Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Audio power wikipedia , lookup
Sound level meter wikipedia , lookup
Power inverter wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Voltage optimisation wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Opto-isolator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power engineering wikipedia , lookup
Life-cycle greenhouse-gas emissions of energy sources wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Power electronics wikipedia , lookup
Mains electricity wikipedia , lookup
Alternating current wikipedia , lookup
Peak programme meter wikipedia , lookup
Freescale Semiconductor, Inc.
Document Number: DRM145
Rev. 0, 03/2014
Design Reference Manual
Three-Phase Power Meter Software Design
Reference Manual
by: Albert Chen and Shawn Shi
1 Overview
The Freescale three-phase power meter
reference design was designed in compliance
with the China state grid corporation Q/GDW
354-2012 (functional specification for smart
electricity meters), Q/GDW 356-2012 (type
specification for smart poly-phase electricity
meters) standard. The reference design aims to
shorten time to market for power meter
customers and partners, and it can be tailored to
a customer’s unique powering system needs.
Contents
1
Overview ...................................................................................................................... 1
1.1
Hardware develop environment ...................................................................... 2
1.2
Software develop environment ....................................................................... 2
1.3
2
Key features ................................................................................................... 2
System architecture ...................................................................................................... 3
2.1
Software architecture...................................................................................... 5
2.2
Core modules ................................................................................................. 5
2.3
3
Source code organization................................................................................ 8
Install the software ..................................................................................................... 10
3.1
Compile and flash in KL36........................................................................... 10
3.2
Compile and flash in KM14 ......................................................................... 10
3.3
4
4.1
Macro USED_INTERNAL_TEMP .............................................................. 12
4.2
Macro KM14_DEBUG_PHASE .................................................................. 13
4.3
Macro PULSE_NUM ................................................................................... 13
4.4
Macro PULSE_WIDTH ............................................................................... 13
4.5
Macro ESD_TEST_KL36 ............................................................................ 13
4.6
Macro ESD_TEST_KM14 ........................................................................... 13
4.7
Macro SPI_SEND_FREQ ............................................................................ 14
4.8
Macro RTC_COMP_ENABLE .................................................................... 14
4.9
Macro RTC_COMP_INTERA ..................................................................... 14
4.10
Macro USED_EXTERNAL_VREF....................................................... 14
4.11
Macro KL36_FEI_MODE ..................................................................... 14
4.12
Macro COMM_PIN_OUTPUT_PULSE................................................ 14
4.13
Macro CAL_CURR and CAL_VOLT .................................................. 15
4.14
Macro I_MAX ...................................................................................... 15
4.15
Macro U_MAX ..................................................................................... 16
5
APIs exported for KM14 ............................................................................................ 17
5.1
Internal flash(NVM) operations .................................................................... 17
5.2
SPI Master interface ..................................................................................... 18
5.3
RTC calibration interface ............................................................................. 19
5.4
6
Meterlib ....................................................................................................... 19
APIs exported for KL36 ............................................................................................. 22
6.1
6.2
7
Run the demo ............................................................................................... 10
Application configurations ......................................................................................... 12
LCM operations ........................................................................................... 22
SPI Slave interface ....................................................................................... 23
Revision history ......................................................................................................... 23
© 2014 Freescale Semiconductor, Inc.
___________________________________________________________________
1.1 Hardware develop environment
•
•
•
•
Debugger tool: P&E multilink
Test device: 3PH calibration instrument (Model No: KP-P2001-C)
Initial Calibration Condition: Three-Phases, 220V/5A, initial angle is 0, pure resistance load.
MCU: KM14 as metering; KL36 as control.
1.2 Software develop environment
•
•
IDE: IAR6.5
OS support: No OS
1.3 Key features
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
2
Voltage Range: 3 x 220V/380V
Current range: 5(60)A
Active Accuracy (-40C ~ 70C): 0.5S
Reactive Accuracy (-40C ~ 70C): 2S
RTC (-40C ~ 70C): 5ppm
Energy of active; reactive; apparent
Power of active; reactive; apparent
RMS of voltage and current
Line frequency measurement (for precision zero-cross detection)
Current transformers sensing circuit implementation
Low-power modes effectively implemented, including the use of the built-in RTC
LCD display, 8x32 segments
LEDs pulse outputs (kWh, kVARh)
Temper detection and records
Phase missing detection
Calibration UI tools
Communication I/F (Isolated IR; Isolated RS232/485)
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
2 System architecture
Figure 1. KM14 architecture
The brushless DC (BLDC) motor is a rotating electric machine where the stator is a classical three-phase
stator similar to an induction motor and the rotor has surface-mounted permanent magnets (see Figure
1). The motor can have more than one pole pair per phase. (The figure shows the motor with two pole
pairs per phase.) The number of pole pairs per phase defines the ratio between the electrical revolution
and the mechanical revolution.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
3
Figure 2. KM36 architecture
4
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
2.1 Software architecture
Sample
Phase
Compensation
Meter Lib
Pulse out
SPI
Pulse out
KL36
RS485/Irda
LCD
Figure 3. System architecture
2.2 Core modules
1. ZCD: Zero Cross Detect
ZCD is used to calculate power line frequency.
It uses a comparator (CMP) detect if voltage reaches a certain threshold.
When CMP interrupt occurs, the trigger timer runs. The timer capture function will record
the frequency.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
5
Figure 4. ZCD module
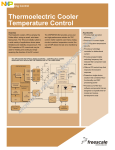
2. Sample
AFE (SD ADC ) is used for sample current.
SAR ADC is used for sample voltage.
Compensation technology ensures that the voltage and current are sampled simultaneously.
Figure 5. Sample module
3. Algorithm lib
According to the sampled data, calculated the active/reactive/total energy, etc.
Note
1. Input sampled value is 24 bits.
Example:
voltage is 16 bits, please convert to 24 bits as in:
u24_sample
= u24_sample << 8;
The current sample value is 24 bits, and its value should not be
changed.
2. The filter coefficient is based on a 1200 Hz sample rate, so data
should be sent to meter lib with 1200 Hz.
If you want to change the sample rate, use “Filter-Based Metering Algorithms Configuration
Tool” to create new set of coefficients.
6
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Figure 6. Configuration tool
Figure 7. Algorithm lib framework
4. RTC compensation lib
RTC output accuracy reaches 5PPM in full temperature zone.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
7
5. SPI between meter and control MCU
KM14 informs KL36 power energy information, and KL36 may respond with useful information
such as the button pressed.
6. Segment LCD show
Show active power and reactive power values.
Figure 8. LCD display
2.3 Source code organization
MS3P4W\projects\:
mk343ph\: KM34 meter IAR build, use the file project.eww to open project.
kl36\: HMI IAR build, use the file iar\platinum\platinum.eww to open project.
MS3P4W\src\:
public.c, public.h: public functions and definitions
comu.h: SPI communication protocol
rtc_comp.c, rtc_ rtc_comp_table.c: RTC compensation process.
common\:
8
system startup code
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
config\:
compile options for flash
cpu\:
system public code
drivers\:
peripheral drivers in KM34
fraclib\:
math lib
freemaster\:
freemaster lib support
meterlib3ph\: core algorithm lib
projects\ km34z128_3ph_meter\: main app
appconfig.h: KM14 configuration
config.c, config.h: save/read calibration data
mk343ph.h: filter coefficient of meter lib
mk343ph_local.c: main function
nvm.c, nvm.h: flash operation
freemaster_cfg.h: freemaster configuration
projects\ local\: peripheral drivers
misc.c: system init function
spi_hal.c: spi interface
test.c,test.h: peripheral test routines.
MS3P4W \src\HMI\KL36\src\: KL36 HMI code
common\:
system startup code
cpu\:
system public code
drivers\:
peripheral drivers in KL36
freemaster\:freemaster lib support
platforms\: platform specified files
projects\platinum\: HMI code
at24cxx .h, at24cxx.c: Microchip I2C 512KB EEPROM driver
kbi.c: button driver.
lcm.c: LCD high level driver.
spi_slave.c: spi slave high level driver
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
9
mag3110.h, mag3110.c:
I2C mag3110 Three-Axis, Digital Magnetometer driver
platinum.c: main loop
rs485_parse.c: RS485 high level driver
3 Install the software
3.1 Compile and flash in KL36
1.
2.
3.
4.
5.
Open MS3P4W\projects\mk343ph\project.eww by IAR.
Click IAR menu project->build.
Connected PE with J27 on board.
Power on board.
Click IAR menu project->Download and Debug.
3.2 Compile and flash in KM14
1.
2.
3.
4.
5.
Open MS3P4W\projects\KL36\iar\platinum\platinum_freedom.ewp.
Click menu project->build.
Connected PE with J32 on board.
Power on board.
Click IAR menu project->Download and Debug.
3.3 Run the demo
1. If this meter is not calibrated:
Use standard calibration instrument and set parameters:
220V/5A, initial angle is 0, pure resistance load.
After power on, wait about 40 seconds until the calibration process is complete.
Power off and power on device after calibration.
10
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Start
System
Init
Sample
Meter Lib
Compute Energy
Update Pulsing
information
N
Computation
Times > 140
Y
Write Correction
Data to Flash
Figure 9. Calibration process
2. If this meter is calibrated then the meter test can be performed.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
11
Start
System
Init
Sample
Phase
Compensation
Meter Lib
Compute Energy
Update Pulsing
information
Figure 10. Meter running
4 Application configurations
Configurations are stored primarily in MS3P4W\src\public.h file.
Macros whose name includes the string “KL36” are used for KL36 MCU.
Others are used for KM14 MCU.
4.1 Macro USED_INTERNAL_TEMP
If defined, the meter uses an internal temperature sensor to calibrate the RTC.
If not defined, the meter uses an external temperature sensor.
Default: not defined.
12
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
4.2 Macro KM14_DEBUG_PHASE
If defined, the line frequency and external temperature sensor cannot be measured.
During the developing phase, define this macro.
PTE6 and PTE7 are multiplexes with a debug pin.
PTE6: used to measure line frequency.
PTE7: used as an external temperature sensor.
Figure 11. Signal multiplexing
Default: not defined.
4.3 Macro PULSE_NUM
Constant pulse number.
Default is 400.
4.4 Macro PULSE_WIDTH
Pulse width. Unit is µs.
Default is 80000 (80ms).
4.5 Macro ESD_TEST_KL36
If defined, set the reset pin on KL36 to GPIO output; update the LCD every 1s indicated the kl36
is alive.
Default: defined.
4.6 Macro ESD_TEST_KM14
If defined, set the reset pin on KM14 to GPIO output; LED “Mfunc” on board toggle every 1s
indicate photon is alive.
Default: defined.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
13
4.7 Macro SPI_SEND_FREQ
SPI communicated frequency.
Default is 2, (communicate 2 times 1 second).
4.8 Macro RTC_COMP_ENABLE
If defined, enable RTC compensation algorithm.
Default: defined.
4.9 Macro RTC_COMP_INTERA
If defined, enable RTC interact calibration, and RS485 port will output the ADC value of temp
sensor.
Default: not defined.
4.10 Macro USED_EXTERNAL_VREF
If defined, the ADC used an external 1.2V reference.
If not defined, the ADC used an internal 1.2V reference.
4.11 Macro KL36_FEI_MODE
If defined, KL36 used an internal OSC as the clock source.
If not defined, KL36 used an external 8 MHz clock source.
Default: not defined.
Note
If an internal OSC (Macro KL36_FEI_MODE defined) is used, the pulse
output from KL36 is not precise because the internal OSC is not precise.
4.12 Macro COMM_PIN_OUTPUT_PULSE
If defined, pta5/pta6 on photon is used as active/reactive energy pulse out signal.
ptc0/ptc1 on kl36 as pulse out pins.
Photon calculated the energy, when need toggle pulse, photon informs KL36 by 2 pins
(pta5/pta6, ptc0/ptc1).
Default: not defined.
14
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Note
If defined KL36_FEI_MODE, should enable this macro because KL36
internal OSC is not precise, enable macro
COMM_PIN_OUTPUT_PULSE, KL36 will product precise pulse signal.
4.13 Macro CAL_CURR and CAL_VOLT
#define CAL_CURR
#define CAL_VOLT
5.0
220.0
The default calibration environment is used 220V, 5.0A.
The preset calibration angle is 0 degree.
4.14 Macro I_MAX
#define I_MAX 110.0
Unit is Ampere.
It used for meter lib.
SD ADC(AFE) is used for sampling current.
When PGA is off, the maximum differential input range is 500mV.
so V+ max (IA_IN+) = 250mv. ( 250mV – (-250mV) = 500mV)
Figure 12. Current sampling
Sample resistance is 4.7 (like R56).
U = I * R, suppose K is CT ratio.
So
Umax = 0.25V = (Imax
* R/ K),
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
15
Imax = 0.25 * K / R
here K = 2000, R = 4.7,
Imax = 0.25 * 2000 / 4.7 = 106
Left some margin, ~ 5%:
106 * (1 + 0.05) = 111A
Used 110A.
4.15 Macro U_MAX
#define U_MAX
800.0
Vin
Unit is volts.
Used for meter lib.
Vadc
Figure 13. Voltage sample
The point Vadc is connected with P_TP3.
Rt = P_R1 + P_R2 + P_R4 + P_R5 + P_R6 + P_R7 = 600K
Then:
Current = ( Vin – Vadc) / Rt = (Vadc – Vref/2) / R57
So:
Vadc = Vref/2 + (Vin * R57 / Rt)
Vadc max is Vref, Vref = 1.2V
So:
Vin(max) = 0.6 * Rt / R57 = 0.6 * 600K / 470 = 766V
16
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Left some margin, ~ 5%:
766V * ( 1 + 0.05) = 804V
Used 800V.
5 APIs exported for KM14
For peripheral access interface, see the content named “photon_refman.chm.”
This manual will only introduce the application level interface.
5.1 Internal flash(NVM) operations
NVM — Nonvolatile memory.
All APIs related to NVM are defined in src\projects\km34z128_3ph_meter\nvm.h.
Note
1. The flash memory can only move bits from the '1' state (erased) to
the '0' state (programmed). Only the erase operation restores bits
from '0' to'1'; bits cannot be programmed from a '0' to a '1'.
2. Sector size of 1 KB. The smallest portion of the program flash
memory is 1KB.
3. When performing the erase operation, the start address is 1KB
aligned.
Figure 14. KM14 System Memory Map
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
17
We set the location of the meter parameters to 0x0001f000.
#pragma location = 0x0001f000
const tCONFIG_FLASH_DATA3PH
nvmcfg3Ph;/* this variable is stored in flash */
1. NVM_MemRead
int NVM_MemRead (void *pSrc, void *pDst, int size)
Read array from NVM memory.
2. NVM_MemSave
int NVM_MemSave (void *pDst, void *pSrc, int size)
Write array into NVM memory.
3. NVM_SectorErase
void NVM_SectorErase (void *pDst)
Erase sector in NVM memory.
4. NVM_W32Read
int NVM_W32Read (unsigned long *pSrc, unsigned long *pVal)
Read long word from NVM memory.
5. NVM_W32Write
int NVM_W32Write (unsigned long *pDst, unsigned long val)
Write long word into NVM memory.
5.2 SPI Master interface
SPI module is used to communicate between KM14 and KL36.
KM14 acts as SPI master.
1. spi_poll_send
void spi_poll_send(uint16* buf, uint16 len)
Send bufffer content to KL36.
2. spi_poll_recv
18
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
void spi_poll_recv(uint16* buf, uint16 len)
Receive something from KL36.
5.3 RTC calibration interface
1. cal_ppm
int32 cal_ppm(double diff)
Translate seconds difference within one day to PPM.
[in] diff: 1 day delta seconds, read from a meter calibration device.
Return: PPM value
2. cal_rtc
int8 cal_rtc(int32 ppm, uint8 *pfrac)
Translate PPM value to register setting values.
[in] ppm: ppm value
[out] pfrac: frac value
Return : int_part value.
Call IRTC_UpdateFineCompVal(int_part, frac)
To calibrate the RTC.
3. cal_rtc_ext
int8 cal_rtc_ext(double diff, uint8 *pfrac)
Same as cal_rtc except input value is one day delta seconds.
4. get_temp
int8 get_temp(uint16 adc_temp)
Calculate the temperature according to sampled ADC values.
5.4 Meterlib
Requirements:
A. Sampled values are 24-bit data format.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
19
If sampled values are not 24-bit data format, convert them to 24-bit.
For example, the sampled value for voltage is 16-bit as in: uint16 adc_voltage;
define a new variable as in: Frac32 u24_samplePh2, and
convert it to 24-bit as in: u24_samplePh2 = (Frac32)temp16 << 8.
Lastly, the variable u24_samplePh2 can be used to meter lib.
B. Filter coefficient is based on 1200Hz.
The function call frequency for auxcalc_callback is 1200 Hz.
To change to another frequency, recreate the filter coefficient table.
5.4.1 Interfaces for meterlib
1. KWH_PULS_NUM(x): represents 50% energy of one active pulse
#define KWH_PULS_NUM(x)
FRAC48(((5e2/(x))/(U_MAX*I_MAX/3600/CALCFREQ)))
X: constant pulse number. Default is 400.
2. KVARH_PULS_NUM(x): represent the 50% energy of one reactive pulse
#define KVARH_PULS_NUM(x) FRAC48(((5e2/(x))/(U_MAX*I_MAX/3600/CALCFREQ)))
Similar to KWH_PULS_NUM(x).
3. do_filter: Calculate the energy.
The frequency of this function call is 1200 Hz.
void do_filter(tMETERLIB3PH_DATA *p,
Frac24 u1Q, Frac24 i1Q,
Frac24 u2Q, Frac24 i2Q,
Frac24 u3Q, Frac24 i3Q,
Frac32 *whCnt, Frac32 *varCnt,
Frac64 whRes, Frac64 varRes);
Input:
tMETERLIB3PH_DATA *p: includes the filter coefficient.
u1Q, i1Q, …: the calibrated sample result.
whRes, varRes: pulse resolution
Input, Output:
whCnt, varCnt: output pulse number. They would be changed if energy reaches the threshold.
20
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Example:
do_filter(mlib,
-L_mul (u1 – u1_offset, u1_gain),
-L_mul (i1 – i1_offset, i1_gain),
-L_mul (u2 – u2_offset, u2_gain),
-L_mul (i2 – i2_offset, i2_gain),
-L_mul (u3 – u3_offset, u3_gain),
-L_mul (i3 – i3_offset, i3_gain),
&wh_cnt, &varh_cnt,
KWH_PULS_NUM(400), KVARH_PULS_NUM(400));
void do_filter(tMETERLIB3PH_DATA *p,
Frac24 u1Q, Frac24 i1Q,
Frac24 u2Q, Frac24 i2Q,
Frac24 u3Q, Frac24 i3Q,
Frac32 *whCnt, Frac32 *varCnt,
Frac64 whRes, Frac64 varRes)
{
METERLIB3PH_RemoveDcBias(p, u1Q, i1Q, u2Q, i2Q, u3Q, i3Q);
METERLIB3PH_CalcWattHours(p, whCnt, whRes);
METERLIB3PH_CalcVarHours( p, varCnt, varRes);
METERLIB3PH_CalcAuxiliary(p);
}
5.4.2 When to produce the pulse
After call do_filter, the mlib.Wh.pulsOut and mlib.VARh.pulsOut would be changed if energy
reaches the threshold.
Save the last value (last_pulseOut) of pulsOut and use the following algorithm:
if (last_pulseOut!= mlib.Wh.pulsOut) {
if (mlib.Wh.pulsOut) {
product a pulse; //time to product a pulse
}
Last_pulseOut = mlib.Wh.pulsOut;
}
Use another timer to count the pulse duty.
4. METERLIB3PH_ReadResultsPhx
Return auxiliary variables: IRMS, URMS, P, Q and S.
It is OK to call this function anytime.
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
21
6 APIs exported for KL36
Figure 15. LCD example
6.1 LCM operations
LCD Control Module (LCM).
This solution uses ht16c23 controller with I2C interface.
1. #define I2C_LCM_ADDR 0x3e /* 7 bit I2C slave address */
7 bit LCM I2C slave addresses.
2. lcm_i2c0_cmd
void lcm_i2c0_cmd(uint8 reg, uint8 val)
Write LCM register.
3. lcm_i2c0_write
void lcm_i2c0_write(uint8* data, uint8 len)
22
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
Write data to the LCM buffer.
4. lcm_i2c0_write_mem
void lcm_i2c0_write_mem(uint8 reg, uint8 val)
Write value into specified LCM memory.
5. lcm_i2c0_read_mem
uint8 lcm_i2c0_write_mem(uint8 reg)
Read value from specified LCM memory.
6. lcmd_show_icon
void lcmd_show_icon(enum segment_name icon, uint8 show)
Show/hide icon.
7. lcm_show_num
void lcm_show_num(uint8 num, uint8 pos)
Show num from 1-based pos.
One example:
See figure 7-1, there are 19 number locations.
If you want to show number 23 from position 2, you could call:
lcm_show_num(23, 2);
6.2 SPI Slave interface
1. get_command: get command from master.
uint8 get_command(void)
2. SPI0_ReadW: read one 16bit content from master.
3. SPI0_writeW: write one 16bit content to master.
7 Revision history
Table 1. Revision history
Revision number
Date
Substantial changes
0
03/2014
Initial release
Three-Phase Power Meter Software Design Reference Manual, Rev. 0, 03/2014
Freescale Semiconductor, Inc.
23
How to Reach Us:
Home Page:
freescale.com
Web Support:
freescale.com/support
Information in this document is provided solely to enable system and software
implementers to use Freescale products. There are no express or implied copyright
licenses granted hereunder to design or fabricate any integrated circuits based on the
information in this document.
Freescale reserves the right to make changes without further notice to any products
herein. Freescale makes no warranty, representation, or guarantee regarding the
suitability of its products for any particular purpose, nor does Freescale assume any
liability arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or incidental
damages. “Typical” parameters that may be provided in Freescale data sheets and/or
specifications can and do vary in different applications, and actual performance may vary
over time. All operating parameters, including “typicals,” must be validated for each
customer application by customer’s technical experts. Freescale does not convey any
license under its patent rights nor the rights of others. Freescale sells products pursuant
to standard terms and conditions of sale, which can be found at the following address:
freescale.com/SalesTermsandConditions.
Freescale, the Freescale logo, and Kinetis are trademarks of Freescale Semiconductor,
Inc., Reg. U.S. Pat. & Tm. Off. All other product or service names are the property of their
respective owners. ARM and Cortex are registered trademarks of ARM Limited (or its
subsidiaries) in the EU and/or elsewhere. All rights reserved.
© 2014 Freescale Semiconductor, Inc.
Document Number: DRM145
Rev. 0
03/2014