Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Frictional contact mechanics wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Bra–ket notation wikipedia , lookup
Classical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Four-vector wikipedia , lookup
Fictitious force wikipedia , lookup
Jerk (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Equations of motion wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Variable speed of light wikipedia , lookup
Rigid body dynamics wikipedia , lookup
CONSTANT-SPEED RAMPS
OSCAR M. PERDOMO
Abstract. It is easy to show that if the kinetic coefficient of friction between a block and a ramp
is µk and this ramp is a straight line with slope −µk then, this block will move along the ramp with
constant speed. A natural question to ask is the following: besides straight lines, are there more
shapes of ramps such that a block will go down on the ramp with constant speed? Here we classify
all the possible shapes of these ramps and, surprisingly we will show that the planar ramps can
be parametrized in terms of elementary functions: trigonometric functions, exponential functions
and their inverses. They provide basic examples of explicitly parametrized arc-length parameter
curves. A video explaining the main results in this paper can be found in one of the following URLs:
http://www.youtube.com/watch?v=iBrvbb0efVk
http://www.ccsu.edu/cf_media/index.cfm?g=871
1. Introduction
It is experimentally known that when a block slides on a surface under the presence of gravity,
besides the force made by the surface on the block -called normal force- there is a second force on
the block with direction opposite to the direction of the velocity vector of the block and length
proportional to the length of the normal force. This second force is called the friction force. If we
use bold font letters to denote vectors and we use the same letter (not highlighted) to represent
their magnitude, the friction force F satisfies the following equation
(1.1)
F = µN
where N is the normal force and µ is constant called kinetic coefficient of friction. In this paper we
will assume that formula (1.1) holds true, even though in real life it is just a good approximation
and its formal deduction from basic physical laws is not known. Let us quote Feynman in this
regard [1]: “It is quite difficult to do accurate quantitative experiments in friction, and the laws of
friction are still not analyzed very well, in spite of the enormous engineering value of an accurate
analysis. Although the law F = µN is fairly accurate once the surfaces are standardized, the reason
for this form of the law is not really understood."
We will take Equation (1.1) and the discussion on the direction of the forces in the previous paragraphs as a definition for friction force and kinetic coefficient of friction. One of the difficulties
dealing with friction forces is that they are not continuous due to the fact that their direction must
be opposite to the velocity vector of the block. For example, friction forces are responsible of making
a car stop, they produce a force opposite to the motion of the car but once the car has stopped,
these forces disappears.
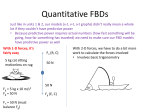
A basic computation shows that given a kinetic coefficient of friction µk , the angle of a linear ramp
can be adjusted so that a block on this ramp will move down with constant speed. In order to
cancel the gravity force, the friction force and the normal force, it is enough to take a ramp given by
a line with slope −µk , this is, we must take the inclination of the ramp to be θ0 with tan(θ0 ) = µk .
See Figure 1.1.
Date: September 2, 2013.
1
CONSTANT-SPEED RAMPS
2
Μk =coefficient of friction
Θ0
If tanHΘ0 L= Μk , then the block will move down with constant speed
Figure 1.1. A block sliding down under the effect of gravity and the friction force.
This figure shows the three forces acting on the block. The dashed forces are just a
decomposition of the gravity force.
In this paper we study other ramps on which a block can slide down with constant speed only under
the effect of the gravity and the friction force. Let us mention some of the differences and similarities
between the motion on a linear ramp and on these other ramps: (i) As it happens for linear ramps,
if a block is moving with constant speed on any ramp only under the effect of the gravity and
friction force, then the velocity vector of the block must have a negative vertical component, this is,
the motion must be downward (see Proposition 3.2) (ii) When the ramp is linear, the angle of the
ramp (i.e. the shape of the ramp) is independent of the velocity of the block, it only depends on
the coefficient of friction. For other ramps, the shape of the ramp depends on the desired constant
speed of the block. Corollary 4.2 provides an exact procedure about how to change the shape of
the ramp according to the desired constant speed of the block.
Let us assume that we want a block to move down with speed v0 and we know that the kinetic
coefficient of friction is µk . In this note we classify the shapes of all possible ramps on which this
block will move down with speed v0 . For 2-dimensional ramps, here is how you would built this
g
, where g is the acceleration
constant-speed ramp. Given v0 and µk = tan(δ), let us define a = v2 sin
δ
0
due to the gravity, and,
(1.2)
1
−2as 2
−as
α(s) = s + ln(1 + e
), arccot(e )
a
a
This curve α has an U shape with two horizontal asymptotes, one at y = 0 and the second one at
y = πa . See Figure 1.2. We have:
If we clockwise rotate the curve α an angle δ (see Figure 1.3), then, the highest point divides this
rotated curve in two ramps on which a block can move down with constant speed v0 under the
assumption that the kinetic coefficient of friction is µk = tan(δ)
The sequence of pictures at the end of the paper shows how the motion on the ramps takes place
when the desired speed is 5 m
s and µk = 0.5. The picture also displays the three forces acting on
the block under the assumption that the mass is 1 Kg and g = 9.81 sm2 (recall that g changes from
place to place on the Earth). On the highest part of the ramp on the left, the normal force is zero;
also, the normal force in the upper part of this ramp is pointing down, the bock does not fall down
due to its speed.
CONSTANT-SPEED RAMPS
3
Π
a
The curve ΑHsL
Figure 1.2. This is the graph of the curve α, it has two horizontal asymptotes that
are separated πa . The parameter s in the parametrization provided in the definition
of α is arc-length.
1.5
1.0
0.5
0.0
2
4
6
8
-0.5
-1.0
-1.5
The curve ΑHsL inclined an angle Θ0
-2.0
Figure 1.3. Graph of the two constant-speed ramps. At the highest point, a block
with speed v0 must be placed on top if we want to use the ramp to the right of this
highest point, and, it must be placed under, if we want to use the ramp to the left
of this highest point.
In section 2 we provide a first proof for the classification of two dimensional ramps. In section 3 we
provide a formal definition of ramp in order to state the result as a mathematical theorem. This
section may be omitted. Section 4 deals with 3-dimensional ramps.
The author would like to express his gratitude to Frank Gould, Roger Vogeler, Nidal Al-Masoud
and Clifford Anderson for their valuable comments on this work. He would also like to thank the
referee for several comment that helped improve this paper.
2. A first approach
Let us find all the possible 2-dimensional curves with the property that a block, sliding down on it,
will move with constant speed v > 0 under the assumption that the kinetic coefficient of friction is
µ = tan(δ) for some constant δ between 0 and π4 radians. Let us start by assuming that this curve
is parametrized by arc-length, this is, if α(s) = (x(s), y(s)) denotes such a curve, then |α0 (s)| = 1.
Under this assumption we can assume that for a smooth function θ(s) we have
x0 (s) = cos(θ(s)) and y 0 (s) = sin(θ(s))
The function θ(s) will help us describe the curve α. It is clear that the vector n(s) = (− sin(θ(s)), cos(θ(s)))
is a unit vector perpendicular to α0 (s) and the chain rule give us that α00 (s) = θ0 (s) n(s). Figure
2.1 shows these two vectors
CONSTANT-SPEED RAMPS
4
y
nHsL = H-sinHΘHsLL , cosHΘHsLLL
x
ΑHsL
Α' HsL = HcosHΘHsLL , sinHΘHsLLL
Figure 2.1. We are assuming that the parameter s is arc-length parameter. The
vectors α0 (s) and n(s) are perpendicular.
Let us assume that β(t) = α(vt) describes the motion of the block. Since s = vt and s is arc-length
parameter, then the speed of the block is constant, it is v. Since we have that β 00 (t) = v 2 α00 (vt)
then, Figure 2.2 shows the free body diagram for the problem of making the block move along α
with constant speed v.
m
N=Λn
d2 Β
dt2
HsL = m v2 Θ' HsL n
- Μ Λ Α' HsL
=
Free body diagram
H0,-mgL
Figure 2.2. By Newton’s second law, the sum of the normal force N plus the weight
plus the friction force must be mβ 00 .
As the free body diagram shows, the following equation must hold true. (A free body diagram is
essentially a picture that shows the forces acting on a body. For further discussion on Free body
diagrams we refer to [3])
(2.1)
mv 2 θ0 (s)n(s) = λ(s) n(s) − tan(δ)λ(s)α0 (s) − (0, mg)
By doing the inner product of both sides of the equation (2.1) with the vector α0 (s) we obtain that
λ(s) = −mg cot(δ) sin(θ(s))
Likewise, by doing the inner product of both sides of the equation (2.1) with the vector n(s), we
g
obtain that mv 2 θ0 = λ − mg cos(θ) and therefore, if a = v2 sin(δ)
, then
(2.2)
θ0 (s) =
−g
v 2 sin(δ)
sin(θ(s) + δ) = −a sin(θ(s) + δ)
Since the differential equation (2.2) does not have the variable s, then, all the solutions differ by
a horizontal translation. This is, if θ(s) is a solution, then θ(s + c) is also a solution for every
real number c. Due to the geometry of our problem we do not need to consider an integrating
CONSTANT-SPEED RAMPS
5
constant, since just one solution will give us all the solutions α(s). Recall that the equilibrium
solution of the differential equation (2.2) is θ(s) = −δ for all s. This solution corresponds to the
case α(s) = (cos(δ) s, − sin(δ) s) which is the straight line ramp shown in Figure 1.1. When we solve
this differential equation by separation of variables
R we notice that we need to integrate the function
csc(θ + δ).
Instead
of
using
the
classical
formula
csc(u) du = − ln(csc(u) + cot(u)) we will use the
R
formula csc(u) du = ln(tan( u2 )) which lead us to the formula
θ(s) = −δ + 2 arctan(e−as )
It is clear that if γ(s) = (z(s), w(s)) denotes a counterclockwise rotation of δ radians of the curve
α(s), then
z 0 (s) = cos(2 arctan(e−as )) and w0 (s) = sin(2 arctan(e−as ))
Integrating the equations above we obtain that
z(s) = s +
ln(1 + e−2as )
a
and w(s) =
2
arccot(e−as )
a
The curve (z(s), w(s)) is shown in Figure 1.2. As mentioned in the introduction, the solution that
we are looking for is a clockwise rotation of the curve γ by an angle δ. In the next section we give
a more detailed explanation of this solution.
3. Understanding the solution of the ODE. A mathematical definition of ramp
With the intension of setting up notation, let us start with the following well known definition (see
for example reference [2]).
Definition 1. We will say that a curve γ : [a1 , a2 ] → R2 is regular if γ 0 (t) never vanishes. We say
n : [a1 , a2 ] → R2 is a normal of the curve γ, if n(t) has length 1 and the inner product of n(t) and
γ 0 (t) is zero, this is, n(t) · γ(t) = 0 for all t.
Intuitively we can think of a planar ramp as a two dimensional region whose boundary is a curve.
It is clear that the interesting part of the ramp is a portion of the boundary of the region. The
following definition provides an alternative way to describe a ramp without mentioning the two
dimensional region. Figure 3.1 provides the interpretation of our definition.
Definition 2. A ramp in the plane R2 is an ordered pair (γ, n) where γ : [a1 , a2 ] → R2 is a regular
curve and n : [a1 , a2 ] → R2 is a normal. We will interpret the ramp (γ, n) as a portion of the plane
whose boundary contains γ and its outer normal vector is n.
Example 1. (γ1 , n1 ) where γ1 , n1 : [0, π] → R2 are given by γ1 (t) = 5(cos(t), sin(t)) and n1 (t) =
(cos(t), sin(t)) is an example of a ramp. This ramp is shown in the first two images in Figure 3.1.
(γ2 , n2 ) where γ2 , n2 : [0, π] → R2 are given by γ2 (t) = 5(cos(t), sin(t)) and n2 (t) = −(cos(t), sin(t))
is an example of a ramp. This ramp is shown in the last two images in Figure 3.1.
The following definition is based on Newton’s second law.
CONSTANT-SPEED RAMPS
6
6
6
5
5
4
4
3
3
3
2
2
2
2
1
1
1
1
6
6
n1 HtL
5
4
-6
-4
-2
Γ1 HtL
2
4
6 -6
-4
-2
5
Γ2 HtL
0
2
4
6 -6
-4
-2
4
n2 HtL
3
2
4
6 -6
-4
-2
0
2
4
Figure 3.1. A normal vector of a curve helps us to define the part of a curve where
we want a object to slide on a ramp
Definition 3. A ramp with external force is a triple (γ, n, F) where F : [a1 , a2 ] → R2 is a
smooth function and (γ, n) is a ramp. Given a positive number m, a solution of the ramp with
external force (γ, n, F) is given by a curve β(t) = γ(h(t)) (Notice that β is just a re-pametrization
of the curve γ and it is completely determined by the function h : [a1 , a2 ] → R) and a nonnegative
function λ : [a1 , a2 ] → R such that
F(h(t)) + λ(t)n(h(t)) = mβ 00 (t)
Remark 3.1. In Definition 3, the term λ(t)n(t) represents the force that the surface of the ramp is
doing on the object under the action of the external force F. By Newton’s third law, −λ(t)n(t) is
the force that the object is doing to the ramp. The condition λ ≥ 0 is needed so that the object
stays on the ramp. Also notice that the curve β(t) describes the position of the object at time t.
Example 2. If (γ, n) is a ramp, m > 0 and F(t) = (0, −g m) where g is the gravitational acceleration, then, the triple (γ, n, F) represents the action of the gravity acting on a particle with mass m
that moves on the ramp without friction.
The following easy example illustrates that not every ramp with external force has a solution.
Example 3. Let us consider the ramp (γ, n) where γ, n : [−1.5, 1.5] → R2 are given by γ(t) = (t, t2 )
and n(t) = ( √4t2t2 +1 , √4t−1
). If we assume that the mass of the block is 1 Kg, and F(t) = (0, −9.81)
2 +1
then, the ramp with external force (γ, n, F) has no solution. Figure 3.2 shows this ramp.
Proof. Let us argue by contradiction. If a solution exists, there will exist a positive function λ(t)
and a function h(t) such that
2h(t)
−1
(0, −9.81) + λ(t)( p
,p
) = β 00 (t) = (h00 (t), 2(h0 (t))2 + 2h(t)h00 (t) )
2
4h (t) + 1
4h2 (t) + 1
If we make the dot product with the vector (2h(t), −1) on both sides of the equation above we
obtain the following equation
p
9.81 + λ(t) 4h2 (t) + 1 = −2 (h0 (t))2
The last equation is impossible because we are assuming that λ(t) is a positive function. This
finishes the argument of the proof.
Definition 3 provides the definition of the solution of a particle moving on the ramp under the action
of the force F. In the case that F denotes all the forces acting on the particle that moves on the
ramp but the friction force, the definition of solution needs to be changed to:
6
CONSTANT-SPEED RAMPS
7
4
3
There is not solution for this
ramp if FHtL=H0,- 9.81L
2
1
0
-1
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
Figure 3.2. Some ramps with external force do not have a solution.
Definition 4. Given a ramp with external force (γ, n, F) defined on the interval [a1 , a2 ] and two
positive numbers µ < 1 and m, a solution of the ramp with external force (γ, n, F) and
kinetic coefficient of friction µ is given by a curve β(t) = γ(h(t)) and a nonnegative function
λ : [a1 , a2 ] → R such that
F(h(t)) + λ(t)n(h(t)) − µλ(t)
β 0 (t)
= mβ 00 (t)
|β 0 (t)|
Intuitively, when we think of a block moving with constant speed on a ramp, we think of the block
moving down. The following proposition shows, using Definition 4, that indeed the block must move
down.
Proposition 3.2. Let us assume that F = (0, −gm) is the gravitational force, µ represents a
kinetic coefficient of friction and m represents a mass. Let us further assume that β(t) = γ(h(t)) is
a solution of the ramp with external force (γ, n, F) and kinetic coefficient of friction µ. If the speed
of the solution is constant, then the velocity vector of the solution β cannot point up, this is, for any
t, the dot product β 0 (t) · (0, 1) cannot be positive.
Proof. Since we are assuming that the curve γ is regular, then we can find a re-parametrization
γ̃ that is parametrized arc-length (see for example [2]). This is, we can write γ(t) = γ̃(g(t)). We
therefore have that
β(t) = γ(h(t)) = γ̃(g(h(t)) = γ̃(h̃(t)) where h̃ = g ◦ h
Since γ̃ is parametrized by arc-length and we are assuming that the speed of β is constant then we
have that the function h̃0 is constant, this is h̃0 (t) = v for all t and for some non-zero real number
v. Therefore β 00 (t) = v 2 γ̃ 00 (t). Since we are assuming that β is a solution of the ramp with external
force (γ, n, F) and kinetic coefficient of friction µ, then
(0, −gm) + λ(t)n(h(t)) − µλ(t)
β 0 (t)
= mβ 00 (t)
|β 0 (t)|
Multiplying the equation above by the velocity vector β 0 (t) = vγ̃ 0 (t) and keeping in mind that: (i)
this velocity vector is perpendicular to the normal vector n and (ii) the acceleration vector β 00 is
parallel to normal vector n; we obtain that
CONSTANT-SPEED RAMPS
8
−gmβ 0 (t) · (0, 1) − µλ(t)|v| = 0
From the equation above we conclude that β 0 (t) · (0, 1) cannot be positive. This concludes the
proof.
Remark 3.3. Let us define an elementary function to be a function of one variable with real values
built from a finite number of trigonometric, exponential, constant, nth power functions and their
inverses, through composition and using the four basic elementary operation (+, -, ×, ÷). When
we want to define basic examples of curves defined by arc-length parameter, that is, if we want to
define γ(s) = (x(s), y(s)) such that x0 (s)2 + y 0 (s)2 = 1 for all t, then, the first thing that comes to
our mind if to find easy possibilities for x0 (t) and y 0 (t). The easiest one would be a pair of numbers
c1 and c2 such that c21 + c22 = 1. If we make x0 (s) = c1 and y 0 (s) = c2 then after and easy integration
we obtain that the curve γ is a straight line. If we want to use the fact that cos(as)2 + sin(as)2 = 1
and we decide to make x0 (s) = cos(as) and y 0 (s) = sin(as), then, after an easy integration we obtain
that γ should be a circle. The most important curves in this paper are those that are obtained by
using the identity
tanh(t)2 + sech(t)2 = 1 for all t
That is, we will be using curves that satisfy x0 (s) = tanh(as) and y 0 (s) = sech(as).
The following lemma is a direct computation and provides a definition of the curve α whose graph
is shown in Figure 1.2
Lemma 3.4. For any non zero real number a, the curve
(3.1)
1
−2as 2
−as
), arccot(e )
α(s) = (x(s), y(s))) = s + ln(1 + e
a
a
is an arc-length parametrized curve. Moreover,
x0 (s) = tanh(as)
and
y 0 (s) = sech(as)
Lemma 3.5. For any positive number δ smaller than π2 , if αδ represents the curve obtained by
rotating an angle of δ radians the curve α = (x(s), y(s)) defined in Lemma 3.4, this is, if
(3.2)
αδ (s) = (xδ (s), yδ (s)) = (cos(δ)x(s) + sin(δ)y(s), − sin(δ)x(s) + cos(δ)y(s))
then, the maximum value for the second entry of αδ is achieved when s =
have that
(3.3)
arcsinh(cot(δ))
a
. Also, we
αδ00 (s) · (yδ0 (s), −x0δ (s)) = a sech(as)
The graph of the curve αδ is shown in Figure 1.3.
Proof. A direct computation using Lemma 3.4 shows that yδ0 (s) = − sin(δ)tanh(as)+cos(δ)sech(as),
arcsinh(cot(δ))
then we can see that the only solution of the equation yδ0 (s) = 0 is s =
. In order to
a
prove the identity 3.3 we point out that since the inner product is invariant under rotations, this
identity is equivalent to show that α00 (s) · (y 0 (s), −x0 (s)) = a sech(as) which follows because,
CONSTANT-SPEED RAMPS
9
x00 (s)y 0 (s)−y 00 (s)x0 (s) = asech3 (as)+atanh2 (as)sech(as) = asech(as) (sech2 (as)+tanh2 (as)) = asech(as)
Remark 3.6. In the previous proof we got that yδ0 (s) = − sin(δ)sech(as)(sinh(as)−cot(δ)). It follows
that yδ0 (s) > 0 if s < s0 and yδ0 (s) < 0 if s > s0 .
Definition 5. For any positive number δ smaller than
and (γ̃δ , ñδ ) on the interval [0, ∞) by
π
2
and any a > 0 we define the ramps (γδ , nδ )
γδ (s) = αδ (s0 − s)
and
nδ (s) = (yδ0 (s0 − s), −x0δ (s0 − s))
γ̃δ (s) = αδ (s + s0 )
and
ñδ (s) = (−yδ0 (s + s0 ), x0δ (s + s0 ))
and
arcsinh(cot(δ))
where s0 =
and the map αδ and the functions xδ and yδ are defined in Lemma 3.5.
a
These two ramps are shown in Figure 3.3.
0.05
0.1
~
Ramp HΓ∆ , n∆ L with ∆ =0.4 radians
~
HΓ ∆ , n∆ L with ∆ = 0.4 radians
0.00
0.0
-0.05
-0.1
-0.10
-0.2
-0.15
0.0
0.1
0.2
0.3
-0.3
0.4
0.2
0.4
0.6
0.8
1.0
Figure 3.3. The two ramps given in Definition 5
Let us state and proof the main theorem in this section.
Theorem 3.7. Given an angle δ between 0 and π4 radians and a positive speed v > 0, let us consider
g
and F(t) = (0, −mg) with g is the acceleration due to the gravity. We have
µ = tan(δ), a = v2 sin
δ
a.) For the ramp (γδ , nδ ) given in Definition 5,
β(t) = γδ (vt)
and
λ(t) = mg cot(δ) yδ0 (s0 − vt)
is a solution for the ramp with external force (γδ , nδ , F) and kinetic coefficient of friction tan(δ).
b.) For the ramp (γ̃δ , ñδ ) given in Definition 5,
β(t) = γ̃δ (vt)
and
λ(t) = −mg cot(δ) yδ0 (s0 + vt)
is a solution for the ramp with external force (γ̃δ , ñδ , F) and kinetic coefficient of friction tan(δ).
c.) Since in both cases |β 0 (t)| = v, then these motions have constant speed.
CONSTANT-SPEED RAMPS
10
Proof. Let us prove part a.). First of all, notice that as it is required by Definition 4, λ > 0 by
remark 3.6. From the definition of β we obtain that
β 0 (t) = −vαδ0 (s0 − vt) and β 00 (t) = v 2 αδ00 (s0 − vt)
therefore the equation
F(h(t)) + λ(t)n(h(t)) − µλ(t)
β 0 (t)
= mβ 00 (t)
|β 0 (t)|
is equivalent to
(3.4)
(0, −mg) + λ(t)nδ (vt) + tan(δ)λ(t)αδ0 (s0 − vt) = mv 2 αδ00 (t)
Notice that the vector u1 = nδ (vt) and u2 = αδ0 (s0 − tv) form an orthonormal basis. Therefore in
order to prove equation (3.4) it is enough to prove that the dot product with u1 and u2 of the left
hand side (LHS) and right hand side (RHS) of the equation is the same. The dot product of the
LHS of equation (3.4) with u1 is equal to
mg x0δ (s0 − vt) + λ(t) = mg x0δ (s0 − vt) + mg cot(δ)yδ0 (s0 − vt)
= mg (cos(δ)tanh(a(s0 − vt)) + sin(δ)sech(a(s0 − vt))) +
mg cot(δ) (− sin(δ)tanh(a(s0 − vt)) + cos(δ)sech(a(s0 − vt)))
mg
=
sech(a(s0 − vt))
sin(δ)
Using Equation (3.3) we get that the dot product of the RHS of equation (3.4) with u1 is equal to
mv 2 asech(a(s0 − vt)) =
mg
sech(a(s0 − vt))
sin(δ)
Therefore LHS · u1 =RHS · u1 . It is easy to check that the dot product of the RHS of equation
(3.4) with u2 vanishes. On the other hand, the dot product of the LHS of the equation (3.4) with
u2 equals to
−mg yδ0 (s0 − vt) + v tan(δ) λ = −mg yδ0 (s0 − vt) + tan(δ) mg cot(δ)yδ0 (s0 − vt) = 0
Therefore part a.) follows. Part b.) is similar. Part c.) follows because |α0 | = 1 and since αδ is a
rotation of α then |αδ0 | = 1, then, β 0 (t) = −vα0 (s0 − vt) and |β 0 (t)| = v
CONSTANT-SPEED RAMPS
11
4. 3-Dimensional ramps
In this section we describe ramps in the space on which an object can move with constant speed v0
under the assumption that the kinetic coefficient of friction is µ. We will prove that fixing v0 and
µ, there are as many different ramp as continuously differentiable unit tangent vector fields in the
south hemisphere. In the correspondence that we will establish, the ramp that we defined in section
2 corresponds to a particular choice of a tangent vector field.
For curves that represent planar ramps, we got a description of them by studying first their velocity
vector. Recall that the function θ(s) was used to described a point in the lower part of the semicircle
that represented a possible velocity vector of the curve that describe the ramp. See Figure 4.1. When
this curve is free to move in the whole 3-dimensional space, the tangent unit vector to the curve
lies in the unit sphere and since the block must go down the ramp we can assume that the tangent
unit vector of the ramp lies in the shouth hemisphere. See Figure 4.1.
1
0
-1.0
0.5
-0.5
1.0
Θ
-1
0
-0.2
Α'HsL=Hy1, y2, y3L
0.0
-1
-0.4
1.0
-0.5
'
Α HsL=Hy1, y2L=Hcos Θ, sin ΘL
0.5
-2
-0.6
-1.0
0.0
-1.0
-3
-0.8
-0.5
-1
-0.5
0.0
Hy1, y2L
0
0.5
-1.0
1
-1.0
1.0
Figure 4.1. The unit tangent vector of a possible ramp in the plane lies in the
lower part of the unit semicircle. If the ramp is free to move in the whole space, then
the unit tangent vector lies in the lower hemisphere of the unit sphere.
In order to completely determine the ramp we need to specify the desire direction of the normal to
the ramp, see Figure 4.2. We can do this by choosing a unit normal vector field H(y) defined in the
lower hemisphere and requesting the normal vector of the ramp to be equal to N(y) anytime the
tangent unit vector to the ramp is the vector y. See Figure 4.3.
1
1
0
0
1
-1
-1
0
0
0
-1
0
-1
-1
-1
-2
-2
-2
-3
-3
-3
-1
-1
-1
0
0
1
0
1
1
Figure 4.2. To build a ramp we need to decide about the normal direction at every
point in the ramp.
We will prove that for any continuously differentiable choice of a normal field N(s) in the lower
hemisphere, there exists a family of ramps on which a motion with constant speed is possible under
the effect of the gravity force and the force of friction. More precisely we have.
CONSTANT-SPEED RAMPS
12
Α' HsL=Hy1 , y2 , y3 L
0.0
1.0
-0.5
0.5
-1.0
0.0
-1.0
-0.5
-0.5
0.0
0.5
-1.0
1.0
Figure 4.3. We will make the choice of the normal direction on the ramp to depend
on the unit tangent vector.
Theorem 4.1. Let Σ = {(y1 , y2 , y3 ) ∈ R3 : y12 + y22 + y32 = 1 and y3 ≤ 0} denote the south
hemisphere and let N : Σ → R3 be any continuously differentiable unit tangent vector field. This
is, for any y ∈ Σ, N(y) has norm 1 and N(y) is perpendicular to y. For any positive numbers m, v
and µ < 1, and any y0 ∈ Σ, there exists a unique curve α(s) parametrized by arc-length, such that
α(0) = (0, 0, 0), α0 (0) = y0 and the motion along β(t) = α(vt) in the ramp given by
R(s, r) = α(s) + r α0 (s) × N(α0 (s))
represents a motion that is a solution of Newton’s second law for a block with mass m that moves
on the ramp under the assumption that the only forces acting on the block are gravity and a friction
force with kinetic constant coefficient µ. Recall that since the parameter s is arc-length parameter,
then |β 0 (t)| = v for all t; this is, the motion has constant speed v.
Proof. Recall that we are denoting by u · w the dot (or inner) product of the two vectors u and w.
3
T
A direct computation shows that if e3 = (0, 0, 1), then eT
3 : Σ → R given by e3 (y) = e3 − (e3 · y) y
T
is a tangent vector field. Notice that e3 (y) must be in the tangent space Ty Σ because eT
3 (y) · y = 0.
Let λ : Σ → R be the function given by
g
g
λ(y) = − e3 · y = − y3
µ
µ
Notice that since y3 ≤ 0 then λ ≥ 0 and λ only vanishes on the boundary of Σ, (recall that the
boundary of Σ is given by the equation y3 = 0). Let us consider the tangent vector field
(4.1)
g
1
X = − 2 geT
3 − λN(y) = − 2
v
v
eT
3
y3
+ N(y)
µ
Notice that along points in the boundary of Σ, X(y) = − vg2 e3 points toward Σ. It follows that any
integral curve of the tangent vector field X remain in Σ. Let γ(s) be the integral curve of the vector
field X that satisfies γ(0) = y0 . We will prove the Theorem by showing the curve α(s) given by
Z
α(s) =
s
γ(u) du
0
satisfies all the conditions in the theorem. Clearly, α(0) = (0, 0, 0) and α0 (0) = γ(0) = y0 . We also
have that s is arc-length parameter because |α0 (s)| = |γ(s)| = 1. A direct computation shows that
the normal vector of the surface (or ramp) R along the curve α (along points in the surface with
r = 0) is given by N(α(s)). We will now proof that Newton’s second law holds true for β(t) = α(vt).
CONSTANT-SPEED RAMPS
13
Notice that since v is constant, then β 0 (t) = vα0 (vt) = vγ(s) and β 00 (vt) = v 2 γ 0 (vt) = v 2 γ 0 (s). If m
denotes the mass of the particle and λ is defined as in the beginning of the proof, we have that
1
T
g
e
(γ)
−
λN(γ)
3
v2
g
= m(−g e3 + g(e3 · γ) γ − (e3 · γ) N(γ(t)))
µ
= −gme3 + mλN(γ(s)) − mλµγ(s)
mβ 00 (t) = mv 2 γ 0 (s) = −mv 2
From the equation above we conclude that the normal force made from the ramp to the block has
magnitude mλ. Notice that the last equation above is Newton’s second law.
It is clear that the form of the ramp depends on the desired constant speed that we want for the
block moving down on the ramp. For example if the block is to travel upside down on some portion
of the ramp and the speed v is not much, then, the curvature of that portion of the ramp must be
big so that the block does not fall off the ramp. The following corollary explains how to change the
ramp if we want to change the constant speed or if we want to change the gravity force.
Corollary 4.2. a.) If a ramp R ⊂ R3 does the work of allowing a block to move down with constant
speed v and gravity g, then, for any positive κ the ramp κR
√ = {κ(x, y, z) : (x, y, z) ∈ R} does the
work of allowing a block to move down with constant speed κv and gravity g.
b.) If a ramp R ⊂ R3 does the work of allowing a block to move down with constant speed v and
gravity g, then, for any positive κ the ramp κR = {κ(x, y, z) : (x, y, z) ∈ R} does the work of
allowing a block to move down with constant speed v and gravity κg .
Proof. This corollary is a consequence definition of the vector field XR in Equation (4.1). We can
s
check that if γ(t) is an integral curve of the vector field X, and α(s) = 0 γ(u) du, then γ̃(τ ) = γ( κτ )
is a solution of the vector field κ1 X, which can be interpreted as either the vector field coming from
√
the tangent unit vector field N(y) with velocity κ v and gravity g or it can be interpreted as the
vector field coming from the tangent unit vector field N(y), with velocity v and gravity κg . The
result follows by noticing that
Z
α̃(s) =
s
Z
γ̃(u) du =
0
0
s
u
γ( ) du = κ
κ
Z
0
s
κ
s
γ(v) dv = κ α( )
κ
Remark 4.3. If a ramp R on Earth has the property that an object will fall down with constant
speed v, then, if we dilate this ramp by a factor of 6, the same block will move down with the same
constant speed v on this dilated ramp when it is placed on the Moon.
CONSTANT-SPEED RAMPS
14
4
4
4
4
2
2
2
2
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
-2
-2
-2
-2
-4
-4
-4
-4
Normal =
Normal =
80.0064214, -0.35489<
-6
Normal =
80.908835, -4.12376<
-6
acceleration =
-8
-8
friction =
friction =
82.06188, 0.454417<
friction =
84.01873, 2.09274<
4
4
2
2
2
2
4
6
8
10
12
-2
0
2
4
6
8
10
12
-2
-4
acceleration =
10
12
friction =
815.9803, 4.16263<
80.506509, 9.78378<
friction =
8-2.39298, 9.18666<
2
2
2
2
8
10
12
-2
0
2
4
6
8
10
12
-2
-4
Normal =
acceleration =
87.13263, 5.73111<
8
10
12
84.50063, 4.69217<
friction =
acceleration =
82.84572, 3.56813<
8-4.90074, 4.70068<
friction =
8-4.78211, 3.81391<
2
2
2
2
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
-2
-2
-2
-2
-4
-4
-4
-4
Normal =
85.62119, 8.87073<
-6
Normal =
85.08049, 8.59464<
-6
acceleration =
81.18582, 1.87133<
-8
8-4.43537, 2.81059<
Normal =
84.71554, 8.38347<
-6
acceleration =
80.78317, 1.32489<
-8
friction =
8-4.29732, 2.54025<
2
8-4.60403, 3.21328<
4
6
Normal =
8
10
84.46772, 8.22777<
-6
acceleration =
80.523806, 0.931242<
-8
friction =
12
81.82253, 2.61135<
friction =
4
6
10
86.42657, 9.20807<
acceleration =
4
4
8
-8
4
2
6
Normal =
4
0
4
-6
-8
8-4.78992, 5.96127<
2
87.62782, 9.56421<
-6
acceleration =
0
-4
Normal =
-8
friction =
6
8-4.11083, 7.58083<
-2
89.40137, 9.80149<
-6
-8
4
-4
811.9225, 9.57984<
-6
2
-2
-4
Normal =
0
12
811.0508, 5.9925<
friction =
4
6
10
815.1617, 8.22167<
acceleration =
4
4
8
-8
4
2
6
Normal =
4
0
4
-6
-8
83.55388, 8.28567<
2
818.3733, 4.78597<
acceleration =
820.0741, -1.03924<
0
-4
Normal =
-8
friction =
8
-6
acceleration =
820.1252, -8.63209<
6
84.90132, 5.09493<
-2
819.5676, -1.01302<
-6
-8
4
-4
Normal =
816.5713, -7.10776<
-6
2
-2
-4
Normal =
0
12
815.0912, -14.5177<
friction =
4
2
10
-8
4
0
8
810.1899, -9.80264<
acceleration =
88.20421, -15.7547<
-8
80.177445, 0.0032107<
6
-6
acceleration =
82.97071, -13.4793<
4
Normal =
84.18548, -8.03747<
-6
acceleration =
80.183866, -10.1617<
2
acceleration =
80.353838, 0.651629<
-8
friction =
8-4.19174, 2.35777<
friction =
References
[1] Feynman, R. The Feynman lectures of physics, Addison-Wesley. (1989)
[2] Do Carmo, M Differential Geometry fo Curves and Surfaces, Practice-Hall. Englewood Cliffs, N.J., 1976.
8-4.11388, 2.23386<
12
CONSTANT-SPEED RAMPS
15
4
4
4
4
2
2
2
2
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
0
12
-2
-2
-2
-2
-4
-4
-4
-4
Normal =
84.29853, 8.11541<
Normal =
-6
84.18252, 8.0354<
Normal =
-6
acceleration =
80.240829, 0.454673<
-8
80.164825, 0.316658<
friction =
6
Normal =
80.11326, 0.220267<
8
10
12
84.04768, 7.93925<
acceleration =
-8
8-4.0577, 2.14927<
4
-6
acceleration =
-8
friction =
84.10271, 7.97891<
-6
acceleration =
2
80.0780503, 0.15309<
-8
8-4.0177, 2.09126<
friction =
8-3.98945, 2.05136<
friction =
8-3.96963, 2.02384<
Figure 4.4. Motion on the longest parts of the ramps
4
4
4
4
2
2
2
2
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
-2
-2
-2
-2
-4
-4
-4
-4
Normal =
Normal =
80.0064214, -0.35489<
-6
80.310093, 2.44701<
Normal =
-6
accel=
accel=
friction =
accel=
8-2.16236, 0.502362<
4
2
2
2
2
6
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
-2
-2
-2
-2
-4
-4
-4
-4
Normal =
82.30627, 6.31902<
Normal =
-6
82.7635, 6.82517<
Normal =
-6
accel=
-8
friction =
friction =
8-3.57874, 1.55065<
4
2
2
2
2
6
8
10
-2
12
0
2
4
6
8
10
-2
-4
83.51849, 7.52682<
-6
accel=
83.64085, 7.62743<
8-3.76341, 1.75925<
6
8
10
8-3.81372, 1.82043<
12
0
2
8-3.68919, 1.67252<
4
6
8
10
-4
83.72669, 7.69607<
Normal =
83.7867, 7.74312<
-6
accel=
accel=
8-0.121341, -0.250584<
-8
friction =
12
83.34505, 7.37838<
-2
Normal =
8-0.172864, -0.362144<
-8
friction =
4
-6
accel=
8-0.244918, -0.523932<
2
-4
Normal =
-6
-8
0
-2
-4
Normal =
12
10
8-0.344142, -0.759096<
friction =
4
4
8
-8
8-3.41259, 1.38175<
4
2
6
Normal =
4
0
4
accel=
8-0.477438, -1.10188<
-8
8-3.15951, 1.15313<
8-2.76922, 0.856487<
-6
accel=
8-0.649084, -1.60308<
-8
friction =
2
83.1013, 7.15747<
-6
accel=
8-0.853247, -2.33784<
12
8-1.05624, -3.41508<
friction =
4
4
10
81.71297, 5.53844<
accel=
8-1.15764, -4.98292<
friction =
4
2
8
-8
8-1.22351, 0.155046<
4
0
6
Normal =
-8
80.177445, 0.0032107<
4
-6
8-0.913413, -7.20794<
-8
friction =
81.00472, 4.32472<
-6
80.183866, -10.1617<
-8
2
8-0.0848611, -0.173526<
-8
friction =
8-3.84803, 1.86335<
friction =
8-3.87156, 1.89335<
Figure 4.5. Motion on the shortest parts of the ramps
[3] Ferdinand P. Beer, E. Russell Johnston, David F. Mazure k, Phillip J. Cornwell. Vector Mechanics for Engineers
: Statics and Dynamics , Ninth edition, Mc Graw Hill, 2010.
12
CONSTANT-SPEED RAMPS
Current address: Department of Mathematics, Central Connecticut State University, New Britain, CT 06050,
E-mail address:
[email protected]
16