Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
Electrification wikipedia , lookup
Audio power wikipedia , lookup
History of electric power transmission wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Power engineering wikipedia , lookup
Power over Ethernet wikipedia , lookup
Buck converter wikipedia , lookup
Distribution management system wikipedia , lookup
Power electronics wikipedia , lookup
Alternating current wikipedia , lookup
Voltage optimisation wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Rectiverter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Mains electricity wikipedia , lookup
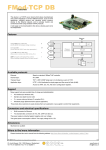
CubeComputer General Purpose Onboard Computer Datasheet Electronics Systems Laboratory Engineering Faculty University of Stellenbosch Private Bag X1 Matieland 7602 South Africa Contact Us: Phone: +27-21-808-4926 Fax: +27-21-808-4981 Email: [email protected] URL: http//www.esl.sun.ac.za Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 2 Table of Content 1. System Summary ............................................................................................................................................... 3 2. Functional Description ...................................................................................................................................... 4 3. Electrical Characteristics ................................................................................................................................... 6 4. Waveforms........................................................................................................................................................... 7 5. Connector Details ............................................................................................................................................10 6. Physical Specification ......................................................................................................................................13 7. Environmental Tests ........................................................................................................................................14 8. Revision Record ................................................................................................................................................16 List of Acronyms/Abbreviations ADC ADCS C&DH EDAC EEPROM ESL FPGA Analog to Digital Converter Attitude and Determination Control System Command and Data Handling Error Detection and Correction Electronic Erasable Programmable Read Only Memory Electronic Systems Laboratory Field Programmable Gate Array ISIS MCU OBC PBH RTC SEL SEU SPI SRAM TT&C UART Inter- Integrated Circuit Innovative Solutions in Space Microcontroller Unit Onboard Computer Piggyback Header Real-time Clock Single Event Latchup Single Event Upset Serial Peripheral Interface Static Random Access Memory Telemetry, Tracking & Command Universal Asynchronous Receiver/Transmitter I 2C Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 3 1. System Summary Application General purpose, high performance, low power, robust nanosatellite onboard computer Suitable for ADCS , C&DH, TT&C, mass storage and payload management Compatibility Conforms to CubeSat standard Compatible with Pumpkin, ISIS, ClydeSpace & Gomspace products Compatible with other Cube products from the ESL (CubeSense & CubeControl) Heritage Design based on knowledge and technology from SunSat and SumbandillaSat To be used as ADCS OBC on multiple CubeSat missions Features Microcontroller High performance, low power 32-bit ARM Cortex-M3 based MCU 4-48MHz @ 1.25-1.52 DMIPS/MHz Internal + External Watchdog for added reliability Memory & Storage 32 KB of EEPROM 4 MB of Flash for Code Storage 2 x 1 MB of external SRAM for Data Storage o Single Event Upset protection by means of an FPGA based flow-through EDAC o Single Event Latchup protection by detecting and isolating latchup currents MicroSD socket for storage up to 2GB Communication 2 x I2C interface with multi-master capabilities 1 x CAN interface capable of standard and extended data and remote frames. Customization Piggyback header (PBH) allows for mission specific expansion boards PBH includes I2C, UART, SPI, 4 x ADC, 4 x PWM and GPIO interfaces PBH can be powered from 3.3V, 5V and battery bus voltage levels Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 4 2. Functional Description System Overview The CubeComputer is a general purpose onboard computer intended for use on nanosatellites. It was designed from the ground up to be fully compatible with the CubeSat standard as well as other CubeSat subsystem from ISIS, Pumpkin, ClydeSpace, Gomspace and other ESL products. The OBC is built around an ARM Cortex-M3 based MCU which delivers high performance at very low power. To protect the OBC against radiation effects such as SEUs and SELs, fault tolerance 256KB EEPROM (Code) 4MB Flash (Code) MicroSD (Storage) Debug SPI UART EBI CAN MCU Cortex-M3 2 x I2C 2 x 1MB SRAM (Data) UART SPI 4 x ADC 3 x PWM FPGA (EDAC) Main Header (104-pin) techniques have been implemented for increased reliability. Piggyback Header Figure 1 – CubeComputer Block Diagram Microcontroller The CubeComputer uses a MCU which is based on the next generation 32-bit ARM Cortex-M3 architecture and operates at 4-48 MHz delivering 1.25 DMIPS/MHz. The MCU is also optimized towards efficiency and therefore has a very small power consumption footprint of 200uA/MHz when executing from FLASH and 0.9uA when in deep sleep mode. The MCU also includes all the needed on-chip peripherals for a nanosatellite onboard computer: RTC, Timers, ADC, External Memory Interface, UART, SPI, and I2C. To safeguard the MCU against software and hardware lock-ups an internal and external watchdog is implemented. In the event that the lock-up is caused by a radiation induced latchup within the MCU, a normal reset will not recover the MCU. Therefore the external watchdog power cycles the OBC in order to remove the latchup. Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 5 Memory The CubeComputer has an extensive memory subsystem which includes EEPROM, FLASH, SRAM and optional microSD card storage. 32 KB of external EEPROM is used to store critical code applications, such as a safe mode operating program, due to its resistance against radiation effects or accidental software writes. 4 MB of external FLASH is available for additional code storage. 2 × 1 MB of SRAM is included for data storage by the operating application. A microSD card slot is optionally available which allow for up to 2GB of general purpose storage. Since SRAM is especially vulnerable against the effects of radiation, such as SEU and SEL, it is implemented externally (from the MCU) in order to effectively mitigate these single event effects. A flow through EDAC is implemented on the external bus interface, between SRAM and MCU, to detect up to six and correct up to 2 bit-flips per byte. The SRAM supply current is constantly monitored in order to quickly detect a single event latchup and correct it by power cycling the component. If it cannot be recovered, the SRAM is isolated from the bus. The redundant SRAM configuration ensures that no data is lost when one of the SRAM modules is power cycled or isolated. Communication The CubeComputer provides all the needed interfaces in order to communicate with other subsystems in the satellite. The OBC provides two I2C channels, where one is used to interface with the main I2C bus on the CubeSat, either as a slave or master, and another can be used to communicate with a separate slave device(s) and/or subsystems. A CAN bus is also available for high speed and high reliability communication on the main CubeSat header. Customization The CubeComputer includes a separate piggyback header which can be used to interface directly with a mission specific expansion boards. Various interfaces (I2C, UART, and SPI) and functionality (PWM, ADC, and GPIO) have been routed to the piggyback header which can be accessed directly by the MCU. The piggyback header also has access to the full range of power supply voltages: raw battery bus voltage, 5V and 3.3V supply. Examples of typical expansion board applications include an attitude and control subsystem and/or payload interface. Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 6 3. Electrical Characteristics Table 1 - CubeComputer Electrical Characteristics Symbol VCC VR f TA IO* VI2C RI2C VUART Parameter Supply voltage Reset Threshold Clock Frequency Operating Temperature MCU† Fibonacci while(1) Stop Mode Sleep Mode Peripheral‡ UART CAN ADC EEPROM Flash SRAM microSD I2C voltage levels I2C bitrate UART voltage levels * @ VCC = 3.3V, TA = 25°C † @ 48 MHz External crystal oscillator & 14 MHz internal RC oscillator ‡ Current consumption on top of stop mode current while being used Min 3.0 Nom 3.3 2.93 4 -10 Max 3.6 48 70 Unit V V MHz °C mA 39 / 23 35 / 22 24 / 19 23 / 19 0 +6 +7 +4 +9 +17 +8 +8 3.3 / 5 400 3.3 +25 +15 +25 +27 +60 1000 V kps V Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 7 4. Waveforms Error Detection and Correction Figure 2 - Figure 5 shows simulated waveforms for the flow through EDAC implemented in the FPGA. The EDAC has the capabilities to detect and correct up to two errors per byte. Three error bit signals are output by the FPGA, if and when an error has been detected, which will generate an interrupt to the MCU. The value of these signals can be interpreted as follows: Table 2- Error Signal Description Errors[0:2] 000 100 010 001 Description No errors Single error Double error Multiple errors Figure 2 - EDAC Encoding and Decoding with No-Errors Figure 3 – EDAC Encoding and Decoding with One Error Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 8 Figure 4 – EDAC Encoding and Decoding with Two Errors Figure 5 – EDAC Encoding and Decoding with Multiple Errors SRAM Latchup Response Figure 6 – Figure 8 shows measured latchup response waveforms of the supply current for the CubeComputer SRAM modules. During normal operation the latchup can be detected and the module disabled within 20µs. In most cases a power cycle should be enough to remove the latch. In order to avoid false positive latchup detection due to inrush currents (Figure 7), a blanking period of 2ms is given before latchup detection is enabled. Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 9 Figure 6 - SRAM Latchup Response during Operation Figure 7 - SRAM In-Rush Current when Enabled Figure 8 - SRAM Latchup Response when Enabled Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 10 5. Connector Details Figure 9 shows the top view of the CubeComputer preliminary PCB layout, with the connectors indicated by the designator “P”. The description and pin out (where necessary) for all connectors are described as follows: Figure 9 - Top View of CubeComputer PCB Layout P100 – connector used for programming the microcontroller (JTAG) P101 – connector used for debug UART output. Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 11 Table 3 – Pin out for Header P101 Pin Signal Description 1 TX Debug UART TX 2 RX Debug UART RX 3 GND Shared ground connection P200 – connector used for programming FPGA P300 – microSD card slot P500 – jumper connection to enable/disable the external watchdog timer P600 – piggyback header used for expansion board Table 4 – Pin out for header P600 PBH Pin MCU Pin Signal Description 1,2 - V_Bat Battery supply from main header 3,4 - 5V_MH 5V supply from main header 5,6 - 3V3_MH 3.3V supply from main header 7 PF7 UART_RX Miscellaneous UART RX 9 PF6 UART_TX Miscellaneous UART TX 8 PC5 I2C_SCL Subsystem I2C clock signal 10 PC4 I2C_SDA Subsystem I2C data signal 11 PE5 SPI_CLK Miscellaneous SPI clock signal 13 PE4 SPI_CS Miscellaneous SPI chip select 15 PE7 SPI_MOSI Miscellaneous SPI master out/slave in 17 PE6 SPI_MISO Miscellaneous SPI master in/slave out 12,14, 16,19 PA8-10, PB11 PWM PWM output signals 18,20, 21,22, 24 PA11-13, PB12, PE0 GPIO General purpose input/output 23 PD8 BU_VIN This pin is used to power the backup power domain. The backup power domain is used by the Backup Real Time Clock. 25-28 PD4-PD7 ADC 12-bit ADC. Connected to the MCU through a voltage follow op-amp circuit. These pins cannot be used as GPIO pins 29,30 - GND *Pins 7 to 22 and 24 can all be configured as GPIOs Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 12 P601, 602 – jumper connection to select main and subsystem I2C bus voltage levels Pin Signal Description 1-2 5V 5V I2C bus voltage level 2-3 3.3V I2C bus voltage level 3V3 H1, 2 – main CubeSatKit header (SAMTEC ESQ-126-49-G-D) used throughout CubeSat subsystems H2 H1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 Table 5 – Pin out for header H1 Pin Signal 1 CANL 3 CANH 21 SUB_I2C_SCL 23 SUB_I2C_SDA 41 SYS_I2C_SDA 43 SYS_I2C_SCL 47,49,51 5V_SW 48,50,52 3V3_SW Description CAN bus low CAN bus high Subsystem I2C clock line Subsystem I2C data line Main CubeSat I2C data line Main CubeSat I2C clock line Switchable 5V supply delivered by external power system Switchable 3V3 supply delivered by external power system Table 6 – Pin out for header H2 Pin 25,26 27,28 29,30,32 45,46 Signal 5V 3V3 GND V_BAT Description Regulated 5V supply delivered by external power Regulated 3V3 supply delivered by external power Unregulated battery supply delivered by external power system Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 13 6. Physical Specification The CubeComputer PCB is designed to fit in the standard CubeSat structure. Figure 10 shows the dimensions of the PCB, with measurements in mm. Mass – 65.84g PCB material – FR4 Figure 10 - Dimensions of CubeComputer PCB Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 14 7. Environmental Tests Vibration Test Description A vibration test subjects a subsystem to vibrational loads of various frequencies and amplitudes. This test is required in order to verify that the subsystem will still perform as intended after experiencing the intense vibrations which occur during launch. Because the orientation of the satellite in the launch vehicle is not known beforehand, the maximum loads should be tested in all three major axes. Table 7 and Table 8 shows the specified vibration loads the CubeComputer were subjected to for qualification tests. Table 7 - Sine Vibration Specifications Characteristic Test Directions Profile Frequency range [Hz] 5-10 10-15 15-20 Sweep Rate Qualification Required X,Y,Z Amplitude[g] 0.5 1.0 0.5 2 [oct/min] Acceptance Required X,Y,Z Amplitude [g] 0.4 0.8 0.4 4 [oct/min] Qualification Required X,Y,Z Amplitude[g2/Hz] 0.007 0.007 0.007 – 0.022 0.022 – 0.035 0.035 0.035 – 0.017 0.017 – 0.005 6.5 [g] 35 [sec/axis] Acceptance Required X,Y,Z Amplitude [g2/Hz] 0.004 0.004 0.004 – 0.014 0.014 – 0.022 0.022 0.022 – 0.011 0.011 – 0.00 5.2 [g] 35 [sec/axis] Table 8 - Random vibration specifications Characteristic Test Directions Profile Frequency range [Hz] 20 – 40 40 – 80 80 – 160 160 – 320 320 – 640 640 – 1280 1280 – 2000 RMS acceleration Duration For vibration testing, the following risk factors have been identified: CubeComputer microSD card connector CubeComputer components solder joints Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 15 Results Post vibration test results showed no damage to the areas that were considered risk factors and no measurable difference were noted to normal operating behavior after the vibration tests. Heated Vacuum Test Description A vacuum chamber was used to test the operation of the module in a low pressure environment similar to that found in space, which is in the order of 10-5 mbar. This low pressure can have a variety of adverse effects on the module: Outgassing of components Bubbles in soldering can cause a solder connection to crack and explode Heat dissipation through convection becomes negligible and hot spots can occur The vacuum chamber was de-pressured to 3.5 x 10-3 mbar and the module heated to 60 °C in order to verify the lack of any thermal hotspots. Results No measureable differences were detected in operating conditions during and after vacuum cycle. The temperature of the board and components also settled close to ambient verify adequate heat dissipation via conduction. Part: CubeComputer Doc: Datasheet Ver: 1.0 Page: 16 8. Revision Record Revision A B C D E F Date 05/06/2013 20/06/2013 19/07/2013 23/07/2013 21/08/2013 18/10/2013 Author(s) PJB JE/PJB PJB PJB PJB PJB Pages ALL ALL 14 8,9 6 4,11 G 20/12/2013 PJB 3,5 H 25/01/2014 CJG 11 Description of Change First Draft Language and formatting Added heated vacuum test results Added latchup response waveforms Updated power consumption table Updatead OBC block diagram Updated piggyback header pin-out description Updated datasheet to correctly reflect size of EEPROM. Updated the piggyback pin out. Pin 23 BU_VIN used to supply power to the real time clock.