Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
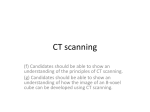
CHAPTER III SIMULATION OF MRI IMAGES Comparisons of registration and segmentation algorithms for magnetic resonance imaging (MRI) require gold standard image sets that reflect a wide variety of acquisition protocols and must include correctly segmented anatomy. Segmentation of clinical images requires many hours of expert time, is rarely precise, and is infeasible for large image sets. Simulated MR images provide a partial solution to these problems. Similarly, simulated images may be used to aid in the development and verification of new pulse sequences and postprocessing algorithms, such as distortion correction algorithms, by providing an environment in which all variables are easily controlled. Simulated images model reality. However, the extent of this model should not be oversimplified and sacrifice the desired behavior. With this in view, we have developed a new MR simulator that includes the full effects of static field inhomogeneity. In contrast to previous MRI simulators (e.g. [105-111]), this system generates object-specific inhomogeneity patterns from first principles and propagates the consequent frequency offsets and intravoxel dephasing through the acquisition protocols to produce realistic images. 3.1. Methods The simulator is divided into two separate parts and each part is presented separately below. 3.1.1. Simulation Part 1: Static field perturbation The magnetic field that an object experiences during MRI is a consequence of the nominal (imposed static) B field, the applied gradients, the RF field, and the magnetic susceptibility distribution of the object placed in the magnetic field. Differences in magnetic susceptibility between various tissues, in particular between tissue and air, lead to variations in the induced magnetic field and are one of the greatest sources of geometric distortions in magnetic resonance imaging. If the resulting perturbed field is known, the information can be used to rectify the images [19, 80, 87, 112]. Magnetic shimming creates a more homogeneous field, but is unable to compensate for abrupt inhomogeneities caused by the susceptibility differences between the object and air. Methods exist to calculate the perturbation of the field caused by the magnetic susceptibility of an object placed in a static field. These methods can be separated into two categories, post-scanning and predictive. Post-scanning methods typically require two separate scans of the same object. In [19], for example, the readout gradient is reversed in the second scan; in [80] the echo time is changed. Each method not only accounts for variations in the field caused by the object, but also includes inhomogeneities caused by imperfections in the static field. Although post-scanning methods can be used to calculate the resulting field, for our simulator we need to be able to predict the perturbed field based on the susceptibility and shape of the object. Analytic predictive methods exist for simple geometries, such as cylinders and spheres [17, 113]. However, for more complex geometries, numerical methods must be utilized. Methods such as multipole expansions using spherical harmonics [114], finite difference [115-118], and finite element methods [119, 120] are available, where the latter two are computationally expensive. The perturbation method [121], boundary element method [122-124], Fourier based dipolar method [125], and scalar multipole expansion provide more computationally friendly approaches. Noting that models of a real object must be obtained from tomographic images, which provide a voxel-based description of an anatomic volume, we sought a method that works directly with that description. We developed such a method by applying the boundary element method to that geometry. We take advantage also of the fact that the form of the magnetic field calculation is equivalent to spatial convolution. By combining analytic integrations with discrete summations, we are able to cast the calculation as a discrete convolution with voxels whose values are equal to susceptibilities. We call the resulting method, “Susceptibility-Voxel Convolution” (SVC). We note that multipole expansion also lends itself to the voxel description, but because both quadrapoles and octapoles are identically zero for objects of voxel shape, that method requires expansion beyond octapoles, which add considerable computational complexity. We implemented both SVC and multipole expansion and found that SVC proved to be more efficient. We present that method below. 3.1.1.1. Magnetic theory & the boundary element method For linear magnetic materials, M = cH B = m0 (H + M) = mH m = m0 (1 + c ) (1) (2) (3) where M is the magnetization (Tesla), B is the magnetic induction (Tesla), H is the magnetic field intensity (Tesla), m0 is the magnetic permeability of vacuum, m and c are the magnetic permeability and susceptibility of the material; m0 , m , and c are dimensionless. Given the absence of current or charges, Maxwell’s equations are: Ñ´ H = 0 Ñ ×B = 0 (4) (5) Because of Eq. (4), we can introduce a magnetic scalar potential F such that: H = - ÑF (6) From Eqs. (2) and (6) the magnetic induction is: B = m[- ÑF ] (7) Ñ ×(mÑF ) = 0 (8) Hence, Eq. (5) can be written as: We define F 0 = F when c = 0 everywhere and define F P = F - F 0 to be the perturbation potential caused by nonzero c . Then per Eqs. (3) and (8), Ñ ×((1 + c )ÑF P ) = - Ñ ×((1 + c )ÑF 0 ) (9) In [122], de Munck et al. showed that, given the assumption that the object consists of compartments of independent and constant susceptibility, F p (x ) satisfies the following equation: 4p(1 + c +j + c -j )F P ( x) = 2 æ 1 1 ö ÷ çç ( c k+ - c k- ) ò Ñ ¢F 0 + F P ( x ¢)Ñ ¢ ×dS¢ ÷ Ñ ÷ ÷ ç ¢ ¢ Sk è x x x x ø k=1 K å (10) Here k enumerates K closed surfaces, c +j and c -j are the susceptibilities outside and inside the jth surface, and x ¢ represents a surface point. Solving the resulting system of differential equations can be computationally expensive, but as de Munck suggested, since typical values of c in MR applications are < 10- 5 , higher order terms can be neglected, leading to the simpler form, K F P (x) » 1 1 Dc k ò ÑSk x - x ¢ Ñ ¢F 0 ×dS¢ 4p kå= 1 (11) where D c k = c k+ - c k- . We define B 0 = B when c = 0 and define the perturbation field B p = B - B0 . Then, per Eqs. (3) and (7), B = B0 + c B0 - m0ÑF P - m0c ÑF P . Using Eq. (11) and dropping higher order terms in c yields: K B p ( x) » c B 0 + 1 1 Dc k Ñ ò B0 ×dS¢ å Ñ S k x ¢- x 4p k = 1 (12) Applying the gradient function in Eq. (12) results in the following: 1 x ¢- x = x '- x x '- x 3 (13) where x ¢ and x correspond to a surface and the point in question, respectively. Furthermore, the main contribution of distortions in MR images is along the axis parallel to the impressed static field, which we are specifying as the z-axis. Using Eq. (13) and keeping only the z-component simplifies Eq. (12) to the following: K B p ( x) » c B 0 + 1 Dc k 4p kå= 1 òÑS k z ¢- z B ×dS¢ 3 0 x ¢- x (14) The field given by Eq. (14) neglects an effect known as the “Lorentz correction” [113]. This correction accounts for the discrete nature of the medium of molecules in which a spin is immersed, which is ignored by our continuous derivation. This effect can be accounted for by subtracting 2/3 c B0 from the right side of Eq. (14). 3.1.1.2. The Susceptibility-Voxel Convolution method Previous work using the boundary element method [122-124] used triangulation to represent the surface. As mentioned above, we sought a method that can be applied directly to a voxel description of the object under consideration. Thus, we make the assumption that the object is represented by a set of hyperrectangular voxels each of which is a homogeneous distribution of susceptibility. We show in this section that B p can then be calculated by convolving these “susceptibility voxels” with a special kernel. As noted earlier, we call the calculation “Susceptibility-Voxel Convolution” (SVC). With this representation, all surfaces are either parallel or perpendicular to the static field, B 0 . Therefore, the resulting dot product between B 0 and dS is either zero or ± 1 . Each voxel has two surfaces perpendicular to the static field, which also coincide with the respective surfaces of the upper and lower neighboring voxels. The superposition principle enables us to use each coincident surface only once in the calculation. We use the upper surface (i.e., larger z) as the associated surface of each voxel. Then D c k = c v + - c v , where c v + is the upper voxel and c v is the “current” voxel. Now Eq. (14) with the Lorentz correction becomes: K éc ù yk + ly 2 x k + lx 2 1 - 3 B p ( x) » B 0 êê + (z k + lz / 2 - z )D c k ò x ¢- x dx ¢dy ¢ú å ò ú yk - ly 2 x k - lx 2 ë3 4p k = 1 û (15) where (x k , yk , z k ) is the center of voxel k and lx, ly, and lz are the x, y, and z dimensions of a voxel. (Appendix A shows the result of the integration.) To calculate the perturbation of the field for a particular object, we have assumed that the object comprises a set of voxels with known susceptibilities for each voxel. For voxels composed of multiple tissues we assume each tissue homogeneously occupies the voxel and we take advantage of the superposition principle of magnetism. This principle enables us to determine the net susceptibility of a voxel, c v , by the following: cv = 1 N N å i= 1 fi c i (16) where N is the number of tissue types, fi is the fraction of tissue type i contained in the voxel, and c i is its corresponding susceptibility. This principle allows us to use more complete phantom definitions such as the 3D digital brain phantom introduced by the McConnell Brain Imaging Centre, Montreal Neurological Institute, McGill University [126]. That description comprises a set of ten files that give the tissue components, e.g. fat, white matter, csf, bone, etc. within each voxel, where each voxel may contain one or more tissue types. (See Appendix B for further details.) With the susceptibility of each voxel specified, the calculation of B p is now straightforward using Eq. (15). However, the calculation is computationally expensive. Given a 3D object of size N, where N is the total number of voxels, the time required to compute the perturbation for the entire object is O(N2). Fortunately, Eq. (15) is a discrete convolution. Therefore, the computation can be improved to O(N log N) by means of the fast Fourier transform. We can build the following convolution kernel: K (x k - x , y k - y , z k - z ) = (z k + lz / 2 - z )ò yk + ly 2 y k - ly 2 x k + lx 2 òx - l 2 [(x ¢k - 3 x )2 + (y ¢- y )2 + (z k + lz / 2 - z )2 ] dx ¢dy ¢ (17) x Eq. Error! Reference source not found. in Appendix A shows that Eq. (17) depends only on x k - x , y k - y, z k - z , lx , ly , and lz . We suppress the lx , ly , and lz dependence and define D(i, j , k ) = dl ¢l dm ¢m dn ¢n / 3 + (K (i, j, k ) - K (i, j, k + 1)) / (4p) , where dij = 1 for i = j and 0 otherwise. Then the convolution in discrete terms becomes, B p (l, m , n ) = B0 å c (l ¢, m ¢, n ¢)D(l ¢- l, m ¢- m , n ¢- n ) (18) l ¢m ¢n ¢ where l , m , and n are the discrete indices of the x , y , and z dimensions. Eq. (18) is SVC, and c (l ¢, m ¢, n ¢) is the susceptibility voxel. Thus, the perturbed field for the entire volume is given as follows: B p = B0 c * D = B0Á- 1(Á( c )Á(D )) (19) where * is the convolution operator and Á represents the Fourier transform. The first of these two equations shows that the calculation of static field perturbation may be accomplished for an object described in terms of voxels by assigning the value of each voxel to be the susceptibility at that point and convolving with D. The second shows that SVC may be performed efficiently by means of the fast Fourier transform. It is important to note that Eq. (19) is exactly equivalent to Eq. (12), given the voxel model of the object that is perturbing the field. 3.1.1.3. Implementation The core of the SVC method was implemented in Matlab 6.1 (Mathworks, Inc., Natick, MA) and calculations were performed on a 1.5GHz Pentium 4 with 256MB of memory. Although the convolution in Eq. (18) may be performed by a 3D fast Fourier transform, as shown in Eq. (19), our memory limitations prevent it for volumes over 200,000 voxels. However, the convolution may be performed on a slice-by-slice basis by the summation of a series of 2D fast Fourier transforms. Therefore, we implemented both a 2D and 3D version. 3.1.2. Simulation Part 2: Signal and image generation Many MR simulators have been constructed by various research groups [105-111]. The purpose of our simulator, which is based on solutions of the Bloch equations, is to provide a more complete testing platform for MR distortion correction algorithms, in particular, by providing realistic distortions resulting from static field inhomogeneity. Initial simulators used the Bloch equation as their basis [105-107], evaluating the equation at every voxel in the defined object. This approach is computationally expensive for large objects, but lends itself to distributed implementation [108]. Other optimizations have been explored including those using a k-space formalism [109] and tissue templates [110]. These methods provide faster signal generation, but lack general representation of MR phenomenon. A hybrid approach was developed by [111, 127] which combines the speed of templates along with modeling provided by the Bloch equation offering a simulator providing fast image generation useful for image analysis methods. However, this method cannot account for inhomogeneities and thus does not provide image artifact generation. Our simulator is based on the Bloch equation and is designed with the goal of accurate image and artifact generation. By including object-specific inhomogeneities, along with static field errors, chemical-shift, and intravoxel dephasing applied throughout the acquisition protocols, images with realistic artifacts from static field inhomogeneity are produced. 3.1.2.1. Theory The Bloch equation gives the rate of change of a magnetic moment, M = M x , M y , M z , in a magnetic field, B , at time t , (M x i + M y j) (M z - M 0 )k dM = g( M ´ B) , dt T2 T1 (20) where T 1 and T 2 are the relaxation times and M 0 is the magnetization at equilibrium. The solution to Eq. (20) for constant B is as follows: M x (t ) = e - t T2 M y (t ) = e (M x 0 cos( w0t ) - M y 0 sin( w0t )) - t T2 M z (t ) = M z 0e (M x 0 sin( w0t ) + M y 0 cos( w0t )) - t T1 + M 0 (1 - e - t T1 (21) ) where w0 = - gB is the Larmor frequency of the system, and Mi 0 is the initial magnetization. The gyromagnetic frequency, g , is approximately 42.58 MHz/T for hydrogen. There are basically two ways the precession of the magnetic moments is purposely perturbed. One is the application of static-field gradients along one of the three orthogonal axes, and the second is the application of an RF pulse. Gradient applications affect the precessional frequency as a function of position, while RF pulses affect the axis about which the magnetization vector precesses. During the application of a constant gradient, the solution to the Bloch equation is not changed from that of Eq. (21) except that w0 is replaced with the new precessional frequency w ¢( x) = - g( B 0 + G ×x) , where G = Gx ,Gy ,Gz is the static-field gradient. Furthermore, inhomogeneities can easily be included by adding wp ( x) to w ¢( x) where wp ( x) = gB p ( x) . During an RF pulse, the field is B(t ) = B + B1(t )[cos( wt )i + sin( wt ) j] (22) We assume the RF pulse is short (1 ms or less) compared to the relaxation times and can be modeled by a sequence of constant pulses. If no gradients are active, then an analytic solution to the Bloch equations during an RF pulse may be obtained [128]. Within a rotating frame of reference, x ¢, y ¢, z ¢ for which z ¢ = z and which rotates at the Larmor frequency about z, the analytic solution is: M x ¢(t ) = M x ¢(0) M y ¢(t ) = M y ¢(0) cos( w1t ) - M z (0) sin( w1t ) (23) M z ¢(t ) = M y ¢(0) sin( w1t ) + M z (0) cos( w1t ) where the magnetization vector rotates around the x ¢ axis at the angular frequency w1 = - gB1 . However, given active gradients, numerical methods must be utilized. Although, B p may affect Eq. (23), we assume in our present experiments that the effects are inconsequential. To take advantage of the computational savings afforded during an RF pulse, we use Eq. (23) when gradients are inactive and resort to numerical methods only when they are active. 3.1.2.2. Spin modeling The sampled signal at any moment in a scanner is the sum of the signals from all active spins. In our formulation the collective signal is the sum of all the magnetization vectors that are defined for each voxel. Given the discrete nature of the representation, it is important that the vector in each voxel correctly model the entire voxel. The magnetization vector at the center of a voxel does not correctly model the entire voxel. For example, modeling a single spin will not model stimulated echoes. A set of magnetization vectors uniformly distributed across a voxel will more accurately model the changes across a voxel. However, with each additional evolving vector the amount of computation time increases, because the status of every magnetization vector representing the object must be calculated. Dephasing that occurs across a voxel affects the length of the magnetization vector when averaged over the voxel. If we assume a linear change across the voxel with gradient gx , gy , gz , the amplitude of the magnetization in the transverse plane can be computed by Eq. (46). Here Mxy represents the magnitude of magnetization in the xy-plane. M xy ,dephasing (t ) = M xy (t ) 1 lx ly lz lz 2 - lz 2 ly 2 - ly 2 lx 2 - lx 2 ò ò ò e i gt (gx x + gy y + gz z )dxdydy = 2M xy (t ) sinc( gtgx lx / 2)sinc( gtgy ly / 2)sinc( gtgz lz / 2) (24) Both the applied gradients and magnetic susceptibility contribute to the dephasing that occurs in a voxel. We handle intravoxel dephasing due to susceptibility by assuming a linear change in B p from the centers of each of its 6-connected neighbors. Thus, gi = G i + 1 (B - B in )/ li 2 ip (25) where G i is the applied gradient along the i axis and B ij is the value of B p at the positive neighbor, j = p , or the negative neighbor, j = n . The amount of dephasing is an accumulated effect and, given the appropriate pulse sequence, the spins may rephase, e.g. during a spin-echo sequence at TE. To correctly account for the effect of dephasing on the signal contribution from each magnetization vector, the transverse magnetization M xy (t ) decays according to the time constant T2 over the length of the TR. However, during each sample time the signal generated from a magnetization vector is adjusted by Eq. (24) to account for the dephasing effects of field inhomogeneities, whether intentional (i.e., applied gradients) or not. 3.1.2.3. Input/Output The input into the MR simulator consists of the object definition, object-specific inhomogeneities, applied static field errors, chemical shift values, and a description of the acquisition protocol. The object definition comprises every voxel’s T1, T2, spin density, and frequency offset = g B p values. We assume that each tissue component is homogenously spread throughout each voxel. With the potential for a voxel to be composed of multiple tissues, the total signal from each voxel is calculated by treating each tissue component separately in the signal generation process and then combining the signal based on the percentage of the voxel occupied by the tissue. Keeping the signal computation separate for multiple tissue types within one voxel until the end allows for accurate computation of effects like fat/water cancellation. The acquisition protocol is defined by specifying the RF pulse(s), the time dependence of the gradients along each axis, sample times, and the repetition time. The pulse sequence is specified via file input where the RF pulse(s) are defined by the start time, flip angle, the duration of the pulse, and the axis about which to rotate. The gradients are specified by the start time, duration, and amplitude; readout is defined by the start time, number of samples, and sampling frequency. We assume the RF pulse is constant although the simulator may be adapted to model varying RF pulse shapes by a sequence of constant pulses, thus requiring changes to the RF specification. We currently ignore RF inhomogeneity and gradient non-linearity. Therefore, the simulator produces distortions due only to static field inhomogeneity. The inhomogeneity generated using Part 1 of the simulator is specified as a frequency offset per Tesla on a voxel-by-voxel basis with the variations in the nominal field and object specific inhomogeneities being additive. We assume time-independent inhomogeneities. Therefore, the effects of eddy currents currently are not modeled. Chemical shift, similarly specified as a frequency offset for a particular tissue type, is added to the inhomogeneity offset. The output of the simulator is a time sequence of complex numbers that are organized into k-space, and optionally, an image produced by means of a Fourier transform. 3.1.2.4. Implementation The simulator was implemented on the PC platform using Microsoft Visual C++ 6.0. Although there is graphical user interface available, dependent on Visual C++ objects, the core of the simulator can be compiled on other architectures. The implementation of Part 2 consists of three main objects: the object definition, the event sequencer, and the simulator. The object definition and event sequencer were defined in Section 2.2.3. The simulator is responsible for executing the pulse sequence, solving the Bloch equations to update each magnetization vector, and storing data during signal readout. Simulators based on the Bloch equation are computationally expensive, because every magnetization vector must be updated for every defined event. The bulk of the calculation time is dictated by signal readout, because for each of the readout samples every magnetization vector must be updated. Thus, the calculation time is O((L+M)N), where N is the number of magnetization vectors, which in our implementation equals the number of voxels defining the object, and M is the number of readout samples needed to fill k-space. Note that M and N do not necessarily have to be equal. The other L events specify changes in RF and the gradients. Typically, M >>L. A few minor optimizations can be performed, but the calculation time will always be O((L+M)N). A few simple optimizations have been included. 1) Only the signal producing magnetization vectors are updated. 2) The magnetization vectors are updated only during event changes. 3) Each event updates the entire set of magnetization vectors, and values such as relaxation rates are consistent throughout homogeneous portions of the object. Therefore, we take advantage of this to optimize calculations where possible. Other simulators have included optimizations such as representing the magnetization vectors by cylindrical coordinates. This does afford some savings but the cylindrical coordinates must be changed to real and imaginary values, involving expensive sine and cosine calculations at readout. With the signal readout being the largest portion of a pulse sequence, we found these savings were overall minimal. Therefore, we individually update each component of the magnetization vector throughout the entire pulse sequence. 3.2. Results Results for both parts of the simulator are presented below. 3.2.1. Part 1: Static field perturbation We validated SVC with both simulations and phantoms. 3.2.1.1. Simulations SVC was validated against the known analytic solution for a sphere. The magnetic field for a sphere placed in the static field B0 in the z-direction with Lorentz correction is as follows: ( Bi » B0 1 + ce 3 ) æ (c - c i )(x 2 + y 2 - 2z 2 ) ö c ÷ ÷ Be » B0 ççç1 + e + R 3 e ÷ 2 2 2 52 ÷ 3 çè 3(x + y + z ) ø (26) (27) where c i and c e are the internal and external susceptibility respectively, and R is the radius of the sphere. B p was calculated using SVC for a sphere of water of radius 32 mm placed in air in a static field of 1.5 Tesla. Figure 1 shows the perturbation of the field along orthogonal lines through the center of the sphere. The small, erroneous peaks at the boundaries of the sphere are an artifact of our approximation of the smooth sphere in terms of discrete rectangular voxels. A similar effect was noticed near a planar surface that was perpendicular to B 0 in [122, 125]. This effect is smaller for smaller voxels. Figure 2 shows the perturbation field for the xy-plane through the center of the previously described sphere. Figure 3 shows two orthogonal slices of the perturbation field calculated with the Montreal phantom with Lorentz correction applied while ignoring effects outside the FOV. The Montreal description provides each tissue’s associated T1, T2, and spin density values, however, no susceptibility values are specified. The susceptibility for some tissues, but not all of the Montreal tissue types, is available from previous literature [80, 129, 130]. For tissues with an unknown susceptibility, we use the susceptibility of water. (See Appendix B for the tissue parameters used.) Figure 1. The perturbation of the field along two orthogonal scan lines through the center of a sphere of water, c = - 9.05 ´ 10- 6 , of radius 32mm in a 1.5 T static field. Position 0 represents the center of the sphere. The analytic and SVC solutions are represented by solid and dashed lines, respectively. (a) The perturbed field along the z axis. The maximum error is 0.3 ppm. (b) The perturbed field along the x or y axis. The maximum error is 0.15 ppm. Figure 2. The perturbed field calculated by SVC for the xy-plane through the center of a sphere of water, c = - 9.05 ´ 10- 6 , of radius 32mm surrounded by air in a 1.5 T static field directed upward as indicated by the arrow. The range is from –7.8 ppm (black) to 4.5 ppm (white). Lorentz correction was applied. The perturbation inside the sphere is 0 as expected. (a) (b) Figure 3. The perturbed field calculated by SVC for two slices of the Montreal brain phantom with a static field of 1.5T directed upward as indicated by the arrow. The data is scaled from the most negative (black) to the most positive (white) perturbation. (a) Coronal slice 5 cm from the back of the head. The range is from –6.4 ppm to 2.7 ppm (b) Sagittal slice 2.5 cm to the left of the midplane. The range is from –8.5 ppm to 4.0 ppm. Figure 4. A diagram of the “sinus” phantom constructed to model air/tissue interfaces. Each cylinder was filled with air with the remainder of the phantom containing distilled water. The width, depth, and height of the phantom are 12 cm, 6.6 cm, and 5.2 cm, respectively. As seen in the coronal slice in Figure 3 (a), the spherical nature of the head produces a perturbation outside the head similar to that of the region outside the sphere, as seen in Figure 2. The resulting perturbation field of the sagittal slice, Figure 3 (b) agrees with the general form observed in other studies [116, 118, 120, 129, 131]. 3.2.1.2. Phantoms Further validation was performed by comparison with experimental data on two phantoms: an Erlenmeyer flask and a “sinus phantom”, consisting of a plastic rectangular dish with three cylindrical air tubes depicted schematically in Figure 4. Both phantoms were filled with distilled water. The second phantom provides a model of an air/tissue interface like that found near a sinus. The field map of each phantom was measured experimentally using a 2D fast asymmetric spin-echo sequence (FASE) [75]. This sequence offsets a gradient echo by a time difference, D T E , from the spin echo. A series of 10 FASE images were acquired, differing only in D T E . For every voxel inside the phantom, the local resonance frequency, B p , was calculated by linearly fitting a line to the unwrapped phase of the signal in a least squares sense. The slope of this line represents the local field inhomogeneity. The experimental field map of each phantom was acquired using the above method on a GE Signa VH/i 3.0T (GE Medical Systems, Waukesha, WI) scanner with the following parameters: TE=21ms, D T E =0.2 ms, TR=2 seconds with an echo train length of 16. The matrix size was 256x256 with a 24 cm field of view and a 3 mm slice thickness for the Erlenmeyer flask, whereas a 20 cm FOV was used for the sinus phantom. To optimize the B 0 homogeneity, shimming was performed on a 24 cm diameter spherical water phantom within a birdcage head coil. The shimming was performed on the spherical phantom given its field perturbation is zero inside. After shimming, the field of the spherical phantom was measured and was found to have a deviation of 0.08 ppm near the center, while a maximum deviation of 0.95 ppm occurred near the edge of the sphere. After optimizing the existing field of the sphere, and then replacing the sphere with a phantom, the field map of each phantom was acquired using the same shim settings. The phantom centers were aligned as best as possible with the sphere center so as to minimize the impact of the field deviations near the boundary of the sphere. A voxel-based representation of the Erlenmeyer flask was constructed from the MR images and physical measurements of the phantom, so as to include the Pyrex® in the voxelbased model. This model consisted of 139x85x85 cubic voxels whose sides were 0.9375 mm. Each voxel was solely represented as air ( c = 0.36 ´ 10- 6 ), Pyrex® ( c = - 13.88 ´ 10- 6 ), or water ( c = - 9.05 ´ 10- 6 )[130]. The applied field was perpendicular to the long axis of the flask. To account for a constant offset caused by the central frequency used when calculating the a b c d Figure 5. The perturbation of the field as determined by (a) experiment and (b) SVC. (c) Subtraction image (b) – (a). The range of (a) - (c) is from –1.8 ppm (black) to 0.9 ppm (white). (d) Subtraction image (b)-(a) with the range changed to highlight differences. The range is from –0.32 ppm (black) to 0.44 ppm (white). The average absolute error is 0.063 ppm. B 0 is perpendicular to the long axis, going into the page. experimental field map, a constant offset was added to the SVC to minimize the absolute difference between each method. Figure 5 shows the perturbation of the field along corresponding slices through the center of the flask. The comparisons were necessarily limited to the signalgenerating region of the experimental method. The average absolute error between measured and calculated fields within these slices is 0.063 ppm. As expected, the largest error (0.44 ppm) occurs near the glass/water interface. The comparison of the central scan line, Figure 6, gives an indication of the accuracy of the method in regions distant from interfaces. A similar comparison was made with the sinus phantom, where a 164x94x69 voxel-based representation was constructed from measurements of the phantom, where each cubic voxel measuring 0.78125 mm on a side was assumed to be only air or water. The susceptibility of plastic was assumed to be near that of water. Therefore, the plastic in the phantom was modeled as water. Geometric distortions are visible near the air/water interface in the experimental field map as shown in Figure 7 (a). Therefore, for a more viable comparison between the two methods, the calculated map was distorted using Eq. (50) below. The FASE sequence used to generate the field map constrains the major geometric distortions to be directed along the frequency-encoding gradient, which we specify as the x direction. The following equation: x1 = x + D B (x , y ) Gx (28) Figure 6. The perturbation in the field along the central axis of the Erlenmeyer flask. The analytic and SVC solutions are represented by solid and dashed lines, respectively. The plot is from the top (left) to the bottom (right) of the flask. The maximum error of 0.24 ppm occurs in the “neck” of the flask. (a) (b) (c) (d) Figure 7. The perturbed field (a) measured by experiment and (b) calculated by SVC. The range of (a) and (b) is from –2.95 ppm (black) to 5.3 ppm (white). (c) Subtraction image (b)-(a). The range is from -5.3 ppm (black) to 5.3 ppm (white). The average absolute error is 0.16 ppm. Note: There are regions where the experimental and the distorted SVC field map do not intersect (e.g. around the air cylinders) due to the peaks at air/tissue interfaces in the calculated map affecting the amount of distortion when Eq. (28) is applied. Therefore, (d) is included to eliminate these differences. (d) Subtraction image (b)-(a) in intersecting non-air regions. The range is from –1.31 (black) to 1.32 (white) ppm. Note: The lines on (b) indicate the placement of the scan lines in Figure 19. gives the magnitude of the distortion, where x is the original position, D B (x , y ) the perturbed field at (x , y ) , and x1 is the distorted position. Figure 7 shows the perturbation of the field along corresponding slices through the center of the sinus phantom. Figure 19 shows several corresponding scan lines from each corresponding slice. There are notable increases in the average absolute error, 0.16 ppm, and the largest error, 1.32 ppm, between the methods. This increase should come as no surprise, given the increase in air/tissue interfaces throughout the phantom. Also, given the relatively small diameter of the cylinders, there is a more pronounced pixelation effect from the discrete representation of the cylinders, further contributing to the erroneous peaks at the air/tissue interfaces. The latter effect contributes to the larger arrowhead patterns seen upon distorting the numerically calculated field, Figure 18 (c). There are other minor differences throughout the field, which may be a consequence of the unknown susceptibility of the plastic. A few other susceptibility values of plastic were used in the numerical method, but none improved the minor differences seen. 3.2.1.3. Computational time The calculation of the perturbed field for both the Erlenmeyer flask and the sinus phantom using the 2D version takes approximately 35 minutes on the system described in Section 2.1.3, while 10.5 hours are required for the 181x217x181 1 mm3 voxels of the Montreal phantom. A decrease in resolution can improve the efficiency. For example, the calculation time improves to approximately 5 minutes, using the 2D method for a 64x64x64 volume. Further improvements are possible provided a 3D calculation may be performed. Given a 32x32x32 volume, where the entire 3D calculation fits into our memory, results in a 0.47 second 3D calculation in constrast to the 44 second 2D implementation for the same volume size. 3.2.2. Part 2: Signal & image generation Part two of the simulator was compared with the output of the Montreal simulator and with experimental data. Figure 9 shows a comparison of T1-weighted transverse slices from (a) the Montreal simulator and from (b) Part 2 of our simulator. Both images were generated with (a) (b) (c) (d) Figure 8. The perturbation in the field along different scan lines of the sinus phantom. The analytic and SVC solutions are represented by solid and dashed lines, respectively. (a) Perturbed field along the black horizontal line in Figure 7(b). The max absolute error is 0.7 ppm. (b) Perturbed field along the white horizontal line in Figure 7(b). The max absolute error is 0.32 ppm. (c) Perturbed field along the black vertical line in Figure 7(b). The max absolute error is 0.55 ppm. (d) Perturbed error along the white vertical line in Figure 7(b). The max absolute error is 0.20 ppm. zero noise and necessarily exclusive of the inhomogeneity feature, since the Montreal simulation does not support it. The primary difference, shown in (c), arises from a blurring in (a) that is not present in (b). This blurring is the result of the Montreal simulation of the effects of intravoxel dephasing by means of a uniform T2* modeling of spin isochromats. There is no such simplification included in (b). The Montreal simulation assumes that the dephasing is spatially uniform for all voxels of a given tissue type, whereas in our model dephasing is sensitive to the variation in susceptibility across the object and is hence spatially varying. a b c Figure 9. Spin echo images (TR = 500 msec, TE = 25 msec) without inhomogeneities: (a) Montreal simulation; (b) Our simulation; (c) Subtraction image: (b) - (a). Note: Image (c) is displayed so as to span the range from black to white with 0 mapped to gray, but its actual range is only 15% of the range of image (b). The above comparison gives evidence that our simulator is working given no inhomogeneities, but the full power of the simulator is drawn upon only when Part 1 is combined with Part 2. The full validation was performed against experimental images of the sinus phantom described in Section 3.1.2. The perturbed field for the phantom generated using Part 1 was included in the input into Part 2. Spin-echo (SE), gradient-echo (GE), and SE echo planar images (EPI) of the central slice of the sinus phantom were generated and compared to the same set obtained on a GE Signa VH/i 3.0T scanner. The following imaging parameters were used for the imaging sequences: SE: TE/TR = 20/2000ms, GE: TE/TR = 10/800ms, and SE EPI: TE/TR = 180/800. The SE and GE images were acquired using a 256x256 imaging matrix with a readout bandwidth of 15.6kHZ, while the SE EPI used a 128x128 matrix and a readout bandwidth of 62.5kHz with a blipped back-and-forth trajectory. A field of view (FOV) of 20 cm was specified for each sequence. In addition to the perturbed field and imaging parameters, the voxel-based representation of the phantom for Part 2 requires T1, T2, and proton density values at each voxel location. T1 and T2 of the distilled water were measured at 2.6 sec and 1.9 sec, respectively. T1 was measured using an inversion recovery sequence, while T2 was measured by varying the TE of a standard SE sequence. The proton density of the distilled water was specified as 1.0. The corresponding values for the non-signal generating plastic were set to zero. The simulated images were generated with no noise. Noise can readily be added to signal readout (the k-space data) or to the resulting (Fourier transformed) images. However, for validation of the distortion patterns it was not deemed necessary to incorporate noise into the simulated images. The experimental and simulated images, generated from a 256x256 model of the central slice of the phantom are shown in Figure 10. There is excellent agreement for the SE images shown in Figure 10 (a). The GE images in Figure 10 (b) demonstrate the signal loss that occurs in the absence of a 180o RF refocusing pulse. The signal loss can be more readily seen in the “corners” of the arrowheads. The signal loss is similarly seen in the simulated GE image, but there are a few differences worth noting. First, the arrowhead pattern is not as continuous as in the experimental image. Furthermore, there is a ringing artifact visible around the edges of the cylinder. To investigate the cause of this artifact the simulation of the GE images were repeated with two (512x512) and three (768x768) times the object resolution of the original model. The increase in resolution not only affords a more continuous description of the object, e.g., in the airfilled cylinder regions, but also increases the number of object voxels to image voxels to four and nine, respectively. The simulated images using the higher resolutions are shown in Figure 11. The increase in resolution causes a concomitant decrease in the artifacts seen around the air-filled cylinders. The improvements as the resolution increases indicate that the leading cause of the artifacts seen in the simulated image in Figure 10 (b) is the lower resolution definition. The highresolution object-definition not only provides for a more continuous definition, but also provides more spins per imaging voxel reducing the ringing artifact. The similarity of the severely distorted SE EPI images in Figure 10 (c) further validate the effectiveness of the simulator. The major differences between the experimental and simulated images lie in the intensity along the distorted top edge of the phantom (noted by the two white arrows near the top) that is absent in the experimental image. This may be a consequence of our linear approximation of the inhomogeneity across a voxel and the fact that we do not currently model time varying effects like eddy currents. In contrast, the experimental image contains higher order and time varying field variations that may contribute to dephasing effects contributing to those differences in this extreme case. (a) (b) (c) (d) Figure 10. Comparison of experimental (top row) and simulated (bottom row) images of sinus phantom. The frequency encoding direction is from left to right and the FOV=20 cm for all images. The arrows highlight various features that are discussed in Section 3.2. (a) SE. Imaging parameters: TE=20ms, TR=2000ms, 256x256 imaging matrix. (b) GE. Imaging parameters: TE=10ms, TR=800ms, 256x256 imaging matrix. (c) SE EPI. Imaging parameters: TE=180ms, TR=800ms, 128x128 imaging matrix. (d) Same as (c) but with the window/level changed to reveal ghost artifacts. (a) (b) Figure 11. Simulated GE images at (a) two (512x512) and (b) three (768x768) times the object model resolution of Figure 10 (c). (a) (b) (c) Figure 12. SE EPI images of sinus phantom. Image parameters: TE=180ms, TR=800ms, 128x128 imaging matrix (same parameters as those of Figure 10c). (a) Experimental (same as upper image of Figure 10c). (b) Simulated image calculated with Part 2 of the simulator using the experimentally measured field map. (c) Simulated image calculated with Part 2 of the simulator using the field map calculated by Part 1 of the simulator (same lower image of Figure 10c). The white arrows in each image highlight the variations in the bend along the lower edge of the phantom. The two gray open arrows in the lower half on the simulated image point out the N/2 ghost artifact that is more evident in the simulated image. The ghost artifact is a consequence of the back-and-forth k-space trajectory used in the blipped SE EPI sequence. Given the differences highlighted by the white arrows, it is no surprise that the ghost ridges (gray arrows) are more visible in the simulated image than in the experimental image. A change in the window/level in Figure 10 (d) reveals that the ghost artifact (black arrow) is also present in the experimental image. The last notable difference in the SE EPI images is a bend along the distorted bottom edge of the experimental image. To eliminate any differences that are a result of the discrepancies between the actual and calculated field map, the SE EPI image was simulated using the experimental field map as input into Part 2 of the simulator, with the result shown in Figure 12 (b). The results are very similar with a more similar distortion pattern seen along the bottom edge (indicated by the white arrows) than in Figure 10 (c). The similarity of the results lends confidence in Part 2 of the simulator and implies that some, but not all, of the differences between the experimental and simulated images are a consequence of discrepancies between the actual and simulated field map. The remaining differences are most likely a consequence of the linear model, used in Part 2 of the simulator, and factors such as a linear shim and eddy currents, which are not modeled in the simulation. Other factors potentially contributing to the differences are the assumption of instantaneous RF pulses and rectangular gradient waveforms rather than the trapezoidal and triangular pulses employed by the scanner. To model such shapes in the simulator a set of constant pulses could be used. To consider the effect of differences in the measured and calculated field map on the generation of an image, we have juxtaposed Figure 12 (b) with a copy of the lower image in Figure 10 (c). The only difference in the generation of the two images is the field map. The similarity of these two images suggests that the discrepancies in the simulation of the field map are inconsequential in the overall image simulation. 3.2.2.1. Computational time For the computation of Part 2, the 256x256 SE and GE images, Figure 10 (a) and (b), each require approximately 26 minutes to generate on the system described in Section 2.1.3. Changing the resolution of the object definition, but not the image resolution, to 512x512 voxels (4 object voxels per imaging voxel) increases the simulation time to 1 hour 45 minutes. The 128x128 SE EPI image is generated in 30 minutes with a 512x512 object definition. While using one object per imaging voxel, the 256x256 slice of the Montreal phantom, Figure 9 (b), represented by its multiple tissue volumes takes approximately 2.25 hours to generate. 3.3. Discussion The comparison with the simulated and experimental images gives evidence as to the validity of this new simulator. Further discussion of both parts of the simulator is presented below. 3.3.1. Part 1: Static field perturbation The comparison with the anayltic expression for the sphere gives evidence of the accuracy of the SVC in calculating the perturbation of the field. The limitation of this method is found near curved interfaces that are approximated in a discrete manner. This effect is not limited to this particular method, but has been noted in other methods [116, 118, 122], and can be reduced through an increase in resolution. The comparison with experiment further validates this new method. In particular, the excellent agreement with the experimental map of the Erlenmeyer flask and SVC show that, given an accurate model where each tissue’s susceptibility is known, the numerical method is quite capable of calculating the perturbed field. A few deviations from the experimental method are present with the sinus phantom, but the overall agreement is quite good. Furthermore, the agreement of the field calcuated for the Montreal phantom with the general form of the field of the head seen elsewhere [116, 118, 120, 129, 131] indicates that this method is capable of predicting the field for human anatomy. Although we have used the Montreal phantom, other models, such as the National Library of Medicine’s Visible Human Project® data could be used. In constrast to methods in which triangulation is used to model the object, [122-124] this method provides the advantage that a voxel-based model may be used to represent the object allowing for easy construction and modifications to the object. The disadvantage is the discrete representation of continuous surfaces, but the effects are limited to the proximity of the interfaces and can be reduced through an increase in spatial resolution. 3.3.2. Part 2: Signal & image generation The similarity between the experimental and simulated images in Figures 10 and 11 show the worth of the simulator in producing object-specific distortion patterns for various MRI pulse sequences. Images (a) and (b) in Figure 10 display distortions of a magnitude at the limit of that which would be tolerated clinically. The acquisition protocol for (c) & (d) produce distortions that are far beyond clinical acceptability. They are included to tax our simulation severely. The striking similarities in this extreme case suggest that simulation is a viable means for testing new sequences and analyzing their effects. Although we model intravoxel dephasing by Eq. (24), this equation only affects the strength of the signal from an object voxel. The high-frequency artifact is consequence of the limited number of spins per voxel and not the magnitude of the signal from a voxel. Therefore, even with intravoxel dephasing modeled, a limited number of object voxels per image voxel may result in a high-frequency artifact, as seen in Figure 10 (c). We have found that this is more evident in GE images and suggest that the object definition should include more than one object voxel per imaging voxel if the artifacts are severe. We suggest at least doubling the object resolution to limit the artifacts encountered in the simulation of GE images. However, doing so increases the computational time proportionally to the number of spins per imaging voxel. This simulator, like other Bloch-based simulators, is computationally expensive. The computation time may be considered a limitation to the simulator, but given the similarity between experimental and simulated images, we believe that the insight provided by the realistic simulated images outweighs the current computational requirements. Furthermore, the solution to the Bloch equation can be carried out independently for each voxel while dividing the work among several processors. Thus, the simulator fits nicely into a parallel approach if further performance enhancements are desired. 3.4. Conclusion The model from which a simulator is derived affects the domain in which the simulator proves useful. By deriving a MRI simulator based on the Bloch equation that includes the effects of static-field inhomogeneity on intravoxel dephasing, we have constructed a simulator that accurately represents the effects seen in a continuous object represented in a discrete manner. Furthermore, the inclusion of object-specific inhomogeneities produces images with realistic artifacts. As a result, the simulator has provided valuable insight into the analysis and modification of the FR method presented in Chapters IV and V.