Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Mercury-arc valve wikipedia , lookup
Power engineering wikipedia , lookup
Electrical ballast wikipedia , lookup
Distributed control system wikipedia , lookup
Power inverter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Three-phase electric power wikipedia , lookup
Control theory wikipedia , lookup
Schmitt trigger wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power MOSFET wikipedia , lookup
Current source wikipedia , lookup
Resilient control systems wikipedia , lookup
Control system wikipedia , lookup
Electrical substation wikipedia , lookup
Surge protector wikipedia , lookup
Stray voltage wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Voltage regulator wikipedia , lookup
Voltage optimisation wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Mains electricity wikipedia , lookup
Opto-isolator wikipedia , lookup
Current mirror wikipedia , lookup
Alternating current wikipedia , lookup
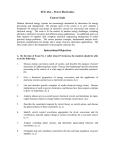
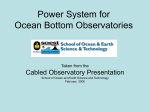
The 30th Annual Conference of the IEEE Industrial Electronics Society, November 2 - 6, 2004, Busan, Korea Adaptive Voltage Regulation and Equal Current Distribution of Parallel-Buck DC-DC Converters Using Backstepping Sliding Mode Control Shui-Chun Lin and Ching-Chih Tsai, Senior Member, IEEE, Department of Electrical Engineering, National Chung Hsing University 250, Kuo-Kuang Road, Taichung 40227, Taiwan [email protected] Abstract-This paper develops a novel methodology for voltage regulation and equal current distribution of parallel-buck DC-DC converters. Such converters are modeled as linear averaged state-space system models with adjustable loads. Two measurements, such as output voltage and inductor current, are used to accomplish the design of an adaptive backstepping sliding mode controller for the Parallel-buck DC-DC converters. Based on the singular perturbation method, a reduced order model is derived in order to show that the effect of equivalent series resistance (ESR) of the capacitor can be ignored and the parallel converters can be well approximated by the reduced order model. With the reduced order model, an adaptive sliding mode control utilizing backstepping approach is proposed to control the parallel-buck DC-DC converters. This proposed control method has been verified by computer simulations, and has also been proven capable of giving satisfactory voltage regulation performance under input voltage variations and load changes. Keywords: Adaptive control, backstepping, parallel DC-DC converter, pulse width modulation (PWM), voltage regulation, sliding mode control. I.INTRODUCTION aralleled DC-DC converters have been shown to have several advantages over stand-alone converters with identical capacities. The merits of parallel DC-DC converters include increased power processing capability, improved reliability, enhanced availability, long term maintainability and etc. In particular, in applications to higher power demands, the use of parallel DC-DC converters is able to share the same load with significant reduction of component stress and output voltage ripple. Generally speaking, the parallel-buck DC-DC converters are not identical and thus unbalanced currents are drawn from their outputs. The facts are caused by many factors, such as component tolerances, nonidentity conductors from the converters to the current distribution, and others. The equal current distributions among converters are very important for the reliability of the system. Without a proper current sharing control design, the converters may become unstable and their life-times may be shortened or the converters’ performance may be degraded. Many control strategies have been used to achieve equal current sharing for parallel operation of the converters. Rajagopalan et al. [1] carried out a master-slave method, and Kim et al. [2] performed a droop method. The master-slave method is a kind of P 0-7803-8730-9/04/$20.00 2004 IEEE active control scheme. With the typical master-slave method, it is necessary to intercommunicate between the master and slave modules, and their interconnections are complicated. The major deficiencies of the droop approach are poor voltage regulation and poor current sharing characteristics. In order to accomplish the equal current distribution and the regulated output voltage, many different switching control design approaches have been proposed for parallel operations of the converters [3-9]. All these approaches have tried to reach this goal with a minimum of technical complexity in order to keep the optimal performance optimization. More recently, the implementation of advanced control algorithm utilizing standalone digital signal Processor (DSP) concepts in switching power supply systems seem to be of growing interest. DSP control offers several advantages for control structures and the control redesign can be changed by modifying only the software, thereby providing possibility of the use of adaptive control and even complicated control strategies. This paper is concerned with the control problem of parallel DC-DC converters with a DSP control chip. The backstepping sliding mode control and adaptive control policies will be used to develop high-performance regulation laws for the parallel converters. The singular perturbations design methodology has been extensively used for a large class of nonlinear systems that can be decomposed into slow dynamics and fast dynamics. Those control theories and techniques using singular perturbations method have been widely explored in [14, 15, 18]. In this paper we are interested in how the singular perturbations method can be applied to show that the effect of equivalent series resistance (ESR) of the capacitor C in a buck DC-DC converter can be ignored, and to derive a order reduced slow model for the circuit in order to develop an adaptive and efficient control policy for achieving the required performance. Adaptive backstepping is a systematic and recursive design methodology for nonlinear feedback control. This type of method has been well studied and documented in [13, 16, 17]. This approach is based upon a systematic procedure for the design of feedback control strategies suited for nonlinear systems with exhibiting uncertainties, and guarantees global regulation and tracking for the nonlinear systems transformable into the parametric–strict feedback forms. As the authors’ best understanding, this design approach has not yet been applied to regulate the parallel-buck DC-DC converters. The objective of this paper is to develop reduced slow state-space models of the converters using singular perturbation method based on output voltage and inductor current measurements, and to design adaptive backstepping sliding-mode controllers for N paralleled buck DC-DC converters with the required specifications. To make the design feasible, computational simulation is used to verify its performance, and the Lyapunov second theorem is used to analyze the stability of the designed control system. The remainder of this paper is organized as follows. Section II establishes the circuit’s reduction using singular perturbation method. Section III is devoted to deriving a reduced slow model of the circuit. In Section IV, an adaptive backstepping sliding-mode approach is adopted for synthesizing a controller to regulate the converters’ output voltage. Computer simulations are conducted in Sections V to show the effectiveness of the proposed control method. Finally, the conclusions of the paper are stated in Section VI. II. SINGULAR PERTURBATION ANALYSIS Consider PWM-based N paralleled buck converters with adjustable loads. Fig.1 depicts a basic configuration of N paralleled DC-DC buck converters, each of which consists of a power MOSFET transistor as a switch, a fast recovery diode and RLC components. Throughout this paper, the parallel-buck converters are assumed to operate in continuous conduction mode (CCM) [11]. To simplify the notations, we define that iL i be the current passing through the inductor Li , i C i be the current in the capacitor ci , io be the converter output current. Moreover, v i denotes the DC input source voltage, v o is the converter output voltage, ri is the equivalent series resistance of inductor Li , rc is the equivalent series i resistance of the capacitor ci . In order to provide an analytical model for predicting the responses of the converter with respect to load changes, input voltage variations and uncertainties caused from circuit elements, we model the adjustable load current io as a fixed load current iM and a variable current iN . Note that the current iN remains constant except at the time instants to change voltage setpoints. In Fig.1, the transistor operates at a fixed frequency with a period T with a duty-ratio d . The inductor current is assumed to be continuous, and the inductance and capacitance components are lossless and the output capacitor ripple voltage is considered to be negligible. The relationship between steady-state output voltage and duty-ratio is obtained from equating the positive and negative inductor volt-seconds within a switching cycle. In what follows study the two-time scale properties of the standard model and give approximate models based on the decomposition of the models into slow and fast models. In doing so, we consider N parallel-buck converters with a fixed load current, iM and an adjustable current, i N , shown in Fig.1. Notice that the resistance R in Fig.1 is fixed. The application of linear circuit modeling method [10-13] with aforementioned conditions leads to the i L1 r1 Power MOS vi L1 iC 1 rc 1 Diode C1 vc1 iL 2 r2 Power MOS io L2 rc 2 Diode vi C2 iC 2 iM iN vo R vc 2 iLn rn Power MOS Ln Diode vi rcn Cn iCn vcn Fig.1 A schematics of N parallel-buck DC-DC converters following equations: di Li Li + rii Li = vi di − vo dt diCi dv d iCi = Ci ( vo − iCi rCi ) = Ci o − Ci rCi dt dt dt Let ε i = Ci rC be a time constant. Since 0 < ε i << 1 (1) (2) i then (2) becomes εi diCi dt + iCi = Ci dv o , dt (3) i = 1, 2, ...... n By decomposing the model (3) into slow iCis (reduced) and fast iCif (boundary) modes. i.e., iCi = iCif + iCis , we obtain the fast mode satisfying diC ε i if + iCi f = 0 dt and the slow state described by dv iCi = ic is = Ci o dt By a simple calculation, we obtain iC i f = Ae − (4) (5) t (6) εi which leads to that ic f → 0 as t > 5ε .Consequently, for t > 5ε , it follows that i iCi = ici f (t ) + ic i s (t) ≅ ici s (t) = Ci dvo dt (7) (7) reveals that, after a very short transient time, the effect of equivalent series resistance (ESR) of the capacitor rC can be ignored; (2) can be well approximated by the slow state (7). III. REDUCED SLOW MODEL The general circuit topology for parallel operation of switching buck DC-DC converter is shown in Fig.1. This total output current equal to the sum of the inductor currents of each converter module could be expressed by the following equation: iL1 + iL2 + ... + iLi = iC1 + iC 2 + .... + iC i + vo + iN (8) R and each inductor current satisfies the averaged model Li diLi + ri iLi = vi di − vo , where i = 1, 2,.....n (9) dt With the overall reduced slow model (7), (8) can be rewritten as n ∑ i =1 n iLi = ∑ Ci i =1 =C dvo vo + + iN dt R n dvo vo + + iN , C = ∑ Ci dt R i =1 (10) which leads to dvo 1 n v i = ∑ iL − o − N C dt C i =1 RC (11) i approaches zero as t tends to infinity. The asymptotical stability property of ve can be shown by selecting a Lyapunov function as below t 1 1 V1 = Cve2 + (16) (k I ve (τ )dτ + iN ) 2 0 2 2k I The time derivative of V1 along its trajectory is V = −(k + 1/ R )v 2 . Since V is negative definite, we ∫ 1 p 1 e have ve → 0 as t → ∞ . Remark 1 The parameters k p and k I can be designed such that (15) has a desired characteristic function. IV. ADAPTIVE BACKSTEPPING SLIDING MODE CONTROL DESIGN This section aims to develop an adaptive control strategy for overcoming the problem with unknown circuit parameters and load variations. In the sequel an adaptive sliding mode controller with output voltage and inductance current measurements will be proposed to regulate the circuit’s output voltage and to have equal current distribution for the parallel-buck DC-DC converter. In doing so, we rewrite (9) for each converter as − β i iLi − γ i vo + di , i = 1, 2,...n (12) iLi = αi where αi = Li r 1 , β i = i , γ i = , and vii vii vii α i , βi , γ i , are assumed to be unknown parameters. The control goal of the converter is to find a controller with adjustable parameters and a set of parameter adaptation laws such that the output voltage vo tracks the desired constant reference voltage v ref . To achieve the goal, we define the tracking error as ve = vo − vref . This implies that vo = ve + vref and vo = ve . Hence, (11) and (12) can be rewritten as 1 n 1 ve = (∑ iLi − vo − iN ) (13) C i =1 R − β i iLi − γ i vo + di (14) iL i = αi The detailed design procedure of the proposed adaptive backstepping sliding mode controller for the converter is stated in the sequel. Step1: To facilitate the design of controller, let i Li be considered as a virtual control variable such that the state variable v e is asymptotically stable. Thus, by designing t 1 vref − k p ve − k I ∫ ve (τ )dτ ) , k I > 0, k P > 0 ( 0 n R we obtain the following dynamics of the error v e iLi = φ (ve ) = t dve v (15) = − e − k p ve − k I ∫ ve (τ )dτ − iN 0 dt R The subsequent method is used to show that ve C Step2: This step aims at finding a controller suited for adaptive strategy using backstepping and sliding mode approach. The following sliding surface si = iLi − φ (ve ) is selected to attain the controller design. Differentiating the sliding surface function yields 1 si = iLi − φ(ve ) = iLi − ( − k p ve − k I ve ) n 1 1 = iLi + k p ve + k I ve n n − β i i Li − γ i vo + d i 1 1 (17) = + k p ve + k I ve n n αi The switching control d i is designed in the following form 1 1 di = γ i vo + βi iLi − α i ( k p ve + k I ve ) − k1i si − ve − k2i sgn (si ) (18) n n such that si = −ve − k1i si − k2i sgn (si ) αi (19) , k1 ≥ 0, k2 > 0 Notice that the control (18) can be reduced to a type of sliding mode control if the parameter k1i is zero. In order to prove the asymptotical stability of the overall system, we need to rewrite (15) as below n t dv v (20) C e = ∑ si − e − k p ve − k I ∫ ve (τ )dτ − iN 0 dt R i =1 and propose the following Lyapunov function candidate V2 = t 1 2 1 1 n (k I ∫ ve (τ )dτ + iN ) 2 + ∑ α i si2 , α i > 0 Cve + 0 2 2k I 2 i =1 Taking the time derivative of V2 along its trajectory n t gives V2 = veCve + ve ( k I ve (τ )dτ + iN ) + ∑ siα i si ∫ 0 i =1 From (19) and (20), it follows that n n n i =1 i =1 i =1 2 V2 = −(k p + 1/ R)ve2 + ve ∑ si − ve ∑ si − ∑ (k1i si + k2i si ) n = −(k p + 1/ R)ve2 − ∑ (k1i si + k2i si ) < 0 2 (21) i =1 which implies that V2 is negative semidefinite. With Barbalat’s lemma, we imply that ve → 0 and si → 0 , i = 1, 2,..., n. as t → ∞ . Step 3: Find a set of parameters adaptation laws such that s → 0 and v e → 0 as t → ∞ .We propose the following adaptive control law (22) 1 1 d i = γˆi vo + βˆi iLi − αˆ i ( k p ve + k I ve ) − k1i si − ve − k2 i sgn ( si ) n n si = iLi − [ vref t − k I ∫ ve (τ )dτ − k p ve ] (23) 0 R where αˆ i , βˆi , γˆi , are the estimates of the parameters α i , β i , and γ i . Substituting the control (22) into (17), one obtains ~ 1 1 − β i iL i − γ~i vo + α~i ( k p ve + k I ve ) − ve − k1i si − k 2 i sgn ( si ) (24) n n si = Table1. 3parallel-buck converters parameters. parameter value parameter value r1 r2 r3 L1 L2 0.19 Ω 0.2 Ω 0.21 Ω 1.1mH 1mH R C kI kp k1i 10 Ω 10 µ F 100 0.001 0.5 L3 vi 0.9mH 20V k2i f 0.000001 20KHz adaptive control (22), (23) with the set of parameter adaptation laws (27),are globally uniformly bounded, thereby implying that all the variables, ˆ ˆ ˆ α i , β i , γ i , si , iLi , vo , ve , are globally uniformly bounded for t ≥ 0. Furthermore, ve → 0, si → 0 as t →∞ . αi Next, we find a Lyapunov function and use it to derive parameter adaptation laws t 1 1 ( k I ∫ v e (τ )d τ + i N ) 2 + 0 2kI 2 2 2 2 n α β γ i +∑( i + i + ) 2 λ 2i 2 λ 3i i = 1 2 λ 1i Va = n ∑α s i =1 2 i i + 1 C v e2 (25) 2 where λ1 > 0, λ2 > 0, λ3 > 0, α~i = α i − αˆ i , β~i = β i − βˆ i , γ~i = γ i − γˆi and α~ i = −αˆ i , β~i = − βˆi , γ~i = −γˆi . Taking the time derivative of V a and using (24) yield i i i Va = −(1/R + k p )ve2 + ∑ [α i si si − (α~i /λ1i )αˆ i ] n i =1 ~ − ∑ [( β i /λ2i ) βˆi + (γ~i i / λ3i )γˆi ] n t =1 and ~ 2 ai si si = −βi iLi si − γ~i vo si + α~i (k p ve + k I ve )si − ve s − k1i si − k2i si Thus, we obtain n αˆ Va = −(k p + 1/ R)ve2 − ∑ [k1i si2 + k2i si + α i ((k p ve + k I ve )si − i )] λ1i i =1 n βˆ t =1 λ2 + ∑ [ β i ( − iLi si − i ) + γi ( − vo si − i γˆ λ3 )] (26) i Hence, we propose the following parameter adaptation laws αˆi = λ1i (k p ve + k I ve ) si λ1i > 0 βˆi = −λ2i iLi si λ2i > 0 γˆi = −λ3i vo si (27) λ3i > 0 Remark 2 The estimates αˆ i , βˆi and γˆi usually do not converge to their true values, except that the reference voltage meets the persistent excitation conditions, V. COMPUTER SIMULATIONS In what follows a Simulink program was developed to verify the effectiveness of the proposed control strategy. This simulation takes the parameters given in Table 1. For the following simulation, the reference output voltage was set at 5 Volts and the input voltage at 20 Volts. To simulate the input voltage variations and load changes, the input DC voltage was increased by 50% at the time interval [1,2] and [6,7], shown in Figure 2, respectively, and the load was changed by 33% ( iN from 3A to 4A) at the time interval [3,4], shown in Figure 3, respectively. Figs. 4, 5 and 6 illustrate the changes of the inductors of the three converters for the input voltage changes and load variations. We observe in Fig. 7 that the three converters have the same current loading distribution, and the total inductance currents of the circuit are equal to the sum of three individual inductance currents. Figs. 8, 9 and 10 depict the control duty ratios ( d1 , d 2 , d 3 ) for the converters in order to maintain the output voltage equal to the desired setpoint voltage. The output voltage responses of the DC-DC buck converter demonstrate excellent regulation performance even subject to sudden changes in input voltage and load. From Fig.11, the results indicate that small amount of voltage variations appear in the startup phase and these exponentially converge to zero when the load is abruptly changed. n such that V = −(k + 1/ R)v 2 − (k s 2 + k s ) ≤ 0 and Va ∑ 1i 2 i a p e i =1 is negative semidefinite. Again, Barbalat’s lemma implies that all the signal s, ve si αˆ i , βˆi and γˆi , are bounded and ve → 0 and si → 0 , for t → ∞ . This completes the proof of which the system is globally asymptotically stable. The following theorem summarizes the result. Theorem 1 Assume that the reference voltage v ref is constant, the parameters k p , k I , k1i , and k2i , i = 1,2,..., n , are positive gains. Then all the trajectories of the closed-loop error system composed of the system (13) (14) and the VI. EXPERIMENTAL AND DISCUSSION An experimental setup was constructed in Fig.12 in order to verify the proposed control method for the PWM buck DC-DC converter. The TMS320C542 DSP has been optimized for digital control system applications and has all the architectural features necessary for high-speed signal processing. The TMS320F542 DSP architecture was also used to implement the proposed control laws (22) and (23) with the parameter adaptation laws (27) using standard C programming techniques and related cross C compiler. Fig.13 shows the transient response of the output voltage Fig.2 waveform of the Input voltage vi was increased by 50% at the time interval [1, 2] and [6, 7], respectively. Fig.3 waveform of the adjustable current load iN was changed by 33% (from 3A to 4A) at time interval [3, 4]. Fig.4 Inductor current iL1 of the Parallel DC-DC buck converters in Fig.7 Load (Total) current iL of the parallel DC-DC buck converters in Fig.1 Fig.8 Duty ratio d1 of the parallel DC-DC buck converters in Fig.1 Fig.9 Duty ratio d 2 of the parallel DC-DC buck converters in Fig.1 Fig.1 Fig.5 Inductor current iL2 of the parallel DC-DC buck converters in Fig.10 Duty ratio d3 of the parallel DC-DC buck converters Fig.1 in Fig.1 Fig.6 Inductor current iL3 of the parallel DC-DC buck converters in Fig.1 Fig.11 Output voltage response of the parallel DC-DC buck converters in Fig.1 iL 1 r1 Power MOSFET NSC91-2622-E-005-008-CC3. io L1 iC1 rc1 REFERENCES Diode vi C1 vc1 iL 2 r2 io L2 Power MOSFET iM iC2 rc2 R Diode vi C2 Digital signal processor (DSP) TMS320C542 vo vc2 Current transducers (Hall element) TLP250 PWM iN ADS7805 vo iL 2 iL 1 Current transducers (Hall element) Fig.12 Control architecture of the proposed control method for the experimental parallel DC-DC buck converters 1 > 2 > 1) Ch 1: 2) Ch 2: 5 Volt 500 ns 2 Volt 500 ns Fig.13 Waveform of the output voltage set at 4 volts and the input voltage changed 5 volts. of the two parallel-buck DC-DC converters under load changes. The result in Fig. 13 indicates that the proposed method is capable of giving robust voltage regulation against load changes. VII. CONCLUSIONS This paper has proposed a novel adaptive backstepping sliding mode control to achieve voltage regulation and equal current distribution for parallel -buck DC-DC converters under input DC voltage variations and load changes. The controller design is accomplished based on the circuit’s averaged reduced order model in which the fast mode of the capacitor current is ignored. The resulting controller without adaptation behaves like an integral sliding mode controller, and does not have any numerical difficulties and stiffness caused by the fast mode of the capacitor current. The adaptive capability of the controller has a powerful strength to automatically tune its control parameters for buck DC-DC converters with unknown circuit parameters. Moreover, simulation and experimental results have shown that the proposed control method is proven capable of giving satisfactory voltage regulation performance under input voltage variations and load changes. ACKNOWLEDGMENT This study was supported by the National Science Council of the Republic of China under Grant [1] J.Ajagopalan, K.Xing,Y.Guo and F.C.Lee “Modeling and dynamic analysis of paralleled DC-DC converters with master-slave current sharing control” Applied power electronics conference and exposition,1996 APEC’ 96, conference Proceeding 1996 Eleventh Annual, vol.2, pp.678-684, Mar 1996 [2] J.W.Kim, H.S.Chio, and B.H.Cho, “A novel Droop method for converter parallel operation,” IEEE Transactions on power electronics, vol.17, no.1, pp.25 –32, Jan. 2002. [3] J.Banda, and K.Siri “Improved central-limit control for parallel operation of DC-to-DC power converters,” proc. of 1995 power electronics specialists Conference, 26th Annul IEEE, vol.2, pp.1104-1110, Jun. 1995. [4] K.Siri and C.Q.Lee, “Current distribution control of converters connected in parallel,” Industry Applications Society Annual Meeting, vol.2, pp.1274 –1280, 1990. [5] R.H.Wu, T.Kohama, Y.Kodera, T.Ninomiya and F.Ihara “Load current sharing control for parallel operation of DC-to-DC converters,” proc of 1993 power electronics specialists Conference,24th annul IEEE, pp.101-107. 20-24 Jun.1993. [6] Y.Panov, J.Rajagopalan, and F.C.Lee. “Analysis and design of N paralleled DC-DC converters with master-slave current sharing control,” APESC‘97 conference Proceeding 1997 Twelfth Annual, vol.1, pp.436-442, Feb.1997. [7] V.J.Thottuvelil, and G.C.Verghese, “Analysis and control design of paralleled DC-DC converters with current sharing,” IEEE Transactions on power electronics. vol.13, no.4 pp.635-644,Jul.1998. [8] P.F.Donoso-Garcia, P.C.Cortizo, B.R.Menezes and M.A.Severo Mendes, “Sliding-mode control for current distribution in parallel-connected DC-DC converters,” IEE Proceedings Electric Power Applications, vol.145, no. 4, pp. 333 –338, July 1998. [9] D.J.Perreault and J.G.Kassakian, “Distributed interleaving of paralleled power converters,” IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, vol. 44, no. 8, pp.728 –734, Aug. 1997. [10]Tymerski, V.Vorperian, Lee, and. W.T.Baumann “Nonlinear modeling of the PWM switch,” IEEE Transactions on Power Electronics, vol. 4, no.2, pp.225-233, April 1989. [11] V.Vorperian, “Simplified analysis of PWM converter using model of PWM switch part I: Continuous conduction mode,” IEEE Transactions on Aerospace and Electronic systems, vol.12, no.3, pp.490-496, May 1990. [12] J. Mahdavi, A.Emaudi, M.D.Bellar and M.Ehsani, “Analysis of power electronic converters using the generalized state-space averaging approach,” IEEE Transactions on Circuits and Systems, vol.44, no.8, pp. 767-770, Aug.1997. [13] S.C. Lin and C.C. Tsai, “Adaptive backstepping sliding mode control of PWM buck DC-DC converters,” proc. of 24th R.O.C electrical power engineering symposium, pp.739-743, Dec 2003. [14] R.Ghanadan, “Nonlinear control system design via dynamic order reduction” Proceedings of the 33rd Conference on Decision and Control, vol.4, pp.3752-3757 ,Dec. 1994. [15] X.Xu, et al. “Modeling of generators and their controls in power system simulations using singular perturbations” IEEE Transactions on Power Systems, vol.13, no.1, pp.109-114, Feb 1998. [16] K.J.Astrom and B.Wittenmark, Adaptive Control, 2nd Ed. Addison Wesley, 1995. [17] M.Krstić, I.Kanellakopoulos, and P.Kokotović, Nonlinear and Adaptive Control Design, John Wily and Sons,1995. [18] H. K. Khalil, Nonlinear Systems, 2nd Ed. Prentice Hall, 1996.