Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
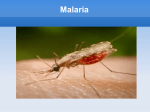
Int. Journal of Math. Analysis, Vol. 6, 2012, no. 38, 1877 - 1881 Global Stability for the Disease Free Equilibrium of a Delayed Model for Malaria Transmission Chunqing Wu1 and Zhongyi Jiang School of Mathematics and Physics, Changzhou University Changzhou, Jiangsu, 213164, China Abstract The global asymptotic stability for the disease free equilibrium of a mathematical model for malaria transmission with two delays is obtained by constructing appropriate Lyapunov functions. Mathematics Subject Classification: 34K20, 92B05 Keywords: Global asymptotic stability, Lyapunov function, Time delay, Malaria transmission 1 Introduction Malaria is a vector-borne infectious disease which is transmitted between human population by mosquitoes and is now endemic in over 90 countries including both tropical and subtropical regions, in which 40% of the world’s population live [1]. Malaria is caused by a parasite called Plasmodium, which is transmitted via the bites of infected mosquitoes. In the human body, the parasites multiply in the liver, and then infect red blood cells. Symptoms of malaria usually appear between 10 and 15 days after the mosquito bite [2]. R. Ross was the pioneer to establish mathematical models to understand the dynamics of malaria transmission quantitatively [3]. His basic model was extended by Macdonald [4], Anderson and May [5], Smith and McKenzie [6], Auger [7], Ruan et al.[1], etc. In [1], a delay differential equation system was established, which included two delays: one is to describe the considerable incubation time of the parasites in human body, and the other is to describe the incubation time in mosquito. Moreover, the basic reproduction number for the model was defined and the local stability both for the disease free and the endemic equilibrium of the 1 arnold [email protected] 1878 C. Q. Wu and Z. Y. Jiang model was discussed via the eigenvalues of the characteristic equation associated with the linearized system for the model. However, the global stability for the equilibria is not concerned in [1]. Global stability for the equilibria of a biomathematical model is often discussed in the literature [8]. Usually for mathematical models about infectious diseases, the disease free equilibrium is globally asymptotically stable when the reproduction number is less than 1, and the endemic equilibrium exists, which is globally asymptotically stable when the reproduction number is greater than 1 [9]. The aim of this paper is to prove the global asymptotic stability for the disease free equilibrium of the model established in [1] by constructing appropriate Lyapunov functions. 2 The model and Preliminaries The model considered for the transmission of malaria between human and mosquito in this paper is the following dx dt dy dt = −γx(t) + abm[1 − x(t − τ1 )]y(t − τ1 ) exp(−γτ1 ), = −μy(t) + acx(t − τ2 )[1 − y(t − τ2 )] exp(−μτ2 ). (1) In model (1), γ is the average per capita rate of recovery in humans, a is the bites of a single mosquito on human per day, b is the rate of infected bites that produces new infectious human individual, c is the rate of infected bites that produces new infectious mosquito, τ1 , τ2 is the incubation period of the parasite in human host and the vector mosquito, respectively, μ is the death rate of mosquito. It is assumed that the total populations of both human and mosquito in the considered region are constants, x(t) and y(t) are the proportion of infected humans and mosquitoes at time t, respectively, m is the number of mosquitoes per human. One can refer to [1] for more details of model (1). The initial values of model (1) is given by x(t) = φ(t), y(t) = ψ(t), t ∈ [−τ, 0], τ = max{τ1 , τ2 }, (2) where 0 ≤ φ(t) < 1, 0 ≤ ψ(t) < 1, t ∈ [−τ, 0) and 0 < φ(0) < 1, 0 < ψ(0) < 1, and both of φ(t), ψ(t) are continuous in the interval [−τ, 0]. The basic reproduction number of model (1) is defined by R0 = a2 bcm exp(γτ1 ) exp(μτ2 ) . γμ (3) The following theorem, which is obtained by direct computation, is about the equilibria of model (1). 1879 Global stability for equilibrium Theorem 2.1 In the planar domain G = {(x, y)|x ≥ 0, y ≥ 0}, one has, (i) if R0 ≤ 1, then model (1) has a unique disease free equilibrium E0 = (0, 0). (ii) if R0 > 1, then model (1) has two equilibria, the disease free equilibrium E0 and the unique positive equilibrium (endemic equilibrium) E ∗ = (x∗ , y ∗) where a2 bcm exp(−γτ1 ) exp(−μτ2 )−γμ R0 −1 x∗ = ac = R0 +ac exp(−μτ , exp(−μτ2 )(abm exp(−γτ1 )+γ) 2 )/μ (4) 2 a bcm exp(−γτ1 ) exp(−μτ2 )−γμ R0 −1 ∗ y = abm exp(−μτ2 )(ac exp(−μτ2 )+μ) = R0 +abm exp(−γτ1 )/γ . 3 Main Results In this section, we first denote Ω = {(a, b, c, m, γ, μ, τ1 , τ2 )|such that the solutions of (1) with initial values (2) are positive}. (5) Followed, the main results on the global asymptotic stability for E0 in Ω are given by Theorem 3.1 If R0 < 1, then the disease free equilibrium E0 is globally asymptotically stable in Ω. Proof. For simplicity, we denote α = exp(−γτ1 ) and β = exp(−μτ2 ). Note that R0 = abmα acβ a2 bcm exp(−γτ1 ) exp(−μτ2 ) = · , γμ γ μ there are three cases corresponding to R0 < 1: abmα Case 1 < 1, acβ < 1; γ μ Case 2 abmα γ > 1, acβ μ < 1; Case 3 abmα γ < 1, acβ μ > 1. Next we prove that the disease free equilibrium E0 is globally asymptotically stable under these three cases by constructing appropriate Lyapunov functions. Case 1. The following function V1 (t) = t t 1 1 abmα acβ x+ ydt + y + xdt, γ γ μ t−τ1 t−τ2 μ 1880 C. Q. Wu and Z. Y. Jiang is positive definite in Ω. Further, calculating the differentiate of V1 (t) along the solution of model (1), we have dV1 (t) dt = −x + abmα (1 − x(t − τ1 ))y(t − τ1 ) + abmα y − abmα y(t − τ1 ) γ γ γ acβ acβ acβ −y + μ (1 − y(t − τ2 ))x(t − τ2 ) + μ x − μ x(t − τ2 ) = −x − abmα x(t − τ1 )y(t − τ1 ) + abmα y γ γ acβ acβ −y − μ y(t − τ2 )x(t − τ2 ) + μ x acβ − 1 y + − 1 x < abmα γ μ < 0. Therefore, the disease free equilibrium E0 is globally asymptotically stable in Ω. Case 2. Constructing the following function acβ 1 γ 1 V2 (t) = · x+ · y+ abmα μ μ abmα t t−τ1 γ ydt + abmα t t−τ2 γ acβ · xdt, μ abmα and calculating the differentiate of V2 (t) along the solution of model (1), we have dV2 (t) dt γ = − abmα · acβ x + acβ y(n − τ1 ) − acβ x(t − τ1 )y(t − τ1 ) + μ μ μ γ acβ γ acβ γ x(n − τ2 ) − abmα · μ x(t − τ2 ) − abmα y + μ · abmα acβ γ γ γ y(t − τ1 ) − μ · abmα x(t − τ2 )y(t − τ2 ) + abmα y − abmα acβ acβ γ = − μ x(t − τ1 )y(t − τ1 ) − μ · abmα x(t − τ2 )y(t − τ2 ) γ + acβ − abmα y(t − τ1 ). μ γ abmα · acβ x μ γ Note that R0 = acβ · abmα < 1, hence, acβ < abmα which yields dV2 (t)/dt < 0. μ γ μ Again the disease free equilibrium E0 is globally asymptotically stable in Ω. Case 3. Constructing the following function V3 (t) = 1 abmα 1 μ · x+ · y+ γ acβ acβ γ t t−τ1 abmα μ · ydt + γ acβ t t−τ2 μ xdt, acβ and calculating the differentiate of V3 (t) along the solution of model (1), we have dV3 (t) dt μ μ μ = − acβ x + acβ · abmα y(t − τ1 ) − acβ · abmα x(t − τ1 )y(t − τ1 ) γ γ μ μ μ abmα abmα y + abmα x(t − τ2 ) + acβ · γ y − acβ · γ y(t − τ1 ) − acβ · abmα γ γ μ μ abmα − γ x(t − τ2 )y(t − τ2 ) + acβ x − acβ x(t − τ2 ) μ · abmα x(t − τ1 )y(t − τ1 ) − abmα x(t − τ2 )y(t − τ2 ) = − acβ γ γ μ + abmα − acβ x(t − τ2 ). γ μ Note that R0 = acβ · abmα < 1, therefore, abmα < acβ which yields dV3 (t)/dt < 0. μ γ γ The disease free equilibrium E0 is also globally asymptotically stable in Ω. Thus completes the proof of Theorem 3.1. Global stability for equilibrium 1881 ACKNOWLEDGEMENTS. This work is supported by the National Natural Science Foundation of China (No. 11071011), the Qing Lan Project of Jiangsu Province (QLG1102002) and the Foundation of Changzhou University (czupy1002). References [1] S.G. Ruan, D.M. Xiao and J.C. Beier, On the delayed Ross-Macdonald model for malaria transmission, Bull. Math. Biol., 70 (2008), 1098 - 1114. [2] World Helth Organization, World malaria report 2008, http://malaria. who.int/wmr2008. [3] R. Ross, The prevention of malaria, 2nd edition, Lodon, Murray, 1911. [4] G. Macdonald, Epidemiological basis of malaria control, Bull. World Health Organ., 15 (1956) 613 - 626. [5] R.M. Anerson and R.M. May, Infectious diseases of human: dynamics and control, Oxford University Press, 1991. [6] D.L. Smith and M.E. McKenzie, Statics and dynamics of malaria infection in Anopheles mosquitoes, Malaria J., 3 (2004) 13. [7] P. Auger, et al, The Ross-Macdonald model in patchy environment, Math. Biosci., 216(2) (2008) 123 - 131. [8] A. Korobeinikov and G.C. Wake, Lyapunov functions and global stability for SIR, SIRS, and SIS epidemiological models, Appl. Math. lett., 15 (2002) 955 - 960. [9] P.Van den Driessche and J. Watmough, Reproduction numbers and subthreshold endemic equilibria for compartmental models of disease transmission, Math. Biosci., 180 (2002) 29 - 48. Received: March, 2012