Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
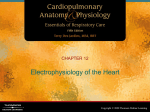
The PIC18 Microcontroller Chapter 1: Introduction to PIC18 The PIC18 Microcontroller Han-Way Huang Minnesota State University University, Mankato Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-1 The PIC18 Microcontroller What is a computer? Software Hardware Computer Hardware Organization P ro c e sso r C o m m o n B us ( addr e s s , data, & c o ntr o l) C o ntr o l U nit D atapath Ar ithm e tic L o gic U nit M e m o ry R e gis te r s P r o gr am D ata Sto r age Sto r age O utput U nits Input U nits Figur e 1 .1 C o m pute r O r ganizatio n Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-2 The PIC18 Microcontroller The processor Th Registers -- storage locations in the processor Arithmetic logic unit Control unit pprogram g counter contains the address of the next instruction to be executed status register flags the instruction execution result The microprocessor A processor implemented on a very large scale integration (VLSI) chip Peripheral chips are needed to construct a product The Microcontroller The processor and peripheral functions implemented on one VLSI chip Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-3 The PIC18 Microcontroller Features of the PIC18 microcontroller - 8-bit CPU - 2 MB program memory space - 256 bytes to 1KB of data EEPROM - Up to 3968 bytes of on-chip SRAM - 4 KB to 128KB flash program memory - Sophisticated timer functions that include: input capture, output compare, PWM, real-time interrupt, and watchdog timer - Serial communication interfaces: SCI, SCI SPI, SPI I2C, I2C and CAN - Background debug mode (BDM) - 10-bit A/D converter - M Memory protection t ti capability bilit - Instruction pipelining - Operates at up to 40 MHz crystal oscillator Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-4 The PIC18 Microcontroller Embedded Systems - A product that uses one or more microcontrollers as controller (s). - End users are only interested in the functionality of the product but not on the microcontroller itself. - Cell phones, home security system, automobiles, and many other products are examples of embedded products. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-5 The PIC18 Microcontroller Semiconductor memoryy • • Random-access memory (RAM): same amount of time is required to access any location on the same chip R d l memory (ROM): Read-only (ROM) can only l bbe read d bbutt nott written itt tto bby th the processor Random-access memory • • Dynamic random-access memory (DRAM): need periodic refresh Static random-access memory (SRAM): no periodic refresh is required Read-only memory • • Mask programmed read-only Mask-programmed read only memory (MROM): programmed when being manufactured Programmable read-only memory (PROM): can be programmed by the end user Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-6 The PIC18 Microcontroller Erasable programmable ROM (EPROM) 1. electrically programmable many times 2. erased by ultraviolet light (through a window) 3 erasable 3. bl in i bulk b lk (whole ( h l chip hi in i one erasure operation) ti ) Electrically erasable programmable ROM (EEPROM) 1. electrically programmable many times 2. electrically erasable many times 3. can be erased one location, one row, or whole chip in one operation Flash memory 1. electrically programmable many times 2. electrically erasable many times 3. can only be erased in bulk (either a block or the whole chip) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-7 The PIC18 Microcontroller Computer software - Computer programs are known as software A program is a sequence of instructions Machine instruction - A sequence of binary digits which can be executed by the processor Hardd to understand, d d program, andd debug d b for f human h being b i Assembly language - Defined by assembly instructions An assembly instruction is a mnemonic representation of a machine instruction A Assembly bl programs mustt be b translated t l t d before b f it can be b executed t d -translated by an assembler Programmers need to work on the program logic at a very low level and can’t achieve high g pproductivity. y Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-8 The PIC18 Microcontroller High-level language - Syntax of a high-level language is similar to English A translator is required to translate the program written in a high-level language -- done by a compiler Allows the user to work on the program logic at higher level. Source code - A program written in assembly or high-level language Object code - The output of an assembler or compiler Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-9 The PIC18 Microcontroller Source code and object code examples address object j code line no. Source code ---------------------------------------------------------------------------------------------00001E 0E06 00010 movlw 0x06 000020 6E11 00011 movwf 0x11,A , 000022 0E07 00012 movlw 0x07 000024 6E12 00013 movwf 0x12,A 0000266 0000 00E08 08 00014 000 movlw ov w 00x08 08 000028 6E13 00015 movwf 0x13,A 00002A 0E05 00016 movlw 0x05 00002C 5E10 00017 subwf 0x10,F,A 00002E 5E11 00018 subwf x11,F,A Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-10 The PIC18 Microcontroller Radix Specification p - Hexadecimal (or hex) number is specified by adding the prefix 0x or by enclosing the number with single quotes and preceding it by an H. - 0x02, 0x02 0x1234, 0x1234 H H`2040’ 2040’ are hex numbers - Decimal numbers are enclosed by single quotes and preceded by letter D. - D`10’ and D`123’ are decimal numbers - Octal and binary numbers are similarly specified. - O`234’ is an octal number; B’01011100’ is a binary number. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-11 The PIC18 Microcontroller Memory Addressing - Memory consists of a sequence of directly addressable locations. A llocation i is i referred f d to as an information i f i unit. i A memory location can be used to store data, instruction, and the status of peripheral devices. A memoryy location has two components: p an address and its contents. Address Contents Figure 1.2 The components of a memory location Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-12 The PIC18 Microcontroller The PIC18 Memory Organization - Data Memory and Program Memory are separated - Separation of data memory and program memory makes possible the simultaneous access of data and instruction. - Data memory are used as general-purpose registers or special function registers - On-chipp Data EEPROM are pprovided in some PIC18 MCUs Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-13 The PIC18 Microcontroller Separation of Data Memory and Program Memory Inside the c chip Program Memory Space (a portion of this space is on th c the chip) 12-bit register address 21-bit progam address PIC18 CPU 16-bit instruction bus 8-bit data bus Data Memory Space (Special function registers and generall purpose RAM) Figure 1.3 The PIC18 memory spaces Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-14 The PIC18 Microcontroller PIC18 Data Memory - Implemented in SRAM and consists of general-purpose registers and special-function registers. Both are referred to as data registers. - A PIC18 C 8 MCU CU may ay have ave up to 4096 096 bytes oof data memory. e o y. - Data memory is divided into banks. Each bank has 256 bytes. - General-purpose registers are used to hold dynamic data. - Special-function registers are used to control the operation of peripheral functions. - Only one bank is active at any time. The active bank is specified by the BSR register. register - Bank switching is an overhead and can be error-prone - PIC18 implements the access bank to reduce the problem caused by bank switching. - Access bank consists of the lowest 96 bytes and the highest 160 bytes of the data memory space. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-15 The PIC18 Microcontroller BSR<3:0> = 0000 = 0001 = 0010 = 0011 Access RAM Bank 0 Bank 1 GPRs 000h 05Fh 060h 0FFh 100h GPRs 1FFh 200h Bank 2 GPRs 2FFh 300h Bank 3 Access Bank GPRs A Access RAM llow 3FFh 400h Bank 4 to B k 13 Bank = 1110 = 1111 Access RAM high SFRs 000h 05Fh 060h 0FFh GPRs DFFh E00h Bank 14 GPRs Unused Bank 15 SFRs EFFh F00h F5Fh F60h FFFh Note. 1. BSR is the 4-bit bank select register. Figure 1.4 Data memory map for PIC18 devices (redraw with permission of Microchip) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-16 The PIC18 Microcontroller Program Memory Organization - The program counter (PC) is 21-bit long, which enables the user program to access up to 2 MB of program memory. - The PIC18 has a 31-entry return address stack to hold the return address for subroutine call. - After power-on, the PIC18 starts to execute instructions from address 0. - The location at address 0x08 is reserved for high-priority interrupt service routine. - The location at address 0x18 is reserved for low low-priority priority interrupt service routine. - Up to 128KB (at present time) of program memory is inside the MCU chip. - Part P t off the th program memory is i located l t d outside t id off the th MCU chip. hi Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-17 The PIC18 Microcontroller P C < 2 0 :0 > 21 s ta c k le v e l 1 . . . s ta c k le v e l 3 1 000000 h H ig h P r io r ity I n te r r u p t V e c to r 000008h L o w P r io r ity I n te r r u p t V e c t o r 000018h O n - c h ip a n d e x te r n a l p ro gra m m e m o ry y x x xx x h User Memory y Space R e s e t V e c to r U n im p le m e n t e d p ro gra m m e m o ry R e a d '0 ' 1FFFFFh N o te . y c a n b e 0 o r 1 w h e re a s x c a n b e 0 -F F ig u r e 1 . 5 P I C 1 8 P r o gr a m m e m o r y O r g a n iz a tio n ( r e d r a w w ith p e r m is s io n o f M ic r o c h ip ) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-18 The PIC18 Microcontroller The PIC18 CPU Register - The group of registers from 0xFD8 to 0xFFF are dedicated to the general control of MCU operation. - The h CPU registers i are listed li d in i Table bl 1.2. - The WREG register is involved in the execution of many instructions. - The STATUS register holds the status flags for the instruction execution and is shown in Figure 1.6. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-19 Copyright @ 2005 Thomson Delmar Learning TOSU TOSH TOSL STKPTR PCLATU PCLATH PCL TBLPTRU TBLPTRH TBLPTRL TABLAT PRODH PRODL IN TCON INTCON 2 INTCON 3 IN DF0 (1) POSTINC0 (11) POSTDEC0 ( 1) PREINC0 (1)) PLUSW 0 (1) FSR0H FSR0L W REG IN DF1 (1) POSTINC1 (11) POSTDEC1 ( 1) PREINC1 (1)) PLUSW 1 (1) FSR1H FSR1L BSR IN DF2 (1) POSTINC2 (11) POSRDEC2 ((1) PREINC2 (1)) PLUSW 2 (1) FSR2H FSR2L STATUS Description n Top of staack (upper) Top of staack (high) Top of staack (low ) Stack poi nter Upper prrogram counteer latch High pro gram counter latch Program counter low bbyte Table poiinter upper byyte Table poiinter high bytee Table poiinter low byte Table latcch High pro duct register duct register Low prod Interrupt control registter Interrupt control registter 2 Interrupt control registter 3 Indirect f ile register poointer 0 Post increem ent pointer 0 (to GPRs) Post decr em ent pointerr 0 (to GPRs) Preincrem m ent pointer 0 (to GPRs) Add W RE EG to FSR0 File selectt register 0 hi gh byte File selectt register 0 low w byte W orking register Indirect f ile register poointer 1 Post increem ent pointer 1 (to GPRs) Post decr em ent pointerr 1 (to GPRs) m ent pointer 1 (to GPRs) Preincrem Add W RE EG to FSR1 File selectt register 1 hi gh byte File selectt register 1 low w byte Bank seleect register Indirect f ile register poointer 2 Post increem ent pointer 2 (to GPRs) Post decr em ent pointerr 2 (to GPRs) m ent pointer 2 (to GPRs) Preincrem Add W RE EG to FSR2 File selectt register 2 hi gh byte File selectt register 2 low w byte Status reggoster N ote 1. This is not a physsical regiser 0xFFF 0xFFE 0xFFD 0xFFC 0xFFB 0xFFA 0xFF9 0xFF8 0xFF7 0xFF6 0xFF5 0xFF4 0xFF3 0xFF2 0xFF1 0xFF0 0xFEF 0xFEE 0xFED 0xFEC 0xFEB 0xFEA 0xFE9 0xFE8 0xFE7 0xFE6 0xFE5 0xFE4 0xFE3 0xFE2 0xFE1 0xFE0 0xFDF 0xFDE 0xFDD 0xFDC 0xFDB 0xFDA 0xFD9 0xFD8 Table 1.2 PIC T C18 CPU reg isters address N am e The PIC18 Microcontroller H. Huang Transparency No.1-20 -- -- -- 5 N 4 OV 3 Z 2 DC 1 Copyright @ 2005 Thomson Delmar Learning C 0 Figure 1.6 Thhe STATUS register (0xFD8) (reddraw with permisssion of Microchiip) occcurred. For boorrow, the polaritty is reversed. For rotate (RRF, RL LF) instrucctions, this bit is loaded with eitheer the high or low w order bit of the source register. DC: Digiit carry/borrow biit For AD DDWF, ADDLW W, SUBLW, SUB BWF instructions.. 1 = A carry-out from thhe 4th low-order bit of the result ooccurred. 0 = Noo carry-out from the 4th low-orderr bit of the result occurred. For boorrow, the polaritty is reversed. For rotate (RRF, RL LF) instrucctions, this bit is loaded with eitheer the bit 4 or bit 3 of the sourcee register. C: Carry//borrow bit For AD DDWF, ADDLW W, SUBLW, SUB BWF instructions.. 1 = A carry-out from thhe most significannt bit of the resullt occurred. 0 = Noo carry-out from the most significant bit of the resuult has N: Negattive bit 1 = ariithmetic result is negative 0 = ariithmetic result is positive OV: Oveerflow bit 1 = Ovverflow occurredd for signed arithm metic 0 = Noo overflow occurrred Z: Zero fflag 1 = Thhe result of an ariithmetic or logic ooperation is zero. 0 = Thhe result of an ariithmetic or logic ooperation is not zzero. 6 7 The PIC18 Microcontroller H. Huang Transparency No.1-21 The PIC18 Microcontroller The PIC18 Pipelining p g - The PIC18 Divide most of the instruction execution into two stages: instruction fetch and instruction execution. - Up to two instructions are overlapped in their execution. execution One instruction is in fetch stage while the second instruction is in execution stage. - Because of pipelining, each instruction appears to take one instruction cycle to complete. complete MOVLW 55h TCY0 TCY1 fetch 1 execute 1 fetch 2 MOVWF PORTB TCY2 TCY4 execute 3 fetch 4 BSF PORTA,BIT3 TCY5 execute 2 fetch 3 BRA sub_1 TCY3 Instruction @address sub_1 flush fetch sub_1 execute sub_1 Note: All instructions are single cycle, except for any program branches. Figure 1.7 An example of instruction pipeline flow Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-22 The PIC18 Microcontroller Instruction Format - Format for byte oriented instructions 15 10 opcode 9 8 d a 7 0 f d = 0 for result destination to be WREG register. d = 1 for result destination to be file register (f) a = 0 to force Access Bank a = 1 for BSR to select bank f = 8-bit file register address Figure 1.8 Byte-oriented file register operations (redraw with permission of Microchip) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-23 The PIC18 Microcontroller Byte-to-byte Operations 12 11 15 0 opcode 15 f (source file register) 12 11 0 1111 f (destination file register) f = 12-bit file register address Figure 1.9 Byte to byte move operations (2 words) (redraw with permission of Microchip) Bit-oriented file register operations 15 opcode 9 12 11 b 8 a 7 0 f b = 3-bit position of bit in the file register (f). a = 0 to force Access Bank a = 1 for BSR to select bank f = 8-bit file register address Figure 1.10 1 10 Bit-oriented Bit oriented file register operations (redraw with permission of Microchip) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-24 The PIC18 Microcontroller Literal operations - A literal is a number to be operated on directly by the CPU 15 8 opcode 7 0 k k = 8-bit immediate value Figure 1.11 Literal operations (redraw with permission of Microchip) Control operations - These instructions are used to change the program execution sequence and making subroutine calls. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-25 The PIC18 Microcontroller 15 8 7 0 opcode n<7:0> (literal) 15 8 1111 7 0 GOTO label n<19:8> (literal) n = 20-bit immediate value 15 8 opcode 7 0 S 15 8 1111 n<7:0> (literal) 7 0 CALL funct_name n<19:8> (literal) S = fast bit 15 11 10 0 opcode 15 n<10:0> (literal) 8 7 opcode BRA label 0 n<7:0> (literal) BC label Figure 1.12 Control operations (redraw with permission of Microchip) Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-26 The PIC18 Microcontroller Access Bank - In Figures 1.8 to 1.12, PIC18 uses 8 bits to specify a data register (f field). - Eight bits can specify only 256 registers. - This limitation forces the PIC18 to divide data registers (up to 4096 bytes) into banks. - Onlyy one bank is active at a time. - When operating on a data register in a different bank, bank switching is needed. - Bank switching incurs overhead and may cause program errors. errors - Access bank is created to minimize the problems of bank switching. - Access bank consists of the lowest 96 bytes in general-purpose registers and the highest 160 bytes of special function registers. - When operands are in the access bank, no bank switching is needed. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-27 The PIC18 Microcontroller Examples of the Use of Access Bank 1. addwf 0x20,F,A ; add the data register at 0x20 in access bank with WREG ; register and store the sum in 0x20. 2 subwf 0x30,F,BANKED 2. 0x30 F BANKED ; subtract the value of WREG from the data register ; 0x30 in the bank specified by the current contents ; of the BSR register. The difference is stored in ; data register 0x30. 33. addwf dd f 0x40,W,A 0 40 W A ; add dd the h WREG register i with i h data d register i at 0x40 0 40 in i ; access bank and leaves the sum in WREG. Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-28 The PIC18 Microcontroller PIC18 Addressing Modes - Register direct: Use an 8-bit value to specify a data register. movwf 0x20,A ; the value 0x20 is register direct mode - Immediate Mode : A value in the instruction to be used as an operand addlw 0x10 ; add hex value 0x10 to WREG movlw 0x30 ; load 0x30 into WREG - Inherent Mode: an implied operand andlw 0x3C ; the operand WREG is implied daw ; the operand WREG is implied Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-29 The PIC18 Microcontroller - Indirect Mode: A special function register (FSRx) is used as a pointer to the actual data register. Format INDFx Example x = 0, 0 1, 1 2 movwf INDF0 POSTINCx movff POSTINC0,PRODL POSTDECx movf POSTDEC0,W PREINCx addwf PREINC1,F PLUSWx movff PLUSW2,PRODL Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-30 The PIC18 Microcontroller PIC18 Instruction Examples p Data Movement Instruction lfsr FSR1,0xB00 ; place the value 0xB00 in FSR1 movf PRODL,W ; copy PRODL into WREG movff 0x100,0x300 ; copy data register 0x100 to data register 0x300 movwf PRODL,A ; copy WREG to PRODL swapf PRODL,F ; swap the upper and lower 4 bits of PRODL movb 3 ; load 3 into BSR movlw 0x10 ; WREG 0x10 Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-31 The PIC18 Microcontroller Add Instructions addwf 0x20,F,A ; add data register and WREG and place sum in WREG addwfc dd f PRODL W A PRODL,W,A ; add dd WREG, WREG PRODL, PRODL and d carry and d lleave sum ; in WREG addlw 0x5 ; increment WREG byy 5 Subtract Instructions subfwb PRODL F PRODL,F ; PRODL [WREG] – [PRODL] – borrow flag subwf PRODH,W ; WREG [PRODH] – [WREG] subwfb 0x10,F,A ; 0x10 [0x10] – [WREG] – borrow flag sublw 0x10 ; WREG 0x10 – [WREG] Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-32 The PIC18 Microcontroller RISC CISC Simple instruction set Complex instruction set R l andd fixed Regular fi d instruction i t ti format f t Irregular instruction format Simple address modes Complex address modes Pipelined instruction execution May also pipeline instruction execution Separated data and program memory Combined data and program memory Most operations are register to register Most operations can be register to memory Take shorter time to design and debug Take longer time to design and debug Provide large number of CPU registers Provide smaller number of CPU registers Copyright @ 2005 Thomson Delmar Learning H. Huang Transparency No.1-33