Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 3 – Processes (Pgs 101 – 141)
CSCI 3431: OPERATING SYSTEMS
Processes
Pretty much identical to a “job”
A task that a computer is performing
Consists of:
1. Text Section – Program Code
2. Data Section – Heap, Stack, & Free Space
3. Current State – CPU Register Values
Program:
Process:
Thread:
Passive entity on disk
Active entity in memory
A part of a process (Ch. 4)
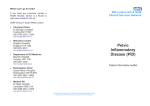
Process Layout (x86)
c.f., Text Fig 3.1
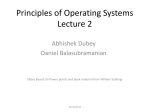
Process States
New: Being created
Running: Has a CPU, being executed
Suspended: Not running (covers both ready
and waiting)
Ready: Could be running if assigned to a CPU
Waiting: Needs something (e.g., I/O, signal)
Terminated: Done
Fig. 3.2 Process State
Process Control Block (PCB)
O/S (Kernal) Data Structure for a process
State - ready, etc.
Registers – current values, includes PC
Scheduling Info – priority, queue address
Memory Info – pages tables, base address
Accounting Info – owner, parent, CPU use, pid
I/O Status Info – open files, devices assigned
The Unix ps command
tami@cs:0~]ps -l
F S
UID
PID
PPID
C PRI
NI ADDR SZ WCHAN
TTY
TIME CMD
0 S
1021 17012 17011
0
80
0 -
9848 rt_sig pts/18
00:00:00 zsh
0 R
1021 17134 17012
0
80
0 -
1707 -
00:00:00 ps
pts/18
tami@cs:0~]
F = Flags, S = State, UID = User, PID = Process
PPID = Parent, C = CPU % use, PRI = Priority
NI = Nice, ADDR = Swap Addr, SZ = Num pages
WCHAN = Kernel function where sleeping
TTY = Controlling Terminal Device
TIME = CPU Time, CMD = File Name
Lots of other data is available using options!
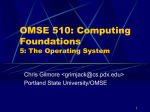
Scheduling Queues
Happy little places for processes to wait (just
like the lines at Starbucks)
Job Queue: All processes in the system
Ready Queue: All processes ready to run
Device Queue(s): Processes waiting for a
particular device (each has own queue)
Often just a linked list of PCBs
Queueing Diagram (Fig 3.7)
Scheduler
O/S component that selects a process from a
queue
Long term (job): select process to be loaded into
memory (make ready)
Short term (cpu): select ready process to run
I/O: select process from the I/O queue for that device
Context Switch: Changing the executing process
on a CPU; requires saving state of outgoing
process, restoring state (if any) of incoming
process
Process Mix
Computers work best when a variety of
processes with different needs exist
CPU-bound process: most of its life is
computations, very little I/O
I/O-bound process: most of its life is spent
doing I/O, minimal computation
Long term scheduling works best if a mix of
these is in memory
Medium Term Scheduler
Monitors memory and removes some
processes which it writes to disk (“swap out”)
Later moves the process back to memory so
it can be executed (“swap in”)
Will cover this more in Ch. 8
Process Creation
All processes have a parent
Thus there is a process tree
Every process has a PID
Two step process in Unix
Create a new (duplicate) process : fork()
2. Overlay duplicate with new program: exec()
1.
Fork() and Exec() (Fig 3.10)
pid_t pid = fork();
// Duplicate myself
if (pid < 0) error(); // No child, parent OK
if
(pid == 0) {
// Child, don’t know own pid
execlp(“/bin/ls”,”ls”,NULL);
} else {
// Parent w. opt. wait for child completion
wait(NULL);
printf(“Child complete.\n”);
}
fork(): Making a COPY
The copy is identical. Has same code, same heap,
same stack, same variables with same values
Only difference is that child has different PID and
PPID
Forking
After fork(), either child or parent, or both,
could be executing – no guarantees here!
wait() causes parent to wait for child to
terminate
exec family of syscalls overlays child process
Additional coding must be performed to
allow parent and child to communicate (IPC)
Termination
Processes terminate with the exit() syscall
GCC inserts it for you after the last executable
instruction (or a jmp to it if many exit points)
Some O/S terminate all children of a terminating
process, “cascading termination”
Parents can terminate their children
Arbitrary processes cannot terminate each other
O/S can terminate a process for a variety of
reasons (e.g., security, on errors)
Exit value of a terminated process is stored for a
while (e.g., until reboot or PID reused)
Summary (Unix)
New processes made by an existing process
using FORK
New process is a copy of the old
Both parent and child are running after the
FORK
New process must get new program and data
using EXEC
Parent can WAIT for child or continue
Processes terminate using EXIT
Interprocess Communication
Efficiency: Save having 2 copies of something
by letting it be shared
Performance: Sharing results of parallel
computations
Co-ordination: Synchronising the transfer of
results, access to resources etc.
Two primary reasons:
Coordination/Synchronisation
2. Data transfer
1.
IPC Models (SGG)
1. Shared Memory – common memory
location for both processes to read and write
2. Message Passing – kernel acts as a gobetween to receive and send messages
(shared memory is managed by the kernel
instead)
But, really, its always just some kind of shared
memory and there are more than two models
IPC Models
Shared memory
Message passing
Mailboxes & Ports
Remote Procedure Calls
Pipes
Interrupts (users to O/S)
Signals (limited information content)
Semaphore
Based on a railroad analogy
Semaphores (flags) determined which track a
train could use so that only one was on the track
at a time
Used to create “mutual exclusion”
Usually requires hardware (CPU) support
Will look more carefully at semaphores in
Chapter 6
Coordination and synchronisation is one of the
most difficult tasks in multiprocess
environments
Making a Semaphore
P1: Reads, sees its clear, decides to use
OS: Switches from P1 to P2 (time slice end)
P2: Reads, sees its clear, decides to use
P2: Writes, starts using
OS: Switches from P2 to P1 (time slice end)
P1: Writes, starts using
*** CRASH! P1 and P2 BOTH USING ***
Read/Write has to be atomic and not
interruptable
Tricky to implement efficiently
Shared Memory
O/S normally prevents one process from
accessing the memory of another
Requires setup to be effective
Processes must somehow co-operate to
share the memory effectively or else they can
over-write each other’s data
Simultaneous writes cause a big mess!
Unix Shared Memory
A “key” is used to name the shared segment.
Any process with the key can access it.
The segment is located using shmget()
The segment is attached using shmat()
Generally “fast” for doing communication
Uses standard Unix permission system
Highly useful techniques are possible
Read/Write coordination is needed
Producer-Consumer Problem
Producer creates something
Consumer uses that product
Consumer must wait for it to be produced
and fully put into memory
Producer must wait for consumer to create
space where the product can be put if the
space fills up
Requires careful communication and
synchronisation
Message Passing
Uses the O/S to receive, buffer, and send a
message
Uses the send() and receive() syscalls
What if a process tries to receive when
nothing has been (or will be) sent?
Like shared memory, message passing
requires careful coding and co-ordination by
the two+ processes
Direct Communication
Uses process names (PIDs)
Requires knowing the PID of everyone we
communicate with
If a process terminates, must find its PID and
delete it
Main drawback is maintaining the list of active
PIDs we communicate with
Send goes to only one process so multiple sends
may be needed
Works great in many situations though
Indirect Communication
Uses mailboxes or ports
Mailbox is an O/S maintained location where
a message can be dropped off or picked up
All mailboxes have a name
Multiple processes can read from the mailbox
Mailbox can be owned by O/S or a process
Still have the problem of communicating the
mailbox name/location, but at least now the
O/S knows this information as well
Synchronicity
(Not the Police Album)
Message passing can be either:
1.
2.
Blocking / Synchronous
Non-Blocking / Asynchronous
Synchronous send() waits for receipt before
returning
Synchronous receive() waits for the send to
complete before returning
Asynchronous operations return even if no
receipt occurs or if data is not available
When both are synchronous, we have a
“rendezvous”
Buffering
1. Zero Capacity: There is no buffer and data is
discarded if the communication is not
synchronous
2. Bounded Capacity: The buffer is fixed size
and sender blocks when the buffer fills
3. “Infinite” Capacity: O/S allocates more space
to buffer as required
Remote Procedure Call (RPC)
A protocol designed so that a process on one
machine can have computation performed by
calling a procedure (function) that is executed
by a different process on another machine
Issues with endianism, data encoding
Must define a common data representation
Issues with synchronisation of processes and
returning of results
Sockets
Associated with Internet-based IPC
A socket is an IP address (a machine) and a
specific port on that machine
We normally don’t see them because WWW
services tend to have a default port, e.g., Port
80 for HTTP
Can use 127.0.0.1 (loopback) to test things,
e.g., client and server on same machine
http://en.wikipedia.org/wiki/List_of_TCP_and_UDP_port_numbers
Pipes
A connection (with buffer) for sending data
Data of any form can be sent
Best for one directional communication
Can be used two way if emptied between
uses
Very common in Unix, considered as the most
basic form of IPC
Named pipes (called FIFOs) are file system
entities in Unix
To Do:
Complete this week’s lab on chmod()
Finish reading Chapter 3 (pgs 101-141; this
lecture) if you haven’t already