Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
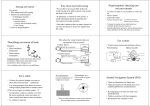
Evolving robot brains using vision Lisa Meeden Computer Science Department Swarthmore College Can be used in a variety of classes Introduction to Cognitive Science Artificial Intelligence Students observe and describe results of evolution Students modify the evolutionary process and report on the different outcomes Robotics Students use this example as a base for designing their own projects Genetic Algorithm Start with a random population of individuals For each generation of the evolution process: Fitness proportionate selection Reproduction Mutation Repeat until best member of population is good enough Framework Pyrobot simulator Green robot Evolving brain Sensors: camera and sonar Red robot Fixed brain: move straight and avoid obstacles Sensors: sonar Genetic Algorithm Details Evolve the weights of a fixed size 3-layer neural network that maps sensors to motors Initialize 10 neural networks with random weights Allow robot to move for 250 steps, fitness based on: Absolute value of translation speed Whether the robot is stalled Centeredness of red blob in camera image Closeness of red blob in camera image Evolve for 10 generations, saving the best weights from each generation QuickTime™ and a mpeg4 decompressor are needed to see this picture. QuickTime™ and a mpeg4 decompressor are needed to see this picture. Conclusions Using vision in a very simplified way, but it enables students to appreciate the power of evolution in a relatively short demonstration Evolving neural network weights, rather than using fully supervised algorithms such as backpropagation, allows students to create more openended robot learning problems