Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
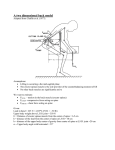
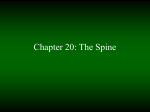
UNIT 3 – BIOMECHANICS OF THE UPPER LIMB AND SPINE Dr M J Dolan Department of Orthopaedic & Trauma Surgery University of Dundee Dr T Drew Department of Orthopaedic & Trauma Surgery University of Dundee SECOND EDITION Edited by Dr T Drew Department of Orthopaedic & Trauma Surgery University of Dundee Illustrations by Mr I Christie Published by Distance Learning Section Department of Orthopaedic & Trauma Surgery University of Dundee Second Edition published 2005: ISBN 1-903562-48-1 ISBN 978-1-903562-48-2 First Edition published 1994: ISBN 1-899476-51-2 Copyright © 2005 University of Dundee. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, and recording or otherwise, without prior permission from the publisher. The University of Dundee is a Scottish Registered Charity, No SC01509. UNIT 3 - BIOMECHANICS OF THE UPPER LIMB AND SPINE CONTENTS 1. THE SHOULDER 1.1 Glenohumeral Joint 1.2 Acromioclavicular Joint 1.3 Sternoclavicular Joint 1.4 Scapulothoracic Articulation 1.5 Range of Motion 1.6 Dislocations of the Shoulder 2. THE ELBOW 2.1 Flexion and Extension 2.2 Pronation and Supination 2.3 Range of Motion During Daily Activities 2.4 Stability 2.5 Joint Forces at the Elbow 3. THE WRIST 3.1 Articulations 3.2 Motion 4. THE HAND 4.1 Articulations 4.2 Motion and Range of Motion of the Fingers 4.3 Motion and Range of Motion of the Thumb 4.4 Interaction of the Hand and Wrist Motion 5. THE SPINE 5.1 Vertebrae 5.2 Intervertebral Discs 5.3 The Cervical Spine 5.4 The Thoracic Spine 5.5 The Lumbar Spine 5.6 The Sacrum and Coccyx 5.7 Range of Motion 5.8 Loadings on the Spine SUMMARY SAQ ANSWERS END OF UNIT EXERCISE UNIT 3 - BIOMECHANICS OF THE UPPER LIMB AND SPINE OBJECTIVES On completing your study of this unit you should be able to: 1. Describe the structure of the major upper limb joints. 2. Name the four shoulder joint articulations. 3. Explain the function of the rotator cuff. 4. Describe the motion and range of motion of the shoulder joint. 5. Explain how an anterior dislocation of the glenohumeral articulation may occur. 6. Name the three elbow joint articulations. 7. Describe the motion and range of motion of the elbow joint. 8. Describe the function of the annular ligament. 9. Discuss the joint forces at the elbow. 10. Explain the function of the pisiform bone. 11. Describe the motion and range of motion of the wrist. 12. List the principal joints of the hand. 13. Describe the motion of the carpometacarpal joint of the thumb. 14. Describe the motion and the range of motion of the fingers and thumb. 15. Discuss the importance of the motion of the thumb. 16. Discuss the interaction of the motion of the hand and wrist. 17. Describe the anatomy and function of the vertebrae and the interarticular discs. 18. Discuss the differences and similarities between the anatomy and function of different regions of the spine. 19. Describe and discuss the motion and range of motion of the spine. 20. Explain how the loadings on the spine vary with the positioning of the trunk. UNIT 3 - BIOMECHANICS OF THE UPPER LIMB & SPINE INTRODUCTION In this unit we will be looking at the major joints of the upper limb and the spine. In particular, we will be examining the structure and function of the joints and their stability, range of motion and loadings. The upper limb consists of five parts - the shoulder girdle, the arm, the forearm, the wrist and the hand (Figure 1). The shoulder girdle is formed by the clavicle and scapula, the arm (upper arm) by the humerus, the forearm by the ulna and radius, the wrist by the eight carpal bones and the hand by the metacarpals and phalanges. Three major joints give the upper limb its wide range of motion. They are the shoulder, elbow and wrist joints. The major function of the upper limb is to position the hand in space and it is therefore designed to achieve a wide range of movement rather than for weight bearing. shoulder girdle arm spine (vertebral column) forearm wrist hand FIGURE 1. THE UPPER LIMB AND SPINE. The spine, or vertebral column, is made up of twenty-four vertebrae and the sacrum and the coccyx. Its segmented structure gives it a remarkable amount of flexibility as well as the strength required to support the upper body. 1. THE SHOULDER The shoulder joint is the most intricate joint complex in the human body. It is formed by the humerus, the shoulder girdle and the thorax and contains four distinct articulations. Three of these articulations, the glenohumeral, the acromioclavicular and the sternoclavicular, are synovial while the fourth, the scapulothoracic, is a boneon-muscle-on-bone articulation (Figure 2). Unit 3 - Biomechanics of the Upper Limb & Spine 1 clavicle acromioclavicular articulation acromion process sternum scapula glenohumeral articulation sternoclavicular articulation humerus scapulothoracic articulation FIGURE 2. THE SHOULDER JOINT. 1.1 Glenohumeral Joint The glenohumeral joint is a ball-and-socket shaped synovial joint formed by the humeral head and the glenoid fossa of the scapula (Figure 3). The glenoid fossa is particularly shallow allowing for a wide range of motion. However, this means that the articulation is less stable than it would be with a more developed socket. Dislocations of the glenohumeral articulation are therefore not infrequent. To assist stability it has a thick cartilaginous rim called the glenoid labrum (Figures 3 and 5). The articulation is surrounded by a capsule and, more importantly, by the rotator cuff. synovial cavity humeral head articular cartilage glenoid labrum humerus FIGURE 3. THE GLENOHUMERAL JOINT. The rotator cuff is formed by a group of four muscles and their tendons: subscapularis, infraspinatus, supraspinatus and teres minor (Figure 4A). They form a cuff of tissue, like the fingers of a hand cupping a ball, around the glenohumeral articulation. They provide dynamic restraints to anterior, posterior and inferior displacement. This is illustrated in Figure 4(B). The rotator cuff pushes on the humeral head, preventing any anterior-posterior movement, thereby stabilising the joint. Unit 3 - Biomechanics of the Upper Limb & Spine 2 GLENOHUMERAL JOINT HUMERAL HEAD GLENOID FOSSA GLENOID LABRUM supraspinatus posterior (B) (A) subscapularis humeral head infraspinatus anterior teres minor FIGURE 4. (A) LATERAL VIEW OF THE LEFT SCAPULA SHOWING THE MUSCLES THAT FORM THE ROTATOR CUFF (B) SUPERIOR VIEW OF THE LEFT GLENOHUMERAL JOINT SHOWING HOW THE ROTATOR CUFF MUSCLES STABILISE THE JOINT. SAQ 1 (a) List the four articulations of the shoulder joint. (b) Name the shallow depression in which the humeral head rests. 1.2 Acromioclavicular Joint The acromioclavicular joint is a small synovial joint formed by the proximal acromion of the scapula and the distal clavicle. It is stabilised by superior and inferior acromioclavicular ligaments which prevent the joint being pulled apart. Further stability is provided by the two parts of the coracoclavicular ligament between the clavicle and coracoid process of the scapula which limit the upward movement of the clavicle. The range of motion of the joint is restricted by the thorax and the muscle attachments, being limited to a few degrees during arm abduction. clavicle coracoclavicular ligament acromioclavicular joint coracoacromial ligament coracoid process glenoid fossa ACROMIOCLAVICULAR JOINT acromion process glenoid labrum capsule FIGURE 5. THE ACROMIOCLAVICULAR JOINT. 1.3 Sternoclavicular Joint The sternoclavicular joint is small synovial joint between the manubrium of the sternum and the proximal clavicle (Figure 6A). It is the only bony joint connecting the shoulder girdle to the trunk. During arm elevation the clavicle also elevates at the sternoclavicular joint. For the first 90 degrees of arm elevation the clavicle elevates by around 4 degrees for every 10 degrees of arm elevation. Beyond 90 degrees of arm Unit 3 - Biomechanics of the Upper Limb & Spine 3 STERNOCLAVICULAR JOINT elevation the elevation of the clavicle is almost negligible. During elevation and depression the clavicle rotates about an axis determined by the attachment of the costoclavicular ligament (Figure 6B). anterior sternoclavicular ligament interclavicular ligament clavicle (A) first rib manubrium costoclavicular ligament articular disc motion of clavicle articular disc manubrium (B) centre of rotation sternum body FIGURE 6. (A) THE LIGAMENTS OF THE STERNOCLAVICULAR JOINT (B) MOTION OF THE CLAVICLE DURING ELEVATION AND DEPRESSION. Activity: Place your left hand flat on your chest so that your index finger is aligned along your right clavicle. Start with your right arm by your side and slowly raise your arm, keeping your index finger fixed. Note the motion of the clavicle. 1.4 Scapulothoracic Articulation The scapulothoracic articulation is the bone-muscle-bone articulation between the scapula and the posterior thoracic wall. It is not a joint in the truest sense since there are no direct bony or ligamentous connections between the scapula and thorax. However, it contributes significantly to the wide range of motion of the scapula, which greatly enhances the mobility of the entire shoulder complex. The broad anterior surface of the scapula is separated from the posterior thorax by two broad flat muscles: the serratus anterior and subscapularis muscles. The serratus anterior originates on the upper eight or nine ribs and inserts on the anterior surface of the scapula along its vertebral border. It helps to hold the scapula against the thorax, thus preventing “winging”, and is a strong abductor that is useful in pulling or pushing movements. The subscapularis originates from the subscapular fossa and inserts on the lesser tubercle of the humerus. It is one of the rotator cuff muscles and acts to medially rotate the humerus. SAQ 2 (a) Name the ligament about whose attachment the clavicle rotates during elevation and depression. (b) Why is the scapulothoracic articulation not a joint in the truest sense? Unit 3 - Biomechanics of the Upper Limb & Spine 4 SCAPULOTHORACIC ARTICULATION SERRATUS ANTERIOR SUBSCAPULARIS 1.5 Range of Motion All four articulations of the shoulder joint act together to provide the wide range of motion commonly found in the shoulder. Shoulder elevation is the term used to describe the movement of the humerus away from the side of the thorax in any plane. Similarly shoulder depression is the term used to describe the movement of the humerus towards the side of the thorax (Figure 7A). (A) SHOULDER ELEVATION SHOULDER DEPRESSION (B) elevation depression angle of elevation FIGURE 7. SHOULDER ELEVATION AND DEPRESSION. The amount of elevation is quantified as the angle of elevation. This is the angle between the axis passing through the shoulder joint centre parallel to the longitudinal axis of the trunk and the longitudinal axis of the humerus (Figure 7B). With a subject in the anatomical position the longitudinal axis of the thorax will correspond to the vertical. For example, for a subject in the anatomical position, with their arm against the side of their trunk, the shoulder elevation angle will be zero degrees. With their arm held out so that it is horizontal, the shoulder elevation angle will be 90 degrees. When the arm is moved towards the trunk from an elevated position it is described as shoulder depression. In the sagittal plane, shoulder elevation is termed forward flexion when the arm moves forward and backward extension or backward elevation when the arm moves backwards (Figure 8). (A) FORWARD FLEXION BACKWARD EXTENSION (B) FIGURE 8. (A) FORWARD FLEXION (B) BACKWARD EXTENSION. In the coronal (frontal) plane, shoulder elevation is called abduction when the arm moves away from the trunk and adduction as it moves towards the trunk. True adduction in the coronal plane is limited by the trunk. However, adduction can be Unit 3 - Biomechanics of the Upper Limb & Spine 5 ABDUCTION ADDUCTION achieved with slight forward flexion to adduct the arm in front of the trunk or with slight backward extension to adduct the arm behind the trunk (Figure 9). (A) abduction (B) adduction FIGURE 9. (A) ABDUCTION (B) ADDUCTION. The normal range of forward flexion and abduction is about 180 degrees. The normal range of backward extension is about 60 degrees. With the arm moving in front of the trunk the range of adduction possible is around 75 degrees. Note that all these ranges decrease with age, especially in the physically inactive. Note: Some authors use the terms elevation and depression interchangeably with abduction and adduction. Another functionally important motion is the rotation about the longitudinal axis of the humerus. This rotation is described as either internal or external rotation. The definitions of these are most easily described using typical examples. Consider a subject standing in the position shown in Figure 10A with their elbow flexed at 90°. Internal rotation moves the forearm closer to the trunk and external rotation moves the forearm away from the trunk. Now consider a subject with their arm elevated as shown in Figure 10B. Internal rotation moves the hand downwards and external rotation moves the hand upwards. The range of internal and external rotation varies with the amount of shoulder elevation, but in general each may be realised to about 90 degrees, giving a total range of 180 degrees. (A) internal rotation external rotation (B) external rotation internal rotation FIGURE 10. INTERNAL - EXTERNAL ROTATION (A) WITH UPPER ARM AT SIDE OF BODY (B) WITH UPPER ARM ABDUCTED 90 DEGREES. Unit 3 - Biomechanics of the Upper Limb & Spine 6 INTERNAL/EXTERNAL ROTATION Motion in the transverse (horizontal) plane is termed horizontal flexion and horizontal extension. Horizontal flexion is the forward motion of the arm (Figure 11A) and horizontal extension is the backward motion of the arm (Figure 11B). Starting from a position of 90 degrees of abduction (that is with the upper arm parallel with the ground) the normal range of horizontal flexion and extension is about 135 degrees and 45 degrees respectively. (A) HORIZONTAL FLEXION HORIZONTAL EXTENSION (B) horizontal extension horizontal flexion FIGURE 11. (A) HORIZONTAL FLEXION (B) HORIZONTAL EXTENSION. SAQ 3 - Complete the following table of average ranges of shoulder joint motion. Forward flexion-backward extension Abduction-adduction Forward flexion 180° Backward extension 60° Range 240° Abduction Adduction Range Internal-external rotation Internal rotation External rotation Range Horizontal flexion-extension Horizontal flexion Horizontal extension Range Activity: Try for yourself the various motions of the shoulder joint described and estimate your own range of motion. How do these compare to the average ranges in the table above? 1.6 Dislocations of the Shoulder All three of the synovial articulations of the shoulder joint are prone to dislocation. The most common dislocation is the anterior dislocation of the glenohumeral articulation. This is when the head of the humerus slips forward off the shallow glenoid fossa. Generally, this may occur if the arm suffers a heavy blow when the shoulder is abducted and extended horizontally. In this position the arm pivots about the acromion and the ligaments and muscles act to prevent the humeral head slipping Unit 3 - Biomechanics of the Upper Limb & Spine 7 ANTERIOR DISLOCATION GLENOHUMERAL ARTICULATION forward. If the blow is too heavy or the ligamental muscles too weak then a dislocation occurs. In this way the arm and shoulder are functioning as a first class lever in the same manner as a crowbar (Figure 12). force fulcrum at the acromion resistance force FIGURE 12. ANTERIOR DISLOCATION OF THE GLENOHUMERAL ARTICULATION MAY OCCUR IF A FORCE IS APPLIED TO THE ARM IN THE POSITION SHOWN. With the arm fully extended the effort force is working a very large mechanical advantage over the resistance force enabling even a comparatively small external force to cause a dislocation. This can of course be likened to the action of a crowbar. For example, if the distance from the acromion to the point of application of the external force (dF) is 50 cm and the distance from the acromion to the point of application of the resultant of all the resistant force (dR) is 5.0 cm, then the mechanical advantage (MA) can be calculated as follows: MA = dF 50 = = 10 d R 5.0 Thus, in this case the mechanical advantage is 10, and the magnitude of the resistance force must be ten times that of the applied force. SAQ 4 - If in the above examination of the mechanics of anterior dislocation of the glenohumeral articulation, the magnitude of the applied force was 100 N, what must the magnitude of the resistance force be if it is to prevent a dislocation? 2. THE ELBOW The elbow joint is formed by the distal surface of the humerus and the proximal articular surfaces of the forearm bones, the radius and ulna. It consists of three synovial articulations: the humeroradial articulation, the humeroulnar articulation and the proximal radioulnar articulation (Figure 13). Unit 3 - Biomechanics of the Upper Limb & Spine 8 ELBOW JOINT (A) humerus trochlea capitellum humeroradial articulation proximal radioulnar articulation humeroulnar articulation radius ulna humerus (B) humeroulnar articulation ulna olecranon trochlea fossa FIGURE 13. THE ARTICULATIONS OF THE ELBOW JOINT (A) FRONTAL ASPECT (B) MEDIAL ASPECT. The humeroradial articulation is formed by the articulation between the capitellum of the distal humerus and the head of the radius. HUMERORADIAL ARTICULATION The humeroulnar articulation is the articulation between the trochlea of the distal humerus and the reciprocally shaped trochlear fossa of the proximal ulna. HUMEROULNAR ARTICULATION The proximal radioulnar articulation is formed by the head of the radius and the radial notch of the proximal ulna. PROXIMAL RADIOULNAR ARTICULATION Here the functional motion of the elbow joint is of primary interest. The detailed motion of each articulation is not of great importance and will therefore not be discussed. Rather the overall motion resulting from the individual articulations will be described in thee next two subsections. 2.1 Flexion and Extension The two articulations that include the humerus, the humeroradial and humeroulnar articulations, allow the elbow joint to flex and extend in a hinge-like manner (Figure 14). The axis of rotation passes through the middle of the trochlea and is roughly parallel to the line joining the lateral and medial epicondyles of the humerus. flexion axis of rotation extension FIGURE 14. FLEXION AND EXTENSION OF THE ELBOW. Unit 3 - Biomechanics of the Upper Limb & Spine 9 The range of flexion-extension motion is around 140 degrees. When the elbow is fully flexed the angle between the humerus and forearm is around 40 degrees and when it is fully extended it is around 180 degrees giving a total range of motion of about 140 degrees made up of around 140 degrees of flexion and 0 degrees of extension (Figure 15). full flexion 140° 180° 40° full extension FIGURE 15. RANGE OF FLEXION - EXTENSION MOTION OF THE ELBOW. 2.2 Pronation and Supination The proximal radioulnar articulation allows rotation of the forearm about a longitudinal axis. This rotation is termed pronation and supination (Figure 16). In pronation, the palm of the hand faces posteriorly if the elbow is extended with the upper arm alongside the trunk and downwards if the elbow is flexed 90 degrees. PRONATION SUPINATION supination pronation FIGURE 16. SUPINATION AND PRONATION. Pronation and supination are achieved by the rotation of the head of the radius in the radial notch of the ulna in a pivot-like manner (Figure 17A). This occurs inside the ligamentous sling which binds the radius to the ulna, the annular ligament (Figure 17B). The longitudinal axis passes through the radial head and the distal ulna articular surface. The rotation about this axis results in the migration of the distal end of the radius around the distal end of the ulna. Unit 3 - Biomechanics of the Upper Limb & Spine 10 ANNULAR LIGAMENT humerus annular ligament radius ulna radial collateral ligament (A) (B) FIGURE 17. RADIOULNAR ARTICULATION. (A) THE PIVOT-LIKE STRUCTURE (B) THE POSITION OF THE ANNULAR LIGAMENT. Activity: Place your forearm on a table with your palm facing upwards. Pronate your forearm whilst keeping it on a table. Note how the radius moves around the almost stationary ulna. If at the same time you feel the head of the radius (just distal to the lateral epicondyle of the humerus) you will be able to feel the radius as it rotates and rolls against the ulna. The total range of pronation-supination is around 150 degrees. This is made up of around 70 degrees of pronation and 80 degrees supination. SAQ 5 - Complete the following table of the maximum ranges of motion of the elbow. Flexion-extension Extension Flexion Pronation-supination Pronation Supination Range Range 2.3 Range of Motion During Daily Activities The range of elbow joint motion required for various selected daily activities are summarised in Table 1. Note that for these activities the required ranges are much less than that which the elbow can achieve. Around 100 degrees of flexion motion is required from 30 to 130 degrees and around 100 degrees of pronation and supination motion is required from around 50 degrees pronation and 50 degrees supination. Activity Flexion (degrees) Rotation (degrees) minimum maximum arc pronation supination arc Pouring from a jug 36 58 22 43 22 65 Putting fork to mouth 85 128 43 10 52 62 Opening a door 24 57 33 35 23 58 Putting glass to mouth 45 130 85 10 13 23 TABLE 1. THE RANGE OF ELBOW JOINT MOTION REQUIRED FOR VARIOUS DAILY ACTIVITIES. 2.4 Stability The elbow is essentially a mechanically stable joint with the bony structure and its associated ligaments and muscles all contributing to this stability. The olecranon process, which in profile resembles the end of a spanner, is particularly well suited to resist forces in the anteroposterior and posteroanterior directions, as it holds the trochlea like a nut (Figure 13B). However, it does not provide much resistance to forces acting in a lateral and medial direction. Unit 3 - Biomechanics of the Upper Limb & Spine 11 The side to side stability is instead provided by the two collateral ligaments. The ulnar or medial collateral ligament is the most important, preventing abduction of the elbow. In contrast, the radial or lateral collateral ligament provides only limited resistance to adduction forces. The lateral collateral ligament is assisted by the anconeus muscle which is located on the lateral aspect of the elbow. The anconeus muscle has its origin on the lateral epicondyle of the humerus and its insertion on the olecranon and superior portion of the ulna shaft. This apparent weakness does not pose a significant problem because valgus stability is much more important functionally than varus stability. This is easily appreciated if you consider the forces acting during a throwing or hammering action or a fall on an outstretched arm. The stability of the elbow joint means that dislocations are much less common than dislocations of the shoulder. However, a fall on a outstretched arm in almost full extension can result in an anterior dislocation, whereby the distal end of the humerus slides forward over the coronoid process. SAQ 6 - By sketching a diagram of the arm decide which ligament will prevent an elbow dislocating in a fall to the side with the arm straight so that it breaks the fall. 2.5 Joint Forces at the Elbow During common daily activities the elbow joint force can be as high as 2000 N which is almost 2.5 to 3 times body weight. For example, the action of pulling an object, such as a table, can generate a joint force of about 1900 N, and during dressing and eating activities these can be around 300 N. Worked Example In this worked example the flexor muscle force and the elbow joint force will be calculated for the situation shown in Figure 18. The subject had a total body mass of 85 kg and the length of his forearm from the elbow axis to the ulna styloid was measured and found to be 27.5 cm. The distance from the elbow axis to the position of the dumbbell was also measured and was found to be 35 cm. The mass of the dumbbell was 5.0 kg. The problem has been simplified by considering only the forces acting in the sagittal plane and by grouping the actions of all the elbow flexors in to one force acting vertically upwards with a lever arm about the elbow joint of 25 mm (remember that g = 9.8 m s-2). muscle force 2.5 cm 27.5 cm 35 cm FIGURE 18. Unit 3 - Biomechanics of the Upper Limb & Spine 12 The first step in solving any biomechanical problem is to draw a free body diagram (as shown in Figure 19). Note that the elbow joint force, FELBOW, is drawn as acting vertically downwards. The direction was deduced by considering the other forces. None of the other forces have a horizontal component, therefore the elbow joint force can not have a horizontal component - if it did the forearm would be accelerating! The direction upwards or downwards was deduced by considering the moments about the insertion of the muscle force. Both weights would cause a clockwise moment. The elbow joint force must counteract this with an anticlockwise moment. It must therefore be acting downwards. FM FELBOW IM ICOM mFHg ID m Dg FIGURE 19. FREE BODY DIAGRAM OF FOREARM. SAQ 7 - Could the problem be solved without first deducing the direction of the elbow joint force? The mass of the forearm and hand, mFH, and the distance from the elbow joint to the centre of mass, lCOM, are unknown but can both be calculated using the anthropometric data contained in Table 1 of Unit 1 - Biomechanical Analysis. Thus, for the mass of the forearm and hand: mFH = 0.022 × 85 = 1.87 kg For the distance: lCOM = 0.682 × 27.5 = 18.755 cm = 0.18755 m To calculate the flexor muscle force we need to eliminate the other unknown, the elbow joint force. This is achieved by summing the moments about elbow joint. Since the arm is in static equilibrium the sum of all the moments should be zero. Thus, taking anticlockwise as positive: ∑M ELBOW = FMlM – mFHglCOM – mDglD = 0 Rearranging for FM: FM = m FH gl COM + m D gl D 1.87 × 9.8 × 0.18755 + 5.0 × 9.8 × 0.35 = lM 0.025 FM = 3.4370413 + 17.15 = 823.482 = 820 N 0.025 Thus the flexor muscle force is 820 N. To calculate the elbow joint force, two methods can be employed. Either the vertical forces can be summed or the moments about any point other than the elbow joint can be summed. Unit 3 - Biomechanics of the Upper Limb & Spine 13 Summing the vertical forces (upwards positive): ∑F VERTICAL = -FELBOW + FM – mFHg – mDg = 0 FELBOW = FM – mFHg – mdg = 823.482 – 1.87 × 9.8 – 5 × 9.8 = 756.156 = 760 N Alternatively, summing the moments about the point of application of FM: ∑M FM = FElM – mFHg(lCOM – lM) – mDg(lD – lM) = 0 Rearranging for FE: FELBOW = m FH g(l COM − l M ) + m D g(l D − l M ) lM FELBOW = 1.87 × 9.8 × (0.18755 − 0.025) + 5 × 9.8 × (0.35 − 0.025) 0.025 FELBOW = 2.9788913 + 15.925 = 756.156 = 760 N 0.025 Thus the joint force is equal to 760 N and the flexor muscle force is equal to 820 N. SAQ 8 (a) Express the flexor muscle force and the elbow joint force found in the worked example as ratios of the subject’s total body weight. (b) Comment on the effect on the joint force if the flexor muscle joint force was not acting vertically. 3. THE WRIST The wrist joint is a complex structure that allows the hand to move relative to the forearm and transmit loads between the forearm and hand. The wrist joint complex is formed by the distal radius, the structures within the ulnocarpal space, the carpal bones and proximal ends of the metacarpals (Figure 20). capitate trapezoid five metacarpals trapezium hamate pisiform triquetrum eight carpal bones lunate ulnocarpal space ulna scaphoid radius FIGURE 20. ANTERIOR VIEW OF THE BONES OF THE WRIST. Unit 3 - Biomechanics of the Upper Limb & Spine 14 Seven of the eight carpal bones are arranged into two rows. The proximal row is made up of three bones: PROXIMAL ROW ¾ triquetrum ¾ lunate ¾ scaphoid The distal row is made up of four bones: DISTAL ROW ¾ hamate ¾ capitate ¾ trapezoid ¾ trapezium The eighth carpal bone, the pisiform, is positioned anteriorly to the triquetrum. The pisiform bone is the only one of the carpal bones that is easily palpated. It projects anteriorly on the little finger side of the hand as a small rounded elevation. It is the insertion point of the flexor carpi ulnaris muscle which flexes and adducts the wrist. The tendon of the flexor carpi ulnaris can also be easily palpated when the wrist is flexed. The arrangement of the pisiform and the flexor carpi ulnaris is comparable to the arrangement of the patella and the knee extensor muscles in that the pisiform increases the lever arm of the flexor carpi ulnaris. pisiform tendon of the flexor carpi ulnaris FIGURE 21. THE PISIFORM INCREASES THE LEVER ARM OF THE FLEXOR CARPI ULNARIS MUSCLE. Despite its wide range of motion the wrist is a comparatively stable joint. Its stability is derived from the intricate ligamentous structures and the precise opposition of the multifaceted articular surfaces rather than from any inherent bony stability, such as that found in the hip joint. SAQ 9 (a) List the bones that form the proximal and distal rows of the wrist. (b) How is the lever arm of the flexor carpi ulnaris muscle increased? 3.1 Articulations The motion of the wrist joint is dependent on the numerous articulations formed between the carpal bones and between the carpal bones and adjacent bones of the hand Unit 3 - Biomechanics of the Upper Limb & Spine 15 PISIFORM and forearm. These include the radiocarpal joint, the midcarpal joints, the carpometacarpal joints, and the intercarpal joints. Two of the most interesting articulations of the wrist are the radiocarpal joint and the articulation between the triquetrum and distal ulna. The lunate and scaphoid articulate with the distal end of the radius, forming the radiocarpal joint. It is a condyloid joint, whereby an oval-shaped condyle fits into an elliptical depression. It allows flexion and extension, abduction and adduction and circumduction (Figure 22). RADIOCARPAL JOINT CONDYLOID JOINT FIGURE 22. A CONDYLOID JOINT. The triquetrum articulates with the distal ulna via a triangular shaped inter-articular disc which occupies the ulnocarpal space. This is attached at its apex to the styloid process of the ulna and at its base to the ulnar notch of the radius (Figure 23). radius ulna styloid process articular cartilage FIGURE 23. END ON VIEW OF THE DISTAL FOREARM SHOWING THE ARTICULAR CARTILAGE IN THE ULNOCARPAL SPACE. 3.2 Motion The overall motion of the wrist is a result of the complex interaction of the bones and ligaments that form the joint. These interactions are as yet still not understood completely so here we will be concentrating on examining the gross functional motion of the wrist. The wrist allows flexion and extension, and abduction and adduction (Figure 24). When in the anatomical position: ¾ flexion results in the hand tilting forwards ¾ extension results in the hand tilting backwards Unit 3 - Biomechanics of the Upper Limb & Spine 16 ULNOCARPAL SPACE ¾ abduction results in the hand tilting outwards ¾ adduction results in the hand tilting inwards flexion extension abduction adduction FIGURE 24. THE MOTION OF THE WRIST. The wrist allows approximately 80 to 90 degrees of flexion and 70 to 80 degrees of extension. The range of flexion generally exceeds the range of extension by an average of 10 degrees. Approximately 60% of flexion occurs at the midcarpal joint and the rest, 40%, in the radiocarpal joint (Figure 25). The opposite is true for extension with around two thirds, 67%, of extension occurring in the radiocarpal joint and a third, 33%, at the midcarpal joint. However, these do vary widely between individuals. 26° 40% 40° 60% flexion extension 18° 37° 33.5% 66.5% FIGURE 25. THE CONTRIBUTIONS OF THE PROXIMAL AND DISTAL ARTICULATIONS TO THE OVERALL FLEXION EXTENSION MOTION OF THE WRIST. The wrist joint allows approximately 15 to 20 degrees of abduction and around 35 degrees of adduction giving a total range of motion of around 50 degrees. To perform most of the activities of daily living (such as eating, reading, using a telephone) a wrist joint with 10 degrees of flexion to 35 degrees of extension is generally satisfactory. The maximum range of extension is most critical and the ability Unit 3 - Biomechanics of the Upper Limb & Spine 17 to perform tasks is generally reduced as extension capability is lost. For immobilised wrist joints a fixed extension of around 15 degrees allows most activities of daily living to be performed quite satisfactory. SAQ 10 (a) What are the principal motions of the wrist joint? (b) At which articulation does most wrist extension occur? (c) What is the most functional position for an immobilised wrist joint? 4. THE HAND The hand is the most distal structure of the upper limb. It is formed by the metacarpals and the phalanges. In total there are five metacarpals (one at the base of each digit) and fourteen phalanges (three for each finger and two for the thumb). 3 phalanges 2 phalanges 5 metacarpals carpal bones FIGURE 26. THE BONES OF THE HAND AND WRIST. 4.1 Articulations The joints of the hand include the: ¾ carpometacarpal joints ¾ intermetacarpal joints ¾ metacarpophalangeal joints ¾ proximal interphalangeal joints ¾ distal interphalangeal joints The carpometacarpal (CMC) joints are formed by the carpal bones of the wrist and the metacarpals of the hand. The first carpometacarpal joint, the articulation between the trapezium and the first metacarpal, at the base of the thumb, is of great significance. It is the most freely moving carpometacarpal joint. It allows the thumb to oppose the fingers giving the human hand much greater dexterity than the forepaw of any other animal and allows us to manipulate our environment so effectively. It is a saddle joint, with the articulating surfaces resembling reciprocally shaped saddles, which allows the first metacarpal to flex and extend, and abduct and adduct. The remaining carpometacarpal joints are essentially modified saddle joints. All the carpometacarpal joints are surrounded by joint capsules which are reinforced by several ligaments. Unit 3 - Biomechanics of the Upper Limb & Spine 18 CARPOMETACARPAL JOINT second metacarpal first metacarpal trapezium trapezium FIGURE 27. THE CARPOMETACARPAL JOINT OF THE THUMB FUNCTIONS AS A SADDLE JOINT. The intermetacarpal joints are irregular articulations formed between the proximal ends of adjacent metacarpals. They share the joint capsules of the carpometacarpal joints. The metacarpophalangeal (MCP) joints are condyloid joints formed by the rounded distal heads of the metacarpals and the concave proximal ends of the phalanges. These joints form the knuckles of the hand. Each joint is enclosed in a capsule and stabilised by strong collateral ligaments. The metacarpophalangeal joint of the thumb is strengthened by an additional dorsal ligament. The proximal interphalangeal (PIP) and distal interphalangeal (DIP) are all essentially hinge joints allowing only flexion and extension motion. In contrast to the other digits the thumb has only one interphalangeal (IP) joint. 4.2 Motion and Range of Motion of the Fingers The range of motion of each of the carpometacarpal, metacarpophalangeal and interphalangeal joints of the fingers is dependent on their bone structure and the surrounding ligaments. The second and third metacarpals are basically immobile whilst the fourth and fifth metacarpals permit a small amount of flexion and extension. This is in the region of 10 to 15 degrees at the fourth and 20 to 30 degrees at the fifth. The metacarpophalangeal joints allow flexion-extension and abduction-adduction. The maximum amount of flexion is around 90 degrees. The amount of extension varies considerably between individuals depending on the laxity of their ligaments (Figure 28A). 0° neutral metacarpophalangeal joint (A) 0° neutral 90° proximal interphalangeal joint (B) 100° distal interphalangeal joint (C) 90° 0° neutral FIGURE 28. THE APPROXIMATE RANGE OF MOTIONS OF THE FINGER JOINTS. Unit 3 - Biomechanics of the Upper Limb & Spine 19 INTERPHALANGEAL JOINT The proximal and distal interphalangeal joints permit only flexion-extension. The largest amount of flexion occurs at the proximal joints. This is around 100 to 110 degrees (Figure 28B). At the distal joints the maximum amount of flexion is about 90 degrees (Figure 28C). Extension beyond the neutral position, with the fingers straight, is termed hyperextension. As with the MCP joints it is dependent largely on ligament laxity. SAQ 11 - How does the maximum amount of flexion at the metacarpophalangeal joint vary from finger to finger? 4.3 Motion and Range of Motion of the Thumb The metacarpophalangeal and interphalangeal joints of the thumb resemble those of the fingers in structure and function. The metacarpophalangeal joint, however, does not generally allow as large an amount of flexion as those of the fingers. The range varies from as little as 30 degrees to as much as 90 degrees. The amount of extension though is generally greater with normally around 15 degrees being possible. The carpometacarpal joint of the thumb is of particular importance functionally. The motion of the thumb in the plane of the palm is of particular interest. This is described as flexion as the thumb moves across the palm (Figure 29A) and extension as the thumb moves away to the side from the palm. Around 15 degrees of flexion and 20 degrees of extension is possible. Abduction occurs when the thumb moves away from the hand with around 60 degrees being possible. A small amount of rotation is also possible. For example, if the thumb is moved across the palm so that the tip touches the base of the little finger, this is achieved by the flexion and rotation of the carpometacarpal joint and flexion of the metacarpophalangeal and interphalangeal joints (Figure 29C). If the thumb is then moved to touch the tip of the little finger, adduction is required (Figure 29D). (A) (B) flexion 15° abduction 60° rotation flexion adduction (C) (D) FIGURE 29. MOTION OF THUMB. Unit 3 - Biomechanics of the Upper Limb & Spine 20 4.4 Interaction of the Hand and Wrist Motion The principal muscles that control the movements of the digits are actually located in the forearm. Their distal tendons cross the wrist and possibly several joints of the digits before they are inserted. For example, the flexor digitorum profundus originates from the anterior aspect of the ulna and has insertions on the distal phalanges, allowing it to flex the distal interphalangeal joints (Figure 30). flexor digitorum profundus FIGURE 30. FLEXOR DIGITORUM PROFUNDUS MUSCLE. As the wrist changes its position it also alters the functional lengths of the muscle tendons that cross it. For example, when the wrist is straight the fingers can be easily clenched into a tight fist, however, if the wrist is flexed first of all then it becomes difficult to fully flex the fingers. Similarly the range of wrist flexion is dependent on whether the fingers are straight or flexed. This is illustrated in Figure 31. With the fingers extended the wrist can flex to almost 90º, but with the fingers clenched into a fist the range of wrist flexion is significantly reduced. FIGURE 31. THE INTERACTIONS OF THE WRIST AND HAND MOTION CAUSES THE RANGE OF WRIST FLEXION TO BE DEPENDENT IN PART ON THE POSITIONS OF THE DIGITS. Activity: With your wrist straight grasp a pen in your hand making a fist around it. With your other hand gently push your wrist into flexion. Notice how your grip on the pen is loosened. Unit 3 - Biomechanics of the Upper Limb & Spine 21 5. THE SPINE The spine (or vertebral column) forms the longitudinal axis of the skeleton. It is a complex structure consisting of 24 unfused vertebrae, the sacrum and coccyx (Figure 32). Its principal functions are to protect the spinal cord, transfer loads from the head and trunk to the pelvis, and allow movement of the trunk. C1 cervical 7 vertebrae C7 T1 dorsal (thoracic) 12 vertebrae T12 L1 lumbar 5 vertebrae L5 sacrum and coccyx (5 and 4 fused vertebrae) FIGURE 32. THE SPINE. The spine is divided into five regions, as shown in Figure 32. They are the: ¾ cervical ¾ thoracic ¾ lumbar ¾ sacrum ¾ coccyx. In each region of the spine the vertebrae are slightly different in structure, as is the overall structure, function and range of motion in each region. The vertebrae of the cervical, thoracic and lumbar regions are numbered from the top downwards and labelled C, T and L respectively, as shown in Figure 32. SAQ 12 - Name the five regions of the spine. 5.1 Vertebrae All the unfused vertebrae, except the first two cervical vertebrae, resemble each other in certain features. They all have a flat, rounded body placed anteriorly and centrally, called the vertebral body, an arch of bone, called the neural arch, that forms the spinal foramen through which the spinal cord passes, a spinous process projecting inferiorly in the posterior mid-line and two transverse processes projecting laterally. These processes provide anchorage sites for the ligaments and muscles which stabilise and move the spine. A typical vertebra is shown in Figure 33. VERTEBRAL BODY NEURAL ARCH SPINAL FORAMEN SPINOUS PROCESS TRANSVERSE PROCESS Unit 3 - Biomechanics of the Upper Limb & Spine 22 (A) spinous process vertebral body articular surfaces of a facet joint spinal foramen spinous process (B) neural arch FIGURE 33. A TYPICAL VERTEBRA (A) FROM THE SIDE (B) FROM ABOVE. Each vertebra articulates with each adjacent vertebra at three points. The main articulation is at the vertebral body via an intervertebral disc, the other two are facet joints. These synovial joints are positioned on either side of the arch. The upper facets articulate with the lower facets of the vertebra above, and the lower facets articulate with the upper facets of the vertebra below. FACET JOINTS 5.2 Intervertebral Discs The intervertebral disc is of great mechanical and functional importance. It has a dual role of bearing and distributing loads and of restraining excessive motion. The cylindrical discs are made up of the inner nucleus pulposus and the outer annulus fibrosus (Figure 34). The nucleus pulposus lies directly in the centre of all discs except those in the lumber segments where it is slightly posterior. It is formed by a strongly hydrophilic (waterloving) gel that is enmeshed in a random collagen matrix. The hydrophilic gel produces a high water content and an elevated nucleus pressure. The internal pressure balances the applied compressive stress. If the applied stress is increased water is driven out of the disc until a new steady state is reached. Likewise, when the applied stress is decreased the disc rehydrates. However, this mechanism is not capable of maintaining a constant level of hydration over a long period of time. The reduction in hydration over time results in a decreased disc height which is evident in the loss of standing height over the day which can be as much as 1 cm. The annulus fibrosus is a tough layer which surrounds the nucleus pulposus. It is composed of collagen fibres. These form concentric layers (lamellae) with alternating orientations of the collagen fibres (Figure 34). This arrangement resists high bending and torsional loads. annulus fibrosus nucleus pulposus lamellae of annulus fibrosus FIGURE 34. SECTION THROUGH AN INTERVERTEBRAL DISC. Unit 3 - Biomechanics of the Upper Limb & Spine 23 NUCLEUS PULPOSUS ANNULUS FIBROSUS 5.3 The Cervical Spine The cervical spine consists of the seven vertebrae that form the neck. This is the most mobile region of the spine. CERVICAL SPINE The two most superior vertebrae, the atlas (C1) and the axis (C2) are particularly mobile (Figure 35). In structure they are quite different from the other cervical vertebrae. The atlas has no body but is composed of a ring within which an oval fossa articulates with the axis. The axis has an articular process, the dens, which protrudes superiorly from the vertebral body. A small synovial joint is formed between the anterior tip of the dens and the oval fossa of the atlas. The atlas rotates about the dens but the motion is restricted by several ligaments that are attached to the top of the dens. dens atlas axis FIGURE 35. TWO CERVICAL VERTEBRAE - THE ATLAS AND THE AXIS. 5.4 The Thoracic Spine The thoracic spine or dorsal spine consists of the twelve vertebrae located in the posterior part of the thoracic region of the trunk (the chest). Each of these vertebrae is attached to a pair of ribs. Each rib articulates with the body and the transverse process of its corresponding thoracic vertebra. The head of each rib articulates with the body and the tubercle of each rib articulates with the transverse process. In addition the second through to ninth ribs articulate with the body of the vertebra above. These articulations allow the ribs to move up and down as we breathe. The ribs give added rigidity to the thoracic spine which effectively limits its mobility to only a very limited degree of flexion and extension and little rotation. spinous process transverse process rib facet joint articulations vertebral body spinal foramen FIGURE 36. A TYPICAL THORACIC (DORSAL) VERTEBRA SHOWING THE ARTICULATION WITH A RIB. Unit 3 - Biomechanics of the Upper Limb & Spine 24 THORACIC SPINE 5.5 The Lumbar Spine The lumbar spine consists of the five vertebrae of the lower back. The lumbar vertebrae are subjected to significantly greater loads than the vertebrae in the rest of the spine. This is apparent in their larger bodies. LUMBAR SPINE 5.6 The Sacrum and Coccyx The sacrum and coccyx form the distal portion of the spine, lying below the lumbar vertebrae. In adults the sacrum is a single triangular-shaped bone that has resulted from the fusion of five separate vertebrae and the coccyx is a single bone that has resulted from the fusion of four or five vertebra. The sacrum forms the link between the lumber spine and the pelvic girdle. The junction between the sacrum and the lumber spine is very mobile. The sacrum is joined to the two innominate bones of the pelvis by two fibrous joints that allow only a small amount of relative motion (Figure 37). sacrum ilium coccyx ischium FIGURE 37. 5.7 Range of Motion The overall range of motion of the spine is large. The actual ranges, however, vary considerably between individuals depending on their sex and age. The range of motion is particularly dependent upon age, in old age the range is around half that in youth. All the movements of the spine are a result of the combined movement of several vertebrae, the amount of motion between adjacent segments is generally small and does not occur independently. 5.7.1 Flexion-extension Flexion of the spine occurs when bending forward and extension when bending backwards (Figure 38). The range of flexion-extension motion between adjacent segments varies between different regions of the spine. It is greatest in the cervical spine, with a total range of flexion-extension of around 21 degrees between C4 and C5, and smallest in the thoracic spine, with a total range of around 3 degrees between T9 and T10. The maximum amount of flexion and the maximum amount of extension between adjacent segments also varies. This is particularly true in the lumbar spine where the maximum range of flexion averages about 10 degrees and the maximum range of extension averages only around 4 degrees. Unit 3 - Biomechanics of the Upper Limb & Spine 25 SACRUM COCCYX flexion extension FIGURE 38. FLEXION AND EXTENSION OF THE SPINE. During actual movements the motion of the spine is complex and often combined with motion in other parts of the skeletal system. For example, during forward bending the first 50 to 60 degrees of flexion occurs in the lumbar spine with any further flexion being achieved by the tilting of the pelvis forward. 50° 50° pelvic tilting FIGURE 39. FORWARD FLEXION OF THE TRUNK. 5.7.2 Lateral bending Lateral bending is the motion from side to side in the frontal plane. The amount of lateral motion has a similar distribution to that of flexion and extension, with the cervical spine being the most mobile and the thoracic spine the least (Figure 40A). Notably there is no lateral bending between the first two cervical vertebrae, the atlas (C1) and axis (C2), and no rotation between the atlas (C1) and the occipital (OC) bone of the skull. Unit 3 - Biomechanics of the Upper Limb & Spine 26 (A) lateral flexion (B) rotation FIGURE 40. RANGE OF MOTION BETWEEN ADJACENT VERTEBRAE. (A) LATERAL FLEXION (B) ROTATION. 5.7.3 Rotation The amount of rotation about the longitudinal axis of the spine generally decreases down the spine (Figure 40). Notably, the range of rotation is considerably larger between the atlas (C1) and axis (C2) than between any other vertebrae. This is due to their unique structure. SAQ 13 - Try to estimate the amount of range of rotation in your lumbar and thoracic spine. First of all stand up in front of a wall with your arms folded and twist gently from side to side whilst keeping your arms fixed relative to your chest. Note, how the angle between your folded arms and the wall changes. Does this give a true representation of the range of rotation in your lumbar and thoracic spine? 5.8 Loadings on the Spine The loadings on the spine are mainly due to the weight of the upper body, muscle activity and externally applied loads. Not surprisingly the lumbar spine carries the highest loadings and this is reflected in the larger vertebra found in the lumbar region as compared to those in the thoracic and cervical regions. Despite this lower back pain in the lumbar region is very prevalent and usually results from a bad posture during standing or sitting, or by bad bending or lifting techniques. Studies of the loads on the lumbar spine during various postures have demonstrated that bad postures increase the loads on the vertebrae. For example, Figure 41 shows a bar chart of the comparative loads on the third lumbar intervertebral disc for different postures. The load during standing is defined as 100% during upright standing. Note that during sitting the loading is actually larger than during upright standing and how slumping forwards can almost double the load. Unit 3 - Biomechanics of the Upper Limb & Spine 27 200% 150% 100% 50% prone erect standing erect sitting bent forward standing relaxed sitting FIGURE 41. LOADINGS ON THE LUMBAR SPINE WITH DIFFERENT POSTURES. These results can be explained by considering the position of the upper body relative to the lumbar spine. In Figure 42 the vertical arrow shows the direction of the weight of the upper body in two cases: for upright standing and relaxed unsupported sitting. The moment arm of the upper body mass about the lumbar spine is increased in the case of relaxed sitting due to the backward tilt of the pelvis. The flexion moment produced by the upper body weight and the moment arm must be counterbalanced by an extension moment produced by the posterior back muscles. The larger the moment arm is the greater the muscle forces need to be. The muscles produce a compressive load on the spine which increases with increasing muscle force. Thus any change in posture that causes the upper body to be in a position offset from the lumbar spine effectively increases the load that it must carry. Even during erect sitting the moment arm is slightly greater than that during upright standing, giving a slightly increased load on the lumbar spine. moment arm moment arm weight weight (A) (B) FIGURE 42. LUMBAR SPINE MOMENT DURING (A) STANDING AND (B) SITTING. Unit 3 - Biomechanics of the Upper Limb & Spine 28 Similarly, during lifting the load on the lumbar spine is increased in accordance with the increase in the moment arm produced by weight of the object being lifted. This is illustrated in Figure 43. In the first case (Figure 43A), the moment arms of the weight of both upper body and the object are greater than when lifting the same object with the knees bent (Figure 43B). This bad lifting technique results in a considerably larger load on the lumbar spine which could be avoided by bending the knees and keeping the object closer to the body. (A) (B) FIGURE 43. LUMBAR SPINE MOMENT ARMS WITH (A) BAD LIFTING POSTURE (B) GOOD LIFTING POSTURE. SAQ 14 - As the moment arm of the upper body weight increases does the loading on the spine increase or decrease? Unit 3 - Biomechanics of the Upper Limb & Spine 29 SUMMARY In this unit you have been introduced to the biomechanics of the upper limb and spine. Mechanically the upper limb is designed for the delicate manoeuvring of the hand. Nevertheless it must also withstand the high forces generated at joints caused by muscle contractions and external loads. Overall the spine displays a considerable range of flexibility but between adjacent vertebrae the range of motion is generally small. The loadings on the spine can be considerable especially in the lumbar region. Unit 3 - Biomechanics of the Upper Limb & Spine 30 SAQ ANSWERS SAQ 1 (a) The four articulations of the shoulder joint are the glenohumeral, acromioclavicular, sternoclavicular and the scapulothoracic. (b) The shallow depression in which the humeral head rests is called the glenoid fossa. SAQ 2 (a) The ligament about whose attachment the clavicle rotates during elevation and depression is the costoclavicular. (b) The scapulothoracic articulation is not a joint in the truest sense - there are no direct bony or ligamentous connections. SAQ 3 Forward flexion-backward extension Abduction-adduction Internal-external rotation Horizontal flexion-extension Forward flexion 180° Backward extension 60° Range 240° Abduction 180° Adduction 75° Range 255° Internal rotation 90° External rotation 90° Range 180° Horizontal flexion 135° Horizontal extension 45° Range 180° SAQ 4 The resistance force must be 10 times the magnitude of the applied force, that is 1000N. SAQ 5 Flexion-extension Pronation-supination Extension Flexion Range Pronation Supination Range 0° 140° 140° 70° 80° 150° Unit 3 - Biomechanics of the Upper Limb & Spine 31 SAQ 6 lateral collateral ligament SAQ 7 Yes, the elbow joint force could be assumed to have both horizontal and vertical components. Summing the horizontal force components would then give a result of zero for the horizontal elbow joint component and summing the vertical forces would give a negative result if the vertical component was defined as acting upwards. SAQ 8 (a) Total body weight = 9.8 × 85 = 833 N. The flexor muscle force is 820 N, therefore it is equal to 0.98 of total body weight. The elbow joint force is 760 N, therefore it is equal to 0.91 of total body weight. (b) If the flexor muscle force did not act vertically then the elbow joint force would need to have an equal but opposite horizontal component to maintain static equilibrium. SAQ 9 (a) The bones that form the proximal row of the wrist are the triquetrum, lunate and scaphoid and those that form the distal row are the hamate, capitate, trapezoid and trapezium. (b) The lever arm of the flexor carpi ulnaris muscle is increased by the pisiform bone. SAQ 10 (a) The principal motions of the wrist joint are flexion-extension and adbuctionadduction. (b) Most wrist extension occurs at the radiocarpal joint. (c) The most functional position for an immobilised wrist joint is around 15 degrees of extension. Unit 3 - Biomechanics of the Upper Limb & Spine 32 SAQ 11 The maximum amount of flexion at the metacarpophalangeal joints generally decreases from the fifth to the second joint. At the fifth joint (little finger) it is around 95 to 100 degrees and at the second joint (index finger) it is about 70 degrees. SAQ 12 The five regions of the spine are the cervical, thoracic, lumbar, sacrum and coccyx. SAQ 13 No. When standing and gently twisting from side to side motion also occurs in the lower limbs. Do the same again but this time sitting down. This should give you a better estimate of the range of rotation in your lumbar and thoracic spine. SAQ 14 The loading on the spine increases as the moment arm of the upper body weight increases. Unit 3 - Biomechanics of the Upper Limb & Spine 33