Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
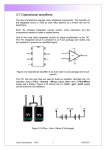
H. Ogawa et al. / Journal of Advanced Research in Physics 3(1), 011204 (2012) 1 A Time-of-Flight Measurement Circuit Using a Multiple-Stage Amplifier for a Range Finder with Wide Working Range Hiroki Ogawa1,*, Keita Yasutomi2 and Shoji Kawahito2 1 2 Graduate School of Science and Technology, Shizuoka University Research Institute of Electronics, Shizuoka University Abstract — This paper describes a time-of-flight (TOF) measurement circuit using a multiple-stage amplifier suitable for a TOF range finder. The multiple-stage amplifier together with a comparator in each stage allows us to obtain multiple TOF signals and to estimate the signal intensity dependent delay time of the measurement circuits. Using the estimated delay time of the measurement circuit, an accurate TOF can be estimated in a very wide working range. Simulation results show that the cascaded 6-stage amplifier works at the input signal photocurrent level from 10nA to 10mA sufficient range measurement accuracy in three decades of the working range. Keywords — time-of-flight, range finder, cascaded multiplestage amplifier, wide working range I. INTRODUCTION RANGE finders based on a time-of-flight (TOF) method are a preferred choice for distance measurements with wide working range [1]-[4]. In the TOF range finders, the distance to a target is determined by finding the roundtrip TOF of a light pulse. If the distance between the light source and target is very long, the range accuracy is affected by the attenuation of the light pulse power. Furthermore the light signal intensity is also affected by weather conditions such as in the rain or fog. The light signal attenuation causes a delay time in a TOF measurement circuit and a resulting measurement error because the small signal amplitude has a small driving force in the amplifier used in the TOF measurement circuit, causing a longer response time. On the other hand, if the distance between the light source to target is very short, a large amount of photocurrent signal due to the reflected light pulse with large optical power may cause the saturation of the signal in the TOF measurement circuit. These characteristics in the TOF measurements used in conventional systems make the development of a range finder with very wide working range difficult. This paper proposes a TOF measurement circuit suitable for a range finder with very wide working range. The proposed circuit technique uses a cascaded multiple-stage amplifier together with comparators used at the output of each stage for expanding the dynamic range of measuring Manuscript received October 12, 2011. * Corresponding author signals and the resulting wide working range by using multiple TOF signals obtained in the multiple stages. According to results of circuit simulation, a designed 6-stage cascaded amplifier can measure the TOF for the range of the input photocurrent level from 10nA to 10A. Since it is possible to estimate the delay time in the internal circuit and correct the measurement error of the TOF, the proposed multiple-point TOF measurement technique is able to greatly improve the range accuracy and working range. II. TOF MEASUREMENT USING MULTIPLE-STAGE AMPLIFICATION. A. Conventional TOF Range Finder A pulsed TOF range finding technique is a mature technology. Fig. 1 shows the block diagram of a conventional basic TOF range finder system. This system mainly consists of a computer for measuring distance and controlling the entire system, a laser diode (LD) transmitter and a receiver for sensing TOF signal lights. Fig. 2 shows the basic model of the TOF measurement circuit. A certain light pulse which has range information due to the TOF is received by a photo detector, such as a photodiode. The charge signal generated by the light pulse is detected in a frontend charge amplifier and then the delay time or TOF of the light pulse is detected by a comparator which is connected at the charge amplifier output. The output of the comparator is used for a gating signal to measure the TOF using a counter. Fig. 1. Block diagram of the basic TOF range finder system. Fig. 2. Basic model of the conventional TOF measurement circuit. 2 H. Ogawa et al. / Journal of Advanced Research in Physics 3(1), 011204 (2012) Although there are a lot of methods to measure the time interval in TOF range finder systems [4], the use of a time to digital converter (TDC) is straight forward. The TDC measures the time interval between the start signal provided by a command from the system and stop signal generated by the comparator output that indicates the TOF. The TOF can be measured using the TDC output and a post-processing in the computer. In the case of a basic TOF range finder system, the delay time which is mainly caused by a response time of charge amplifier in the TOF measurement circuit is added to the TOF information. It causes the measurement error of TOF distance. Obviously the measured total delay time Tm is the sum of the TOF and the delay time of the system, i.e., (1) = Tm TTOF + Td where Tm is the measured total delay time, TTOF is the true time of flight of light pulse and Td is the delay time of the measurement circuit. Delay time Td varies depending on the signal intensity of light pulse. This means that the range accuracy is affected by the attenuation of the light pulse of measuring signals. As the distance between the light source and the target becomes longer, a received signal generated by the light pulse becomes weaker. It then causes the response of amplifier to be slow due to the light signal attenuation. This characteristic of the conventional TOF measurement circuits makes the high precision TOF measurement difficult especially if a sensor requires a wide dynamic range of the light source which needs for a long range measurement. capacitance of the n-th stage, and Gn is the gain of the n-th stage. The final stage output can be written as 1 (4) Vo ( N ) =GN ⋅ GN −1 ⋅ GN − 2 G2 I ph dt Cf1 ∫ Equation (4) means that the multiple-stage amplification has very high total gain and multiple wide-range gains. For measuring the TOF, the output of each stage amplifier is connected to a comparator. When a light pulse is received and signal charge by the light pulse comes into frontend charge amplifier, measured times related to the TOF can be obtained in comparator outputs that respond to the light pulse. The number of comparator outputs that respond to the light pulse depends on the intensity of the light. The n-th comparator output XC(n) to measure the TOF is given by 0 (if Vo (n) < VTH ) (5) X C ( n) = 1 (if Vo (n) ≥ VTH ) where VTH is the threshold voltage given at the comparator. The comparator output is used for gating in a counter to measure the TOF. Fig. 3. The cascaded amplification circuit consists of the multi-stages cascaded connection of amplifiers B. Proposal Method Using a Multiple-Stage Amplifier Figure 3 shows the proposed cascaded multiple-stage amplifier suitable for an accurate TOF measurement with wide working range. Figure 4 shows the model of a TOF measurement circuit by use of the multi-stages amplification. The frontend stage is a charge amplifier for converting photo signal charge into a voltage. The output voltage of the frontend charge amplifier is given by Vo (1) = 1 I ph dt Cf1 ∫ (2) where Cf1 is the feedback capacitance of the charge amplifier, and Iph is the photo current of input signal. The amplifiers in the second and the successive stages are implemented by non-inverting capacitive-feedback amplifiers. The output of each stage is plugged into each non-inverting input terminal of the next stage. Using this multiple-stage amplification, the total gains at the latter stages become very large. Hence it is possible to detect a quite small amount of light signal by the use the cascaded multiple-stage amplifier circuit. Since the second-stage and successive stages consist of a non-inverting amplifier using a capacitive feedback circuit, the gain of each stage is determined by a ratio of a feedback capacitor to a grounded capacitor in each stage. The output voltage of the n-th stage is given by C f , n + Ci , n (3) − 1) GnVo ( N − 1) V= Vo (n= o ( n) C f ,n where Cf,n and Ci,n are the feedback and input grounded Fig. 4. The model of a TOF measurement circuit by use of the multi-stages amplification. Fig. 5. Amplifiers for TOF measurement circuit.VDD is 2.5V and ISS is20µA. H. Ogawa et al. / Journal of Advanced Research in Physics 3(1), 011204 (2012) C. Circuit Simulations The behavior of the cascaded multiple-stage amplifier is simulated by a circuit simulator SPECTRE. In the circuit simulation, device parameters of a 0.25µm standard CMOS process technology are used. Figure 5 shows amplifier circuit which is used in the TOF measurement circuit of Fig. 3. The feedback capacitance and the input grounded capacitance of each stage are set to be 0.1pF and 0.9pF respectively. The resulting gain of all the stage (1 + Ci,n/Cf,n) is set to be 10. Figure 6 shows the simulation results for the delay times of the 6 amplifier outputs as a function of photocurrent at the receiver. In this simulation, the delay times at the outputs of the 6-stage amplifier are measured for the signal current intensity range from 10nA to 10mA. The pulse width of the input photocurrent is set to be 10n second. In the range from 10nA to 10mA, the delay times of all the stages are measured at 30 points of intensity level. For better measurement accuracy and stability, the delay time of the amplifier should be as small as possible. In high photocurrent level, the output of earlier stages has smaller delay time. In small photocurrent level, the output of earlier stages has large delay and may fail to detect the signal at the comparator because the amplitude does not reach to the measurement threshold. On the other hand, the output of latter stages which has a large gain has smaller delay time in small photo current region and can cover down to very small photocurrent level of 10nA. The results of Fig. 6 suggests that the delay time which includes the TOF of light pulse can be measured in wide dynamic range by selecting proper outputs of the 6-stage amplifier. This is why the TOF range finder using the multiple-stage amplifier enables to expand the dynamic range. One can notice in the results of Fig. 6 that the delay time variation of the 6-stage amplifier becomes gradually small when the amount of photocurrent signal is larger than approximately 30µA, and it is almost unchanged when a photocurrent signal exceeds 1mA. The multiple outputs can be used for estimating the delay time of the TOF measurement circuits including the frontend charge amplifier, multiple-stage amplifier, and comparators as described in the next section. III. TOF ESTIMATION USING MULTIPLE-STAGE AMPLIFIER OUTPUTS A. Estimation of Delay Time of Measurement Circuits As explained in the previous section, the TOF measurement circuit using the multiple-stage amplifier enables to obtain multiple time signals which include the TOF of light pulse and the delay time of the measurement circuits themselves. The measured total delay time of the nth stage output Tm(n) is given by, (6) Tm = (n) TTOF + Td (n) where TTOF is the time of flight of the light pulse between a target and the TOF range finder, and Td(n) is the delay time at the n-th stage output of the measurement circuits. Obviously, the measured total delay time of the (n-1)-th stage output Tm(n-1) is given by, (7) Tm (n − 1)= TTOF + Td (n − 1) By taking the difference between (6) and (7), we have 3 Tm (n − 1) − Tm (n= ) Td (n − 1) − Td (n) (8) ≡ ∆Td (n) Equation (8) means that the difference of delay time of the two amplifier outputs is independent of the TOF. Figure 7 shows Tm(n-1)-Tm(n) as a function of photocurrent. Using the result of Fig. 7, the relationship between ∆Td(n) and the photocurrent is uniquely pre-determined, and it is expressed as a function of photocurrent, i.e., (9) ∆Td (n) = f ∆ , n ( I ph ) Using ∆Tm(n) =Tm(n-1)-Tm(n), the amount of photocurrent can be expressed as (10) I ph =f ∆−,1n (∆Td (n)) =f ∆−,1n (∆Tm (n)) where f ∆−,n1 is the inverse function of f ∆ ,n . Td(n) can also be expressed as a function of photocurrent as follows: Td (n) = f n ( I ph ) (11) Obviously, f= f n −1 ( I ph ) − f n ( I ph ) . ∆ , n ( I ph ) (12) Using (6), (10) and (11), the TOF can be expressed as = TTOF Tm (n) − Td (n) = Tm (n) − f n ( f ∆−,1n (∆Tm (n)) (13) Equation (13) suggests that the TOF can be estimated using the measured Tm(n) and Tm(n-1) and pre-determined relationship between (Tm(n), Tm(n-1)) and photocurrent. B. Improvement of Accuracy Using Multiple Outputs Depending on the photocurrent level, multiple amplifier outputs more than two can be used for calculating the TOF with (13) and the measurement error can be reduced by averaging multiple calculated TOFs. Denoting the calculated TOF using the n-th and (n-1)-th amplifier outputs TTOF(n), the averaged TOF can be expressed as TTOF = 1 N ∑ TTOF (n) N − 1 n=2 (14) if first through n-th amplifier outputs are available for the TOF calculations. C. Simulations for Range Finding Simulations to demonstrate that an accurate TOF-based range measurement is possible are shown in Fig. 8. The target range to be measured is varied from 0.2m to 200m. The TOF and intensity of light pulse are varied based on a model that the light intensity is inversely proportional to the square of target range. In this way, the maximum photocurrent is set to be 10mA at the range of 0.2m. As shown in Fig. 8(a), the range can be accurately measured. The measurement error given by the difference of the ideal range from the measured range is shown in Fig. 8(b). The maximum measurement error is within 0.5cm for the target range from 0.2m to 200m. 4 H. Ogawa et al. / Journal of Advanced Research in Physics 3(1), 011204 (2012) IV. CONCLUSIONS Fig. 6. Delay Times of the 6-stage amplification circuit in regard to intensity of the input photocurrent. In this paper, a new TOF range finding method using a multiple-stage amplifier has been presented. The multiple outputs for the TOF measurement are used for calculating the signal-dependent delay time of the circuit and automatically correcting the measurement error due to the circuit delay. Circuit simulation results have demonstrated that a TOF range finder by using the proposed method is effective for an accurate range measurement in a very wide dynamic range of optical signals and the resulting wide working range. A demonstration using a prototype chip of the TOF measurement circuit with the multiple stage amplifiers is left as a near-future subject. REFERENCES [1] [2] [3] Fig. 7. Delay Time Difference between 6-stage amplification circuit and others. (a) (b) Fig. 8. Simulations for range measurements (a). Measured Range of Ideal and Simulated. (b). Measurement Error. [4] Mark D. McNeill, Lawrence Williams and HuaMeng Chu, “Design of a time-of-flight range-finder”, 29th ASEE/IEEE Frontiers in Education Conference, 3, 1999. Shahram Mohammad Nejad and Saeed Olyaee “Low-Noise HighAccuracy TOF Laser Range Finder”, American Journal of Applied Sciences, 5(7), 2008, pp. 755-762. Shigenobu Shinohara, Hirofumi Yoshida, Hiroaki Ikeda, Ken-Ichi Nishide and Masao Sumi “Compact and High-Precision Range Finder With Wide Dynamic Range And Its Application” IEEE Transaction on Instrumentation and Measurement, 41(1), 1992, pp. 40-44. Françis Blais, “Review of 20 years of range sensor development” Journal of Electric Imaging, 13(1), 2004, pp. 231-240.