Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Retroreflector wikipedia , lookup
Anti-reflective coating wikipedia , lookup
Fourier optics wikipedia , lookup
Chemical imaging wikipedia , lookup
Preclinical imaging wikipedia , lookup
Image stabilization wikipedia , lookup
Lens (optics) wikipedia , lookup
Ray tracing (graphics) wikipedia , lookup
Schneider Kreuznach wikipedia , lookup
Nonimaging optics wikipedia , lookup
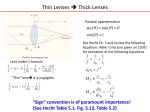
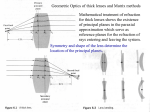
•Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Sign convention Bookkeeping for cascaded systems • • • • Light travels left to right Distances to the right are + Heights above the axis are + The radius of a surface is + if its center of curvature is to the right • Focal lengths of converging elements are + • Light traveling in a – direction (after a mirror) uses distances and indices that are negative Robert McLeod O’Shea 1.4, Mouroulis and Macdonald 3.1 32 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Sign convention Graphically t -t h -h R Robert McLeod -R 33 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Examples of sign convention Transmitting surface (lens) -R -u´ u R´ Reflecting surface (mirror) t n -n´ h -h´ -u´ -R -t´ Robert McLeod 34 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design What’s a lens? Paraxial approximation Let us assume, for a moment, that a lens is a thin phase function that connects all of the rays from an object to an image. r -t t’ object n image n’ lens nt nt n t 2 r 2 n t 2 r 2 Slens r Fermat’s principle r 2 n r2 n nt nt Slens r Binomial (paraxial) 2 t 2 t approximation r 2 n n r2 Slens r 2 t t 2f OPL of a paraxial thin lens n n 1 f t t Gaussian thin lens equation f Focal length of lens =1/f Power of lens Robert McLeod Note that Mouroulis uses K for power [m] [diopters] 35 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Power of a lens Physical meaning -t t’ 1 1 t t In air The power of a lens is the algebraic increment in curvature added to the incident wavefront. Note that this means that two thin lenses in contact are equivalent to a single lens with the sum of the powers. Robert McLeod P. Mouroulis & J. Macdonald, 3.5.2 36 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Jargon: “conjugates” Conjugates or conjugate planes: Two planes are conjugate if an object at one forms an image at the other. Finite conjugate. Both of said planes are at finite distances from the optical system. Infinite conjugate: One of the conjugate planes is at infinity, that is the rays are parallel. Afocal: An object at -∞ is conjugate to an image at + ∞. The focal length is ∞. Robert McLeod 37 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Graphical ray tracing Solving Maxwell’s Eq. with a ruler Object M y -t y t 0 y t t’ y Image 1. A ray through the center of the lens is undeviated 2. An incident ray parallel to the optic axis goes through the back focal point 3. An incident ray through the front focal point emerges parallel to the optic axis. and occasionally useful 4. Two rays that are parallel in front of the lens intersect at the back focal plane. 5. Corollary: two rays that intersect at the front focal plane emerge parallel. Object -t t’ Image Robert McLeod 38 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Graphical tracing Negative lenses -t y y´ -t´ y t M 0 y t Virtual image -f 1. A ray through the center of the lens is undeviated 2. An incident ray parallel to the optic axis appears to emerge from the front focal point 3. An incident ray directed towards the back focal point emerges parallel to the optic axis. and occasionally useful 4. Two rays that are parallel in front of the lens intersect at the back focal plane. 5. Corollary: two rays that intersect at the front focal plane emerge parallel. Robert McLeod 39 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Real and virtual Images and objects project rays back to intersection Real object Virtual image -t -t’ Virtual object Real Image t’ t If you can’t see the light by placing a screen at the plane where it is in focus, then it is virtual. Equivalently, an image is virtual if you need another lens (e.g. an eye) to make the image real. Equivalently, real (virtual) objects are to the left (right) of the surface and real (virtual) images are to the right (left). Robert McLeod 40 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Tracing mirrors Mirror system Equivalent lens system t t t t t t t t t t t t t t Robert McLeod t t 41 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Thin lens equations + derived forms and quantities z z t t y f y t M y t 0 Via similar triangles… transverse magnification dt dt 2 2 t t 2 dt t Ml 2 M2 dt t z y fy f M z y yf f M z z f Robert McLeod 2 f -y’ Take derivative of thin lens equation Longitudinal magnification Via similar triangles… Newton’s lens equation (applies to thick lenses as well) 42 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Angular magnification t t u y u -y’ y t M y t From previous slide Angular magnification is ratio of two axial rays (rays that cross the axis at the object and image): u h / t t 1 M u h / t t M h is ray height at lens. Remember the radiometric unit L = radiance ( or photometric “brightness”) in units of [W/(sr m2)]? We just found that as size of an object goes up, it’s angular extent decreases by the same amount. Brightness is conserved. Robert McLeod 43 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Scheimpflug condition Imaging from a tilted plane Ray parallel to AB must intersect at back focal plane B A A B Paraxial (first-order) optical systems image lines to lines and planes to planes, even when the objects are not normal to the optical axis. Proof: Draw ray ABAB using a ray parallel to AB through the front focal plane. Then draw rays AA and BB Robert McLeod 44 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Throw Assume you need to deliver an image a fixed distance, T from the object -t t’ y f -y’ f T t t Eq 1: Throw is sum of object and image dists 1 1 1 t t f Eq 2: Gaussian thin lens equation in air t 2 tT T f 0 1 t T T 2 4T f 2 Eliminate t’ and solve for t Two solutions (t and t’ interchange roles) with the minimum throw being T = 4f and t=t’=2f. Robert McLeod Mouroulis and Macdonald 3.5.6 45 •Design of ideal imaging systems with geometrical optics –Paraxial, thin lenses and graphical ray tracing ECE 5616 OE System Design Single lens design problem Summary Possible unknowns: t, t’, T, M, f. Equations: T t t t M t 1 1 1 t t f So given any two variables, we can solve for the remainder. The Newtonian form of the thin lens equation can be handy if f and M are given: z t f f M z t f f M Commonly in camera sorts of applications, T and M are given. T t t f 1 M1 f 1 M f T 1 M1 1 M TM M 1 2 Work through the examples 3.2 and 3.3 to be sure you are comfortable with the sign conventions. Do graphical sketches to confirm the equations. Robert McLeod 46