Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Plateau principle wikipedia , lookup
Mathematical optimization wikipedia , lookup
Mathematical descriptions of the electromagnetic field wikipedia , lookup
Computational phylogenetics wikipedia , lookup
Multi-objective optimization wikipedia , lookup
Reinforcement learning wikipedia , lookup
Multiple-criteria decision analysis wikipedia , lookup
Numerical continuation wikipedia , lookup
Horner's method wikipedia , lookup
Least squares wikipedia , lookup
Strähle construction wikipedia , lookup
Data assimilation wikipedia , lookup
Newton's method wikipedia , lookup
Computational chemistry wikipedia , lookup
Root-finding algorithm wikipedia , lookup
False position method wikipedia , lookup
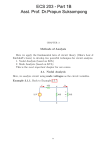
1 Technical Article Recent Developments in Discontinuous Galerkin Methods for the Time– Harmonic Maxwell’s Equations P. Houston1 , I. Perugia2 and D. Schötzau3 ICS Newsletter, Vol. 11 (2004), pp. 11-17 Abstract— In this article, we review recent work on discontinuous Galerkin (DG, for short) methods for the discretization of the time-harmonic Maxwell’s equations, based on the interior penalty discretization of the curl-curl operator. Direct and mixed methods will be presented for both the low- and high-frequency cases. The performance of the proposed DG methods will be highlighted in a series of numerical examples with known analytical solutions. I. Introduction In this article, we review recent developments in discontinuous Galerkin (DG, for short) methods with interior penalty for the discretization of the time-harmonic Maxwell’s equations: find the complex-valued electric field u such that ∇ × (µ−1 ∇ × u) − ω 2 (ε − iω −1 σ)u = j n×u=0 in Ω, (1) on Γ, (2) where Γ = ∂Ω. Here, Ω is a simply-connected Lipschitz polyhedron in R3 with connected boundary Γ = ∂Ω and unit outward normal vector n. The function j is a given (complex-valued) source term in L2 (Ω)3 . The temporal frequency is denoted by ω > 0. The real-valued functions µ, ε and σ are the magnetic permeability, electric permittivity, and electric conductivity, respectively. The origins of DG methods can be traced back to the seventies, where they were proposed for the numerical solution of the neutron transport equation, as well as for the weak enforcement of continuity in Galerkin methods for elliptic and parabolic problems; see [1] for a historical review. In the meantime, these methods have undergone quite a remarkable development and are used in a wide range of applications; see the recent survey articles [2], [3], [4], and the references cited therein. The main advantages of DG methods, and in particular the application of DG methods for the numerical approximation of the above problem are the following: • DG methods are locally conservative. That is, since the underlying partial differential equations are enforced elementwise, local conservation properties can be easily preserved on the discrete level, very much in the spirit of finite volume methods. This is particularly advantageous in time-domain computations (which are not considered in this paper); see, e.g., [5], [6] and the references therein. • The numerical robustness of DG methods means that they can easily treat a wide range of problems within the same unified framework. 1 Department of Mathematics, University of Leicester, Leicester LE1 7RH, UK. Email: [email protected] (Funded by the EPSRC: Grant GR/R76615) 2 Dipartimento di Matematica, Università di Pavia, Via Ferrata For mixed formulations, a wider choice of stable finite element spaces are available when DG methods are employed in comparison to their conforming counterparts. Indeed, in Section II-C.2, we shall see that both equal–order and mixed–order polynomial spaces may be employed for the numerical approximation of the lowfrequency approximation to (1). • Being based on discontinuous finite element spaces, DG methods can easily handle meshes with hanging nodes and local spaces of different orders. This renders DG methods well-suited for adaptive mesh refinement, as well as adaptive polynomial variation (hp–refinement). • The implementation of discontinuous elements can be based on standard shape functions; a convenience that is particularly advantageous for high-order elements and that is not straightforwardly shared by standard edge elements commonly used in computational electromagnetics (see [7], [8], [9] and the references cited therein for hp-adaptive edge element methods). Finally, we remark that while the total number of degrees of freedom of a DG method is typically larger than that of the corresponding conforming method on the same mesh, this increase is not too dramatic for higher-order elements since most of the degrees of freedom are in the interior of the elements. In this article, we focus on interior penalty DG discretizations for (1)–(2) in both the low- and highfrequency cases. We point out that many other DG approaches could be used instead of the interior penalty method presented here, with no major changes in the theoretical analysis; see, e.g., the discussion in [10]. In the low-frequency case, the term ω 2 ε is neglected in (1). Problem (1)–(2) then has to be completed by a divergence-free constraint in the subdomain Ω0 ⊆ Ω covered by insulating materials where σ = 0 (additional scalar constraints arise if ∂Ω0 is not connected, see, e.g., [11]). This results in the following system: • ∇ × (µ−1 ∇ × u) + iωσ u = j in Ω, ∇ · (εu) = 0 in Ω0 , n × u = 0 on Γ. (3) The main difficulty here is the incorporation of the divergence-free constraint in the DG framework. We will consider two approaches: in the first one, the constraint is accounted for by introducing a regularization term as in [12] (see [11]); in the second one, a mixed approach as in [13] and [7] is adopted, and the constraint is imposed by introducing a suitable Lagrange multiplier (see [14] and [15]). As will be shown in our numerical tests, the regularized DG approach suffers from the same drawback as its conforming counterpart, namely, if the solution ex- 2 lized and non-stabilized formulations that were designed and analyzed in [14] and [15], respectively. We discuss the corresponding energy norm a priori error estimates, as well as the energy norm a posteriori estimates obtained in [16] for the non-stabilized formulation in [15]. For further numerical tests, we also refer the reader to [17]. In the high-frequency case, renaming (ε − iω −1σ) by ε, problem (1)–(2) becomes ∇×(µ−1 ∇×u)−ω 2 εu = j in Ω, n×u = 0 on Γ. (4) Here, we assume that ω 2 is not an eigenvalue of the underlying Maxwell eigenproblem. While the design of interior penalty DG methods is straightforward, the key difficulty for (4) arises in the numerical analysis of the methods due to the indefiniteness caused by the zeroth order term. The first DG method for problem (4), based on a mixed formulation, was introduced and studied in [18]. The method there contains volume stabilization terms which have been numerically observed to be unnecessary. Here, we present the main results of a novel error analysis that was recently developed in [19] and [20], for a direct and a mixed formulation, respectively, which do not contain the volume stabilization terms of the method in [18]. These results show that DG methods for (4) yield optimal rates of convergence in the energy norm and the L2 (Ω)-norm. To simplify the presentation in this article, we assume that µ and ε are constants. However, the analysis in [14], [15] covers the case of piecewise smooth material coefficients, and the theoretical results in [19], [20] can be readily extended to smooth coefficients. element spaces: Vh := {v ∈ L2 (Ω)3 : v|K ∈ P ` (K)3 ∀K ∈ Th }, Qh := {q ∈ L2 (Ω) : q|K ∈ P m (K) ∀K ∈ Th }, where P k (K) denotes the space of (complex) polynomials of total degree at most k on K. For s ≥ 0 and D a bounded domain in R2 or R3 , we denote by k · ks,D the standard norm in the Sobolev space H s (D)d , d ≥ 1. For s = 0, we write L2 (D) in lieu of H 0 (D), and denote by (·, ·)D Rthe standard L2 (Ω)-inner product defined by (v, w)D = D v w dx. We further define the broken Sobolev space H s (Th ) = {v ∈ L2 (Ω) : v|K ∈ H s (K), ∀K ∈ Th }, endowed with the broken Sobolev norm denoted by k · ks,Th . For the computational domain Ω ⊂ R3 , H(curl; Ω) is the space of functions in L2 (Ω)3 with curl in L2 (Ω)3 , and H(div; Ω) the space of functions in L2 (Ω)3 with divergence in L2 (Ω). We denote by H0 (curl; Ω) and H0 (div; Ω) the subspaces of H(curl; Ω) and H(div; Ω), respectively, with zero tangential and normal boundary trace, respectively. Finally, we set V(h) = H0 (curl; Ω) + Vh and Q(h) = H01 (Ω) + Qh and define the following DG norms with which we will measure the approximation errors: 1 1 kvk2V(h) = kε 2 vk20,Ω + kµ− 2 ∇h × vk20,Ω 1 1 + kµ− 2 h− 2 [[v]]T k20,Fh , 1 II. Discontinuous Galerkin Discretizations In this section, we introduce interior penalty DG methods for the two model problems in (3) and (4), and review their theoretical properties. A. Preliminaries We consider conforming, shape-regular affine meshes Th that partition the domain Ω into tetrahedra {K}; the parameter h denotes the mesh size of Th given by h = maxK∈Th hK , where hK is the diameter of the element K ∈ Th . We denote by FhI the set of all interior faces of elements in Th , by FhB the set of all boundary faces, and set Fh := FhI ∪ FhB . We define the local meshsize h on Fh by setting h(x) := max{hK + , hK − }, if x is in the interior of ∂K + ∩ ∂K − , and by h(x) := hK if x ∈ ∂K is on the boundary Γ. For piecewise smooth vector-valued and scalar-valued functions v and q, respectively, we introduce the following trace operators. On an interior face f ∈ FhI shared by two neighboring elements K + and K − with unit outward normal vectors n± , respectively, denoting by v± and q ± the traces of v and q taken from within K ± , respectively, we define the jumps and averages across f by [[v]]T := n+ × v+ + n− × v− , [[v]]N = v+ · n+ + v− · n− , [[q]]N = q + n+ + q − n− , {{v}} := (v+ + v− )/2 and {{q}} := (q + + q − )/2, respectively. On a boundary face f ∈ FhB , we set [[v]] := n × v, {{v}} := v and [[q]] = qn. (5) 1 1 kqk2Q(h) = kε 2 ∇h qk20,Ω + kε 2 h− 2 [[q]]N k20,Fh , where we have used ∇h to denote the elementwise application of the operator ∇ and have set kϕk20,Fh = P 2 f ∈Fh kϕk0,f . B. DG Discretization of the Curl-Curl Operator The common ingredient to all the methods presented below is the DG discretization of the curl-curl operator based on an interior penalty approach, for which the discrete (complex-valued) sesquilinear form associated to the term ∇ × (µ−1 ∇ × u) is defined by ah (u, v) = (µ−1 ∇h × u, ∇h × v)Ω Z [[u]]T · {{µ−1 ∇h × v}} + [[v]]T · {{µ−1 ∇h × u}} ds − F Z h + a µ−1 [[u]]T · [[v]]T ds. Fh Here, and in we use the convention that R R Pthe following, ∞ f ∈Fh f ϕ ds. The function a in L (Fh ) is Fh ϕ ds = the usual interior penalty stabilization function defined by a := α h−1 , (6) where α > 0 is a parameter independent of the mesh 3 C. DG Discretization of the Low-Frequency Problem (Insulating Materials) We consider the problem (3) in the case of insulating materials, i.e., Ω0 = Ω and σ = 0 in Ω, since all the key difficulties in the numerical treatment of (3) are already present in this particular case. C.1 Regularized DG Method Following [11], we consider the regularized DG method: find uh in Vh such that ah (uh , v) + rh (uh , v) = (j, v)Ω (a) (b) (c) (d) (7) for all v ∈ Vh , where ah (·, ·) is the curl-curl form defined in Section II-B, and rh (·, ·) is the form defined by rh (u, v) = (µ − Z −1 ∇h · u, ∇h · v)Ω − Z FhI [[εu]]N {{µ−1 ∇h · (εv)}} ds Z [[εv]]N {{µ−1 ∇h · (εu)}} ds + dµ−1 [[εu]]N · [[εv]]N ds. FhI FhI It represents a divergence regularization, analogous to the one introduced in [12] for continuous nodal elements. The function d in L∞ (FhI ) is defined by d := δ h−1 , (8) where δ > 0 is a parameter independent of the mesh size. Again, the form rh is positive semi-definite provided that δ > δmin for a threshold value δmin . The formulation in (7) is then well-posed and possesses a unique solution. For this method, the error is measured in terms of the following DG norm, which is naturally associated with the formulation (7): 1 1 1 kvk2DG = kµ− 2 ∇h × vk20,Ω + kµ− 2 h− 2 [[v]]T k20,Fh 1 1 1 + kµ− 2 ∇h · vk20,Ω + kµ− 2 h− 2 [[εv]]N k20,Fh . With this notation, we have the following a-priori error estimate taken from [11], [21]. Theorem 1: Assume that the analytical solution u of (3) satisfies the smoothness assumption u ∈ H s+1 (Th )3 , for s > 1/2, and let uh be the DG approximation defined by (7). Then we have the a priori error bound ku − uh kDG ≤ C hmin{s,`} kuks+1,Th . While Theorem 1 ensures optimal convergence for smooth solutions, it does not cover the case of singular solutions with regularity below H 1 (Ω)3 . Indeed, numerical results in [21] have confirmed that the regularity assumptions in Theorem 1 are sharp and cannot be weakened. Thus, as for their conforming counterparts, regularized DG approaches cannot resolve the strongest singularities. As a numerical illustration of this behavior, we consider the following example of a real–valued model problem with a singular solution and constant material coefficients µ ≡ ε ≡ 1. To this end, for simplicity, we restrict Fig. 1. Regularized DG Method: (a) & (b) First and second components of the analytical solution, respectively; (c) & (d) First and second components of the regularized DG approximation, respectively. conditions for u) so that the analytical solution u of (3) is given, in terms of the polar coordinates (r, ϑ), by u(x, y) = ∇S(r, ϑ), where S(r, ϑ) = r 2n/3 sin(2nϑ/3), (9) where n ≥ 1 is an integer parameter. Here, the boundary conditions are enforced in the usual DG manner by adding boundary terms in the formulation (7); see [21], [14] for details. The analytical solution given by (9) then contains a singularity at the re-entrant corner located at the origin of Ω; in particular, we note that u lies in the Sobolev space H 2n/3−ε (Ω)2 , ε > 0. In particular, for n = 1, u has a regularity below H 1 (Ω)2 . For n > 1, the numerical experiments presented in the article [21] confirm the optimality of the a priori error bound stated in Theorem 1. However, in the case of the strongest singularity when n = 1, the regularized DG method (7) no longer converges to the correct analytical solution given by (9). Indeed, in Fig. 1 we show the first and second components of the analytical solution and their respective regularized DG approximation; here, we set the polynomial degree ` = 1 and the stabilization parameters α = δ = 10. Furthermore, the underlying computational mesh consists of uniform quadrilaterals with 3072 elements. Here, we clearly observe that when the regularity assumptions of Theorem 1 are violated, then the regularized DG method no longer converges to the correct analytical solution; indeed, under further mesh refinement, the numerical approximation converges to the solution of a ‘nearby’ problem; cf. [22]. We remark that analogous behavior is also observed for regularized conforming methods; cf. [12], [23]. This drawback may be overcome by employing the weighted regularization 4 C.2 Mixed DG Methods Mixed DG methods for the discretization of the problem (3) with Ω0 = Ω are based on the following mixed formulation of the problem: ∇ × (µ−1 ∇ × u) − ε∇p = j in Ω, ∇ · (εu) = 0 in Ω, n × u = 0, p=0 (10) on Γ. Here, p is the Lagrange multiplier related to the divergence-free constraint. The standard variational formulation of (10) is well-posed in H0 (curl; Ω) × H01 (Ω); see, e.g., [7], [8]. Mixed DG methods for (10) are given by: find (uh , ph ) in Vh × Qh such that ah (uh , v) + sh (uh , v) + bh (v, ph ) = (j, v)Ω , bh (uh , q) − ch (ph , q) = 0 (11) for all (v, q) ∈ Vh × Qh , where ah (·, ·) is defined in Section II-B, and sh (·, ·), bh (·, ·) and ch (·, ·) are defined, respectively, by Z b [[u]]N [[v]]N ds, sh (u, v) = FhI Z {{εv}} · [[p]]N ds, = −(εv, ∇h p) + Fh Z c ε[[p]]N · [[q]]N ds. ch (p, q) = bh (v, p) Fh The form sh (·, ·) is a normal-jump stabilization form, the form bh (·, ·) discretizes the divergence operator in a DG fashion, and the form ch (·, ·) is the interior penalty form that weakly enforces the continuity of ph . The functions b and c in L∞ (Fh ) are taken to be b := β h, c := γ h−1 , (12) where β ≥ 0 and γ > 0 are parameters independent of the mesh size. In particular, we consider the following two methods: • Method I (stabilized): we take β > 0, and m = ` in (5) (equal-order polynomial spaces). • Method II (non-stabilized): we take β = 0, and m = ` + 1 in (5) (mixed-order polynomial spaces). It can be shown that both methods are well-posed and possess unique solutions provided that α > αmin . The error estimates contained in the following theorem have been proved and numerically validated in [14] for Method I, and in [15] for Method II. Theorem 2: Assume that the analytical solution (u, p) of (10) satisfies the smoothness assumptions u ∈ H s (Th )3 , ∇ × u ∈ H s (Th )3 and p ∈ H s+1 (Th ), for s > 1/2, and let (uh , ph ) be the DG approximation obtained by (11) with Method I or Method II. Then we have the optimal a priori error bound ku − uh kV(h) + kp − ph kQ(h) ≤ C hmin{s,`} kεuks,Th + kµ−1 ∇ × uks,Th + kpks+1,Th . Unlike Theorem 1, the result in Theorem 2 is valid for Section III below. There, we also compare the practical performance of Method I and Method II. Although the result in Theorem 2 ensures convergence for highly singular solutions, the overall accuracy of the numerical simulations can be highly improved using local mesh refinement. Such refinement strategies are typically based on suitable a posteriori error estimates. Here, we present a simple energy norm a posteriori error estimate for Method II. It has been established and tested in [16]. Theorem 3: Assume that ∇ · j = 0. Let (uh , ph ) be the DG approximation obtained by (11) with Method II. Then there is a parameter σ ∈ (1/2, 1] only depending on Ω and a constant C > 0 independent of the mesh size, such that X 1/2 2 ku − uh kV(h) + kp − ph kQ(h) ≤ C ηK , K∈Th where the elemental error indicator ηK is given by 2 −1 = h2σ ∇ × uh ) + ε∇ph k20,K ηK K kj − ∇ × (µ 1 2σ−1 2 2 + hK kb τK (uh ) − τK (uh )k20,∂K + h−1 K kµ [[uh ]]T k0,∂K + hK k[[εuh ]]N k20,∂K\Γ + h2K k∇ · (εuh )k20,K 1 1 2 2 + kε 2 ∇ph k20,K + h−1 K kε [[ph ]]N k0,∂K , and τbK (v) is the numerical flux defined by nK × ({{µ−1 ∇ × v}} − µ−1 a [[v]]T ) on ∂K \ Γ, τbK (v) = nK × (µ−1 ∇ × v − µ−1 a (nK × v)) on ∂K ∩ Γ. The parameter σ depends on the opening angles of Ω and can be determined easily for the domain under consideration. In particular, if Ω is convex, we can choose σ = 1; cf. [16]. D. DG Discretization of the High-Frequency Problem Next, we introduce two methods for the DG approximation of the indefinite problem (4). D.1 Direct DG Method For problem (4), a direct interior penalty DG method is given by: find uh ∈ Vh such that ah (uh , v) − ω 2 (εuh , v)Ω = (j, v)Ω (13) for all v ∈ Vh , where the discrete form ah (·, ·) is the curl-curl discretization from Section II-B. The interior penalty stabilization function a ∈ L∞ (Fh ) is defined again by (6), with α chosen independently of the mesh size and the frequency. The following a priori error estimates in the energy norm and the L2 (Ω)-norm have been proved in [19]. Their proofs are based on techniques similar to those of [24] and [25, Section 7.2], for the energy error bound, and of [26, Theorem 3.2], for the L2 (Ω)-error bound, combined with novel results that allow for the approximation of a discontinuous function by a conforming one. This result is instrumental in controlling the non-conformity of the DG method. Theorem 4: Assume that the analytical solution u of (4) satisfies the regularity assumptions u ∈ H s (Th )3 and ∇×u ∈ H s (Th )3 , for s > 12 , and let uh be the DG approximation defined by (13). Then, for sufficiently small 5 1 kε 2 (u − uh )k0,Ω ≤ C h`+1 kuk`+1,Th . The analysis of [19] is based on duality arguments; thus, the result of Theorem 4 can easily be extended to smooth material coefficients µ and ε. However, the extension to piecewise smooth coefficients cannot be based on duality and is the subject of ongoing research. D.2 Mixed DG Method A mixed DG method, which can be used for the full Maxwell problem (1) with σ = 0 and real-valued j, irrespective of whether the problem is in the low- or high-frequency regime, is obtained by performing the Helmholtz decomposition of the unknown field u as w + ∇ϕ, with ϕ ∈ H01 (Ω) and w ∈ H0 (curl; Ω) with zero divergence. By setting p := ω 2 ϕ and renaming w by u, the problem can be naturally written in the following mixed form: ∇ × (µ−1 ∇ × u) − ω 2 εu − ε∇p = j in Ω, ∇ · (εu) = 0 in Ω, n × u = 0, p=0 (14) on Γ. The mixed DG method for the numerical approximation of (14) studied in [20] is defined as follows: find (uh , ph ) in Vh × Qh , with m = ` + 1, such that ah (uh , v) − ω 2 (εuh , v)Ω + bh (v, ph ) = (j, v)Ω , bh (uh , q) − ch (ph , q) = 0 (15) for all (v, q) ∈ Vh × Qh , where ah (·, ·) is defined in Section II-B, and bh (·, ·) and ch (·, ·) are defined as in Section II-C.2. Optimal a priori energy-norm and L2 (Ω)-norm error estimates for the method in (15) can be readily obtained by by combining the techniques of [19] for the analysis of the method in (13) with the ones of [15] for the mixed Method II of Section II-C.2; cf. [20]. III. Numerical Results In this section we present a series of numerical experiments for model problems in two dimensions with known analytical solutions in order to both confirm the optimality of our a priori error bounds, as well as to highlight the practical performance of the DG methods reviewed in this article. Throughout this section we select the interior penalty parameter α in (6) as follows: α = 10 `2 . A. Example 1 sin(π(x − 1)/2) sin(π(y − 1)/2). Here, we investigate the asymptotic convergence of both methods on a sequence of successively finer uniform square and quasi-uniform unstructured triangular meshes for ` = 1, 2, 3. For both methods we set γ = 1; for Method I (stabilized method), we set β = 1, while β = 0 for Method II (non-stabilized method), cf. (12). In Fig. 2 we first present a comparison of the sum of the DG–norms ku − uh kV(h) and kp − ph kQ(h) with respect to the square root of the number of degrees of freedom in the finite element space Vh × Qh for the first (stabilized) method; for brevity, we have not shown these quantities individually, since for this equal-order method, each of these norms of the error converges to zero at the same rate. Indeed, here we observe convergence, for each fixed `, at the optimal rate O(h` ) as the mesh is refined, thereby confirming Theorem 2. We remark that here we are only interested in demonstrating the general performance of the underlying method on meshes comprising of either square or triangular elements, but not in making a formal comparison of the accuracy of the scheme with respect to each element type. Indeed, although for each fixed ` we observe that the error on the uniform square meshes is smaller than the corresponding quantity measured on triangular meshes, the former meshes consist of uniform structured meshes, where we anticipate that local error cancellation will lead to a reduction in the size of the global error. On the other hand, the triangular meshes are completely unstructured, so we do not expect the same level of local error cancellation. In Figs. 3 & 4 we plot the DG–norms k · kV(h) and k · kQ(h) of the errors u − uh and p − ph , respectively, as the mesh size tends to zero for Method II. As for Method I, we again observe that ku − uh kV(h) converges to zero, for each fixed `, at the optimal rate O(h` ), as the mesh is refined, in accordance with Theorem 2. On the other hand, for this mixed-order method, kp − ph kQ(h) converges to zero at the rate O(h`+1 ), for each `, as h tends to zero; this rate is indeed optimal, though this is not reflected by Theorem 2. Finally, we highlight the optimality of Method II when the error in the computed vector field uh is measure in terms of the L2 (Ω)-norm. As noted in [14], ku − uh k0,Ω converges at the suboptimal rate O(h` ), for each `, as h tends to zero when Method I is employed, cf. Fig. 5. ku − uh kV(h) + kp − ph kQ(h) Moreover, assume that the analytical solution u of (4) satisfies u ∈ H `+1 (Th )3 and the domain Ω is convex. Then, for sufficiently small mesh sizes, we have the optimal L2 -error bound In this first example we consider the numerical perPSfrag replacements formance of the stabilized and non-stabilized mixed DG methods for the numerical approximation of the lowfrequency problem (10) in the case when µ ≡ ε ≡ 1 and the underlying analytical solution is smooth. To this end, we set Ω = (−1, 1)2 and select j and suitable non-homogeneous boundary conditions for u, i.e., 0 10 `=1 1 1 `=2 −1 10 1 `=3 −2 10 2 −3 10 1 −4 10 3 Square Elements Triangular Elements 1 10 √ 2 10 Degrees of Freedom 6 0 10 −1 `=1 10 `=1 1 ku − uh kV(h) ku − uh k0,Ω `=2 −2 10 1 −3 10 2 `=3 1 −4 g replacements PSfrag replacements 3 1 −6 √ −5 10 1 3 10 Square Elements Triangular Elements 10 2 −4 −6 10 1 1 `=3 10 10 Square Elements Triangular Elements −7 10 2 1 10 √ 10 Degrees of Freedom Fig. 3. Example 1. Method II: Convergence of ku − uh kV (h) . 2 10 Degrees of Freedom Fig. 5. Example 1. Method I: Convergence of ku − uh k0,Ω . 0 −1 10 10 `=1 `=1 −1 1 −2 10 10 1 `=2 2 −2 10 `=2 2 −3 10 `=3 −3 10 ku − uh k0,Ω kp − ph kQ(h) 1 `=2 −2 10 1 1 −4 10 g replacements 1 −5 10 PSfrag replacements 1 `=3 −4 10 3 3 −5 10 1 −6 10 4 4 −7 −6 10 10 Square Elements Triangular Elements −7 10 1 10 √ Square Elements Triangular Elements −8 10 2 10 Degrees of Freedom 1 10 √ 2 10 Degrees of Freedom Fig. 4. Example 1. Method II: Convergence of kp − ph kQ(h) . Fig. 6. Example 1. Method II: Convergence of ku − uh k0,Ω . On the other hand, Fig. 6 demonstrates that the mixedorder method (Method II) yields an optimal convergence rate for the above quantity as the mesh is refined. mixed form (14). Here, we take µ = µ0 and ε = ε0 , the permeability and permittivity of the free space, respectively, and, as is standard in electromagnetic computations, we re-scale each problem by µ0 in order to √ introduce the wave number k = ω µ0 ε0 . Thereby, the mixed problem (14) becomes B. Example 2 In this section we now consider the application of the stabilized and non-stabilized mixed DG methods to the numerical approximation of the low-frequency model problem considered in Section II-C.1, cf. (9). We recall that in the case of the strongest singularity when n = 1, the regularized method (7) fails to converge to the correct analytical solution defined in (9). In contrast, both the stabilized and non-stabilized mixed methods proposed in Section II-C.2 converge to the analytical solution (9) at the optimal rate predicted in Theorem 2, cf. Tables I and II, respectively. Here, r denotes the computed convergence rate; additionally, we have employed the notation |||e|||DG to denote the sum of the DG–norms ku−uh kV(h) and kp−ph kQ(h) . For the stabilized method, Table I demonstrates the optimal convergence of the DG scheme on a sequence of uniform square meshes consisting of 12 elements on the coarsest mesh and 3072 on the finest; Table II shows analogous results for the nonstabilized method on uniform triangular meshes consisting of 24 elements on coarsest mesh and 6144 on the finest. C. Example 3 ∇ × ∇ × u − k 2 u − ∇p = j in Ω, ∇·u=0 in Ω, n × u = 0, p=0 (16) on Γ, with a rescaled Lagrange multiplier and right-hand side (again denoted by p := k 2 ϕ and j, respectively). We select Ω ⊂ R2 to be the square domain (−1, 1)2 . Furthermore, we set j = 0 and select suitable nonhomogeneous boundary conditions for u, so that the analytical solution to the two-dimensional analogue of (16) is T given by the smooth field u(x, y) = (sin(ky), sin(kx)) , p = 0. We investigate the asymptotic convergence of the mixed DG method (15) on a sequence of successively finer (quasi-uniform) unstructured triangular meshes for ` = 1, 2, 3 as the wave number k increases. To this end, in Fig. 7 we first present a comparison of the DG–norm ku − uhkV(h) with respect to the square root of the number of degrees of freedom in the finite element space Vh for k = 1, 2. Here, we observe that (asymptotically) ku−uh kV(h) converges to zero at the optimal rate O(h` ), 7 |||e|||DG 1.473 1.245 0.905 0.607 0.393 `=2 r 0.24 0.46 0.58 0.63 |||e|||DG 1.876 1.381 0.930 0.602 0.384 r 0.44 0.57 0.63 0.65 `=3 |||e|||DG 2.083 1.485 0.988 0.637 0.405 0 10 r 0.49 0.59 0.63 0.65 −2 10 ku − uh k0,Ω `=1 `=1 −4 10 PSfrag replacements TABLE I Example 2. Method I: Convergence of |||e|||DG on uniform square meshes with h–refinement. `=2 −6 10 `=3 −8 10 k=1 k=2 1 10 `=1 |||e|||DG 2.677 2.439 1.799 1.196 0.765 `=2 r 0.13 0.44 0.59 0.65 |||e|||DG 3.704 2.907 2.002 1.300 0.826 r 0.35 0.54 0.62 0.65 `=3 |||e|||DG 4.348 3.254 2.196 1.417 0.8989 r 0.42 0.57 0.63 0.66 TABLE II Example 2. Method II: Convergence of |||e|||DG on uniform triangular meshes with h–refinement. √ 2 10 Degrees of Freedom Fig. 8. Example 3. Convergence of ku − uh k0,Ω . agreement with the optimal rate predicted in [19]. Numerical experiments also indicate that the L2 (Ω)-norm of the error in the approximation to p converges to zero at the optimal rate O(h`+2 ), for each fixed ` and each k, as h tends to zero; for brevity, these results have been omitted. IV. Conclusions `+1 O(h ), for each ` and k, as h tends to zero; for brevity, these results have been omitted. We now make two key observations: firstly, we note that for a given fixed mesh and fixed polynomial degree, an increase in the wave number k leads to an increase in the DG-norm of the error in the approximation to u. Indeed, as pointed out in [19] and [9], where interior penalty and curl-conforming finite element methods, respectively, were employed for the numerical approximation of (16), the pre-asymptotic region increases as k increases. Secondly, we observe that the DG-norm of the error decreases when either the mesh is refined, or the polynomial degree is increased as we would expect for this smooth problem. Finally, in Fig. 8 we present a comparison of the L2 (Ω)norm of the error in the approximation to u, with the square root of the number of degrees of freedom in the finite element space Vh . Here, we observe that (asymptotically) ku−uh k0 converges to zero at the rate O(h`+1 ), for each fixed ` and each k, as h tends to zero. This is in full 0 10 −1 ku − uh kV(h) 10 g replacements `=1 −2 10 −3 In this article, we have reviewed interior penalty DG methods for the numerical approximation of the timeharmonic Maxwell’s equations in both the low- and highfrequency regimes. For the low-frequency problem, both regularized and mixed DG formulations have been proposed; the latter are advantageous in the sense that convergence of the underlying schemes is guaranteed even in the case when only minimal regularity assumptions on the analytical solution hold. In the mixed setting, two schemes, a stabilized and a non-stabilized variant, have been proposed. While both schemes deliver optimal rates of convergence when the error is measured in terms of a discrete energy norm, only the non-stabilized scheme ensures optimality of the error in the electric field in the L2 (Ω)–norm. For this latter scheme, optimal a posteriori error bounds have also been deduced. Finally, for the high-frequency problem, both direct and mixed methods have been proposed. The key advantage of the mixed approach is that it allows for a unified approximation of the time-harmonic Maxwell system in both the low- and high-frequency regimes; indeed, in the low-frequency case, this method corresponds to the nonstabilized mixed method studied in [15]. Our current and future research is devoted to the extension of the analysis of the high-frequency problem to piecewise smooth coefficients, as well as the application of these methods to practical problems of industrial interest. References `=2 10 [1] −4 10 −5 10 `=3 k=1 k=2 −6 10 1 10 [2] √ 2 10 Degrees of Freedom B. Cockburn, G.E. Karniadakis, and C.-W. Shu, “The development of discontinuous Galerkin methods,” in Discontinuous Galerkin Methods: Theory, Computation and Applications, B. Cockburn, G.E. Karniadakis, and C.-W. Shu, Eds. 2000, vol. 11 of Lect. Notes Comput. Sci. Engrg., pp. 3–50, Springer–Verlag. B. Cockburn, “Discontinuous Galerkin methods for convection-dominated problems,” in High-Order Methods for Computational Physics, T. Barth and H. Deconink, Eds., 8 [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] tinuous Galerkin Methods. Theory, Computation and Applications, vol. 11 of Lect. Notes Comput. Sci. Engrg., Springer– Verlag, 2000. B. Cockburn and C.-W. Shu, “Runge–Kutta discontinuous Galerkin methods for convection–dominated problems,” J. Sci. Comp., vol. 16, pp. 173–261, 2001. B. Cockburn, F. Li, and C.-W. Shu, “Locally divergence-free discontinuous Galerkin methods for the Maxwell equations,” J. Comput. Phys., vol. 194, pp. 588–610, 2004. J.S. Hesthaven and T. Warburton, “Nodal high-order methods on unstructured grids. I. Time-domain solution of Maxwell’s equations,” J. Comput. Phys., vol. 181, pp. 186–221, 2002. L. Demkowicz and L. Vardapetyan, “Modeling of electromagnetic absorption/scattering problems using hp–adaptive finite elements,” Comput. Methods Appl. Mech. Engrg., vol. 152, pp. 103–124, 1998. L. Vardapetyan and L. Demkowicz, “hp-adaptive finite elements in electromagnetics,” Comput. Methods Appl. Mech. Engrg., vol. 169, pp. 331–344, 1999. M. Ainsworth and J. Coyle, “Hierarchic hp-edge element families for Maxwell’s equations on hybrid quadrilateral/triangular meshes,” Comput. Methods Appl. Mech. Engrg., vol. 190, pp. 6709–6733, 2001. D.N. Arnold, F. Brezzi, B. Cockburn, and L.D. Marini, “Unified analysis of discontinuous Galerkin methods for elliptic problems,” SIAM J. Numer. Anal., vol. 39, pp. 1749–1779, 2001. I. Perugia and D. Schötzau, “The hp-local discontinuous Galerkin method for low-frequency time-harmonic Maxwell equations,” Math. Comp., vol. 72, pp. 1179–1214, 2003. A. Alonso and A. Valli, “A domain decomposition approach for heterogeneous time-harmonic Maxwell equations,” Comput. Methods Appl. Mech. Engrg., vol. 143, pp. 97–112, 1997. Z. Chen, Q. Du, and J. Zou, “Finite element methods with matching and nonmatching meshes for Maxwell equations with discontinuous coefficients,” SIAM J. Numer. Anal., vol. 37, pp. 1542–1570, 2000. P. Houston, I. Perugia, and D. Schötzau, “Mixed discontinuous Galerkin approximation of the Maxwell operator,” SIAM J. Numer. Anal., vol. 42, pp. 434–459, 2004. P. Houston, I. Perugia, and D. Schötzau, “Mixed discontinuous Galerkin approximation of the Maxwell operator: Nonstabilized formulation,” Tech. Rep. 2003/17, University of Leicester, Department of Mathematics, 2003, To appear in J. Sci. Comp. P. Houston, I. Perugia, and D. Schötzau, “Energy norm a posteriori error estimation for mixed discontinuous Galerkin approximations of the Maxwell operator,” To appear in Comput. Methods Appl. Mech. Engrg. P. Houston, I. Perugia, and D. Schötzau, “Nonconforming mixed finite element approximations to time-harmonic eddy current problems,” IEEE Trans. Mag., vol. 40(2), pp. 1268– 1273, 2004. I. Perugia, D. Schötzau, and P. Monk, “Stabilized interior penalty methods for the time-harmonic Maxwell equations,” Comput. Methods Appl. Mech. Engrg., vol. 191, pp. 4675– 4697, 2002. P. Houston, I. Perugia, A. Schneebeli, and D. Schötzau, “Interior penalty method for the indefinite time-harmonic Maxwell equations,” Tech. Rep. 2003-15, Pacific Institute for the Mathematical Sciences, 2003. P. Houston, I. Perugia, A. Schneebeli, and D. Schötzau, “Mixed discontinuous Galerkin approximation of the Maxwell operator: The indefinite case,” Tech. Rep., In preparation. P. Houston, I. Perugia, and D. Schötzau, “hp-DGFEM for Maxwell’s equations,” in Numerical Mathematics and Advanced Applications ENUMATH 2001, F. Brezzi, A. Buffa, S. Corsaro, and A. Murli, Eds. 2003, pp. 785–794, SpringerVerlag. A.S. Bonnet-BenDhia, C. Hazard, and S. Lohrengel, “A singular field method for the solution of Maxwell’s equations in polyhedral domains,” SIAM J. Appl. Math., vol. 59, pp. 2028– 2044, 1999. M. Costabel and M. Dauge, “Weighted regularization of Maxwell equations in polyhedral domains,” Numer. Math., vol. 93, pp. 239–277, 2002. P. Monk, “A simple proof of convergence for an edge element discretization of Maxwell’s equations,” in Computational electromagnetics, C. Carstensen, S. Funken, W. Hackbusch, R. Hoppe, and P. Monk, Eds., vol. 28 of Lect. Notes Comput. Sci. Engrg., pp. 127–141. Springer–Verlag, 2003. P. Monk, Finite element methods for Maxwell’s equations, Oxford University Press, New York, 2003.