. Specifications Supply Voltage: 10-25 VDC Power Requirements: < 150mW Number Inputs: 2 Input Type: Accelerometer Number Outputs: 2 Output Type: • 0-20mA (0-3mA error codes, 4-20mA process variable) • 4-20mA (error codes disabled) Frequency range: 2 - 30 Hz Speed Input: • Pulse: ◦ Frequency: 2 Hz - 30 kHz (using multi pulse-per-rev) ◦ Input Impedance: 50KΩ ◦ Pulse Voltage: low level < 0.25V, high level > 3V (up to 80V) ◦ Duty Cycle: 30% - 70% • Voltage: 0-5V or 1-5V Communications: USB and RS485 (Modbus optional) History Buffer: • One day (86,400) of 1-second average values • One month (43,200) of 1-minute average and maximum values • One 1 year (8,760) of 1-hour average and maximum values Maximum Operating Temperature: 150ºF (65ºC) Operational Overview The VTU1X condition monitoring system is designed to monitor vibrational energy occurring at the running speed, or 1X frequency, of reciprocating equipment. The 1X frequency is a strong indicator of damaging conditions such as looseness, condensate slugs, and other machine anomalies. These conditions are encoded along with other alarm parameters into a 4-20mA output that can be read by an analog input of any controlling device, such as a SCADA or PLC. Update Rate The VTU1X tracks the speed of the monitored equipment (when a tachometer is used) and generates an output based on that speed and the vibrations measured by an accelerometer. It takes a minimum of four rotations to acquire enough data to generate a stable output. Therefore the update rate is ¼ the RPM. How the monitored equipment is configured will determine if an optional tachometer input is required. Users have the option of configuring the unit with a fixed running speed or to use a tachometer input to continuously track the current running speed. If the equipment’s running speed varies by more than ±10% from a configured fixed running speed, then it is necessary that a tachometer be used with the system. A pulse tachometer input can be generated using a proximity switch, optical sensor, or TTL pulse from a PLC. A voltage input (0-5V or 1-5V) is also accepted. 1 Standard Equipment The VTU1X condition monitoring system comes standard with: One explosion proof enclosure with monitoring computer mounted inside Two accelerometers Two 30 ft red Teflon, marine grade cables suitable for use in hazardous locations for connecting the accelerometers to the monitoring computer Speed indication. Unless the system operates within a fairly tight speed range of +/-15%, it will be necessary to input the running speed of the equipment into the VTU1X-102. The VTU1X-102 can read speed by the following methods. • Pulse input: Any device that can output either one pulse or multiple pulses per turn (such as an inductive sensor). • Voltage input: 0-5V or 1-5V which also allows the VTU1X-102 to read from a 4-20mA output with a 250Ω resistor placed across its terminals. Additional Parts Required Pipe fittings and strain relievers: The explosion proof enclosure comes pre-drilled with two ¾" NPT tapped holes. Because of the various implementation options, it cannot be known ahead of time all the parts that would be needed to maintain a NEMA 4X environment. RTI will supply, for an additional charge, a collection of parts that should allow users to implement most configurations. Optional Software and Equipment Configuration and historical trends software, laptop and USB cable: If installation information is supplied, Riotech Instruments will pre-configure and test units before leaving our facility. If users wish to configure the unit themselves, they will need to purchase the optional configuration software kit that comes with software and USB cable for connecting the VTU1X-102 to a computer or laptop. Historical trends may also be downloaded from the VTU1X-102 and viewed on the PC with the purchase of an optional software module. Tachometer Configuration Options The VTU1X-102 speed monitoring system can be configured using optional software as: Preset fixed running speed where no tachometer sensor is needed. Pulse tachometer input: • Single pulse-per-rev: Tachometer pulse supplied by either a sensor or controller with TTL level output. • Multi pulse-per-rev (PPR): PPR range = 1 - 300 (Configure PPR when using an inductive sensor on a flywheel). Voltage tachometer input: • 0-5V • 1-5V (when using a 4-20 mA output tachometer with a 250Ω resistor placed across its terminals) • Corresponding speed range is 0-2000 RPM. Settings may be changed in the field or after installation, as long as power is supplied to the board. Settings are changed using Riotech Instruments’ optional VTU1X configuration software with a PC and supplied USB cable. Most commercially available tachometer sensors will work or can be purchased from Riotech. Board Layout and Wiring Connections When opened, the user will see the electronics used to operate the system. The USB connection on the top side of the board allows the user to configure the unit and/or download history when the unit is powered. Two sets of jumpers (also on the top side) control the tachometer input type and the power source for the 4-20 mA current loop. All other connections are on the bottom side of the board. 2 Jumpers & USB (top side) Terminals (bottom side) Description of Terminals Power supply: • PWR: Power supply positive voltage (12-24 VDC). • GND: Power supply ground. B- / A+: RS-485 connection. Tachometer: accepts a pulse, voltage, or current input. Jumper JP1 must be set to the correct position (PT for pulse, VT for voltage). When set to VT, the input accepts a voltage from 0-5V, so if a sensor with a 420 mA current output is used, a 250Ω resistor may be placed across its terminals to produce a 1-5V voltage output. When set to PT, the input accepts a pulse. The input can accept a powered 2- or 3-wire sensor, or an inductive pickup. (Only sensors supplied by Riotech Instruments are certified to work.) • PWR: Power Out for tachometer, optional (Same as 12-24V Power Positive) • SGNL: Tachometer signal in. • GND: Tachometer ground. • CC_BP: Constant current bypass jumper. The board is equipped with a device which limits the current (15mA) to 3-wire powered sensors. Useful when using a powered sensor in hazardous locations. (Check with compliance officer before using). Default setting is jumpered (bypassed). • CC-PD: Constant current powered device jumper. Allows a constant leakage current to flow through 2-wire tachometers for power. Default setting is open. Accelerometer Inputs: • ‒: Negative accelerometer input (black wire). • +: Positive accelerometer input (red wire). NOTE: All shields should be connected to chassis/earth ground. 4-20 Outputs: the two 4-20 mA current loop circuits may be powered by the VTU1X-102's power supply or by an external power source. Jumpers JP2 & JP3 control the source. • Board-powered (jumpers across the top and bottom pairs of pins of JP2 & JP3): ◦ IN: Current return from current sensor (common to ground). ◦ OUT: 4-20 mA output signal to current sensor input. • Externally-powered (jumpers across the middle pair of pins of JP2 & JP3): ◦ IN: Positive supply voltage from external power supply (7-44 VDC). ◦ OUT: 4-20 mA output signal to current sensor input. NOTES: ◦ External supply ground and current sensor ground must be common to VTU1X-102's supply ground. ◦ For 0-5 volt inputs, place 250Ω resistor across PLC input terminals. 3 0-20mA Output The VTU1X 102 outputs a 0-20mA current level that indicates both system and equipment condition. < 4mA indicates different fault conditions of the system. (See table below) 4-20mA indicates the synchronous vibration energy of the monitored machine. < 4mA indicates different fault conditions of the system. (See table below) 4-20mA indicates the synchronous vibration energy of the monitored machine. 0-20mA wiring options: The 4-20mA range of the 0-20mA output indicates the amount of motion occurring within a narrow frequency band centered about the 1 times running speed of the equipment. This narrow range of energy indicates both looseness as well as knocking caused by extreme looseness or condensate slugs. Operators and analysts become familiar with specific units of measure when evaluating the condition of reciprocating equipment. A common unit of measure of “looseness” or motion is mils. 4-20mA output options: The 4-20mA range of the 0-20mA output indicates the amount of motion occurring within a narrow frequency band centered about the 1 times running speed of the equipment. This narrow range of energy indicates both looseness as well as knocking caused by extreme looseness or condensate slugs. Operators and analysts become familiar with specific units of measure when evaluating the condition of reciprocating equipment. A common unit of measure of “looseness” or motion is mils. 4-20mA output units of measure selection: Displacement (mils p-p) Velocity (in/s pk) Acceleration (Gs pk) Raw signal voltage (mV pk) Choosing 4-20mA output units: If the VTU1X-102 is to be used in a fixed speed application, there is little difference in the choice for correlating output amount to units. A 10% change in vibrational energy will correspond to a 10% change in units change in whatever units are selected. If the VTU1X-102 is to be used in a variable speed application, then it is the user’s choice as to which units would allow the easiest evaluation of the machine’s condition across its operating range of speeds. 4-20mA output value stability: Because of the amplifying effect of the mathematical calculations on the inherent system noise when converting to other units , output value stability is greatest when the output amount is correlated to “Gs”. Choosing output units other than “Gs” could affect the number of false positives for alarms, depending upon the tolerance or headroom given to alarm levels from normal operating conditions. 4 0-20mA Output Table The following is the lookup table for the different output units and their ranges. Output (mA) 1.0 1.5 2.0 2.5 3.0 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 mV pk Gs pk in/s pk mil p-p Machine powered off Tach too high (N/A if tach input is disabled) Bias fault (<1V - sensor shorted) Bad bias voltage (<9V or >14V) Bias fault (>19V - sensor disconnected) 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 0.000 0.125 0.250 0.375 0.500 0.625 0.750 0.875 1.000 1.125 1.250 1.375 1.500 1.625 1.750 1.875 2.000 0.00 1.25 2.50 3.75 5.00 6.25 7.50 8.75 10.00 11.25 12.50 13.75 15.00 16.25 17.50 18.75 20.00 4-20mA Error Codes: Output levels below 4 mA indicate an error condition as noted above. The error codes may be disabled using the optional configuration software, giving a true 4-20mA output. 5 Hardware Installation options In most instances the VTU1X system will be in a hazardous location. Because of this, Riotech Instruments supplies an explosion proof enclosure with two ¾" NPT holes. If a hole is not needed for access, then an appropriate plug should be used to seal the hole. The drawing below shows various examples of installing a VTU1X with or without a tachometer: To Optional Tacho Sensor 2 or 3 Conductor Accel 1 2 conductor Options RioTech Instruments Ltd LLP Class I Div 2 certified strain relief fittings Class I Div 2 certified strain relief fittings VTU1X Power/Gnd Output 1&2 5 Conductor Accel 2 2 conductor Accelerometer Sensor Installation Some VTU1X-102 systems come with two Temperature Isolation Devices (TID) to protect sensors from excess compressor heat. If your system has these included then see the diagram and warning below. COMPRESSOR SURFACE ACCEL THREAD LOCK TID ALL TID CONNECTIONS, HAND TIGHT. IF USING TOOL TO CONNECT CABLE USE BACKUP ON ACCEL THREAD LOCK Note: Threads are ¼-28 and ~3/16 inch in length. Milling not required. WARNING: Weight from the cable that attaches to the accelerometer should be kept under 1 lb. Install cable supports to minimize weight from hanging cables. 6 Locating Sensors Generally, when mounting sensors, while not critical, it is better when mounting: On the compressor frame, mount it high and toward the free end. On a internal combustion driver, mount it near the middle and as inline as possible with the crankshaft. When driven by an electric drive, mount on the compressor near the dive end and as high as possible. Drive end VTU1X sensor should go here. Locate the sensor here on this style of frame. If monitoring each cylinder, locate the sensor near the top of the cylinder on Ariel compressor frames and the bottom of the cylinders on Superior frames. No frame sensor is needed when monitoring each cylinder. RioTech Instruments Ltd LLP 27326 Robinson Rd, Suite 225 Conroe, TX 77385 281-292-9051 [email protected] V15 – 2014-10-29 7