Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Image-Guided/Adaptive Radiotherapy
321
25 Image-Guided/Adaptive Radiotherapy
Di Yan
CONTENTS
25.1
25.2
25.3
25.3.1
25.3.2
25.3.3
25.4
25.4.1
25.4.2
25.4.3
25.5
25.5.1
25.5.2
25.5.3
25.6
25.6.1
25.6.2
25.7
25.7.1
25.7.2
25.8
Introduction 321
Temporal Variation of Patient/Organ Shape and
Position 323
Imaging and Verification 324
Verification with Radiographic Imaging 324
Verification with Fluoroscopic Imaging 325
Verification with CT Imaging 325
Estimation and Evaluation 327
Parameter Estimation for a Stationary Temporal
Variation Process 327
Parameter Estimation for a Non-stationary
Temporal Variation Process 328
Estimation of Cumulative Dose 329
Design of Adaptive Planning and Adjustment 330
Design Objectives 330
Adaptive Planning and Adjustment Parameters 330
Adaptive Planning and Adjustment Parameter and
Schedule: Selection and Modification 330
Adaptive Planning and Adjustment 332
Indirect Method 332
Direct Method 333
Adaptive Treatment Protocol 334
Example 1: Image-Guided/Adaptive Radiotherapy
for Prostate Cancer 334
Example 2: Image-Guided/Adaptive Radiotherapy
for NSCLC 334
Summary 335
References 335
25.1
Introduction
Adaptive radiotherapy is a treatment technique that
can systematically improve its treatment plan in response to patient/organ temporal variations observed
during the therapy process. Temporal variations in
radiotherapy process can be either patient/organ
D. Yan, D.Sc.
Director, Clinical Physics Section, Department of Radiation
Oncology, William Beaumont Hospital, Royal Oak, MI 480736769, USA
geometry or dose-response related. Examples of the
former include inter- and intra-treatment variations
of patient/organ shape and positions caused by patient setup, beam placement, and patient organ physiological motion and deformation. Examples of dose
response characteristics include the variations of size
and location of tumor hypoxic volume, the apparent tumor growth fraction, and normal tissue damage/repair kinetics. Furthermore, tumor and normal
organ dose response also induce changes in tissue
shape and positions.
This chapter focuses on the use of adaptive
strategies to manage patient/organ shape and position related temporal variations; however, the concepts of adaptive radiotherapy can be extended to a
much broader range, including the management in
temporal variations of patient/organ biology.
It is generally accepted that temporal variations are
the predominant sources of treatment uncertainty in
conventional radiation treatment. Numerous imaging studies have demonstrated that substantial temporal variations of patient/organ shape and position
could occur during a typical radiotherapy course
(Brierley et al. 1994; Davies et al. 1994; Halverson
et al. 1991; Marks and Haus 1976; Moerland et al.
1994; Nuyttens et al. 2001; Roeske et al. 1995; Ross
et al. 1990). Consequently, the radiation dose delivered to the target and a critical normal organ adjacent to the target can significantly deviate from that
calculated in the pre-treatment planning. This deviation causes a time-dependent, or temporal, variation
in the organ-dose distribution, consisting of both
dose variation per treatment fraction and cumulative
dose variation in each subvolume of the organ, and
results in major treatment uncertainties. These uncertainties induce fundamental obstacles to assuring
treatment quality and understanding the normal tissue dose response, thereby hindering reliable treatment optimization.
Temporal variations in patient/organ shape and
position during the radiotherapy course can be separated into a systematic component and a random
component. The systematic component represents
D. Yan
322
a consistent discrepancy between the patient/organ shape and position appearing in pre-treatment
simulation/planning and that at treatment delivery;
therefore, it is also called treatment preparation error
(Van Herk et al. 2000). The random component represents patient/organ shape and position variations
between treatment deliveries; these are also referred
to as treatment execution errors. Because there is almost always some random component in a temporal variation, observations achieved by imaging the
patient repeatedly during the treatment course are
essential to characterize the variations. The most important function of repeat imaging is to identify the
systematic component of a temporal variation, and
consequently eliminate its effect in the treatment.
Due to intrinsic temporal variations, targeting in
radiotherapy process is, in principle, a four-dimensional (4D) problem, i.e., involving not only space but
also time; therefore, it is an adaptive optimal control
methodology ideally suited to manage this process.
A general adaptive radiotherapy system consists of
five basic components: (a) treatment delivery to deliver radiation dose to the patient based on a treatment plan; (b) imaging/verification to observe and
verify patient/organ temporal variation before, during, and/or after a treatment delivery; (c) estimation/
evaluation to estimate, based on image feedback, the
parameters which can characterize the undergoing
temporal variation process, and evaluate the corresponding treatment parameters, such as the cumulative dose, biological effective dose, TCP, NTCP, etc.;
(d) design of adaptive planning/adjustment to design
and update planning/adjustment parameters, as well
as modify imaging, delivery, and adjustment sched-
Process Parameters
(Temporal Variation Related)
Design of Adaptive
Planning / Adjustment
ules, in response to the estimation and the evaluation;
and (e) adaptive planning/adjustment to perform a
4D conformal or IMRT planning with using the planning parameters specified in the adaptive planning/
adjustment design, and adjust treatment delivery accordingly. A typical adaptive radiotherapy system is
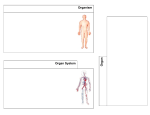
illustrated in Fig. 25.1. In the standard textbook of
adaptive control (Astrom and Wittenmark 1995),
this system is called the self-tuning regulator (STR),
indicating a system that can update its planning and
control parameters automatically. Patient treatment
in this system is initiated by a pre-treatment plan and
resides within two feedback loops. The inner loop
consists of treatment delivery, imaging/verification,
and planning/adjustment, which have been designed
primarily to perform online image-guided treatment
adjustment. The planning/adjustment parameters
are updated and modified most likely offline in the
outer loop, which is composed of the imaging/verification, parameter estimation/evaluation for a temporal variation process, design of adaptive planning/
adjustment, and adaptive planning/adjustment. In
addition, the schedules of adaptive planning/adjustment, treatment delivery, and imaging/verification
in the adaptive radiotherapy system are most likely
pre-designed and specified in a clinical adaptive
treatment protocol; however, these schedules can be
modified and updated during the treatment based on
new observation and estimation (the dashed lines in
Fig. 25.1).
The adaptive radiotherapy system shown in
Fig. 25.1 has a very rich configuration. Only a few potentials have been investigated thus far in radiotherapy which are outlined in this chapter as the exam-
Estimation/
Evaluation
(Offline feedback loop)
Planning / Adjustment
Parameters
(Online feedback loop)
Adaptive Planning /
Adjustment
Treatment Delivery
Imaging
Verification
Pretreatment Plan
Re-schedule
Adjustment Schedule
Delivery Schedule
Imaging Schedule
Clinical Adaptive Treatment Protocol
(Schedules of Imaging, Delivery, & Planning / Adjustment)
Fig. 25.1 Adaptive radiotherapy system
Image-Guided/Adaptive Radiotherapy
323
ples of clinical implementation. In this chapter, each
key component in the adaptive radiotherapy system
is described. In section 25.2, temporal variations
of patient/organ shape and position are outlined
and classified based on their characteristics. In section 25.3, X-ray imaging and verification techniques
are described. Estimation and evaluation of temporal
variation-related process parameters are introduced
in section 25.4. In section 25.5 design and selection
of control parameters for adaptive planning and adjustment are discussed. These parameters are directly
used in the 4D planning/adjustment described in section 25.6. Finally, section 25.7 provides two typical
adaptive treatment protocols that have been implemented or intends to be implemented in the clinic.
25.2
Temporal Variation of Patient/Organ Shape
and Position
Temporal variation of an organ shape and position
with respect to the radiation beams can be determined
by the position displacement of subvolumes in the organ (V ). For a given patient treatment, patient organ
(target or normal structure) can be defined as a set of
subvolumes or volume elements v, such that V={v}.
⎡ xt(1) (v) ⎤
v
⎥
⎢
The notation xt (v) = ⎢ xt( 2 ) (v) ⎥ ∈ R 3 indicates the three⎢ xt(3) (v) ⎥
⎦
⎣
dimensional (3D) position vector of a subvolume
v at a time instant t; therefore, shape and position
variation of the organ of interest during the entire
treatment period, T, is specified as
v
v
v
xt (v) = xr (v) + ut (v), ∀v ∈ V ; t ∈ T
(1)
v
where xr(v)DR3 is the subvolume position manifested
on a pre-treatment CT image for treatment planning,
and
⎡ ut(1) (v) ⎤
v
⎥
⎢
ut (v) = ⎢ut( 2 ) (v) ⎥ ∈ R 3
⎢ut(3) (v) ⎥
⎦
⎣
is the displacement vector of the subvolume at a time
instant t.
Denoting Ti , i=1, ..., n to be the time interval of
dose delivery (<5 min) in each of the number n treatment fractions, then the organ shape and position
variation represented by the subvolume displacements during the entire course of treatment delivery
can be modeled as a process of time, or a temporal
variation process, as
n
⎧v
⎫
(2)
⎨ ut (v) | t ∈ U Ti ⊂ T ⎬ , ∀v ∈ V
i =1
⎩
⎭
On the other hand, the organ shape and position variation during each dose delivery can be modeled as
v
{ ut (v) | t ∈ Ti } , ∀v ∈V ; i = 1,..., n
(3)
It is clear that the processes [Exp. (3)] are subprocesses of the whole treatment process [Exp. (2)], and
have been called intra-treatment process. Patient/organ shape and position variations have been classified into the inter-treatment variation, defined as
v
ut (v) = const , ∀t ∈ Ti , and the intra-treatment variav
tion where ut (v) changes within Ti ; however, both the
variations most likely exist simultaneously during the
treatment delivery and cannot be easily separated.
Typical example of inter-treatment variation is the
daily treatment setup error with respect to patient
bony structure. Meanwhile, the typical example of
intra-treatment variation is the patient respirationinduced organ motion.
Given an organ subvolume, the displacement
sequence, denoted as a set of random vectors in
Exps. (2) or (3), can be modeled as a random process
within the time domain T of the treatment course or
Ti of a treatment delivery. Using Eq. (1), subvolume
displacement in the random process can be decomposed (Yan and Lockman 2001) such that
v
v
v
ut (v) = µt (v) + ξ t (v) , ∀v ∈ V ; t ∈ T
(4)
v
v
where µt (v) = E [ut (v) ] is the mean of the displacev
ment or the mean of the random process, and ξ t (v)
is the random vector which has a zero mean but same
shape of probability distribution of the displacement.
The mean, by definition, is the systematic variation,
and the standard deviation,
v
2
2
v
v
v
σt (v) = E ⎡⎣ξ t (v) ⎤⎦ = E [ut (v) − µ t (v) ] ,
v
is used to characterize the random variation ξ t (v).
In addition, the mean and the standard deviation
have been proved to be the most important factors to
influence treatment dose distribution; thus, they have
been selected as the primary process parameters of
temporal variation considered in the design of an
adaptive treatment plan.
A temporal variation process can be a stationary
random process if it has a constant mean during
v
v
the treatment course, such as µt (v) =µ (v) , ∀ t ∈ T ,
and a constant standard deviation, such as
D. Yan
324
v
v
σt (v) = σ (v) , ∀t ∈ T . The condition of the constant
standard deviation is slightly stronger than the formal definition of the stationary (wide sense) random
process in the textbook (Wong 1983); however, it is
more suitable for describing a temporal variation
process in radiotherapy.
Followed by the above definition, a temporal variation process can be described using the stationary
random process if its systematic variation and the
standard deviation of the random variation are constants within the entire course of radiotherapy; otherwise, it is a non-stationary random process. Most
of temporal variation process of patient/organ shape
and position in radiotherapy can be considered as a
stationary process. Examples of non-stationary process are most likely dose-response related, such as a
process of organ displacement with its mean displacement drifted due to reopening of atelectasis lung, a
process affected by organ filling that is changed by
radiation dose, or a process with a normal organ adjacent to a shrinking target.
A subprocess of intra-treatment variation,
v
{ ut (v) | t ∈ Ti }, can also be classified as the stationary
and non-stationary. In this case, example of the stationary process could be related to patient respiration induced organ motion. On the other hand, example of the
non-stationary process could be related to an organfilling process such as intra-treatment bladder filling.
25.3
Imaging and Verification
Imaging (sampling) patient/organ shape and position frequently during the treatment course is the
major means of verifying and characterizing anatomical variation in radiotherapy. Ideally, imaging
should be performed with patient setup in treatment
position and with a sampling schedule compatible
with the frequency of the temporal variation considered. Commonly, imaging schedule in an adaptive radiotherapy is pre-designed in the treatment protocol
based on specifications required for the estimation
and evaluation of temporal variation process parameters, which are further discussed in section 25.4.
Three modes of X-ray imaging have been implemented in the radiotherapy clinic to observe patient
anatomy-related temporal variation, which are radiographic, fluoroscopic, and volumetric CT imaging.
In addition, 4D CT image can also be created (Ford
et al. 2003; Sonke et al. 2003). Onboard imaging devices with partial or all three modes are commercially
available, which include onboard MV or kV imager,
in-room kV imager, CT on rail, tomotherapy unit with
onboard MV CT, and onboard cone-beam kV CT.
25.3.1
Verification with Radiographic Imaging
Onboard MV radiographic imaging has been used to
verify patient daily setup measured using the position of patient bony anatomy, or position of a region
of interest with implanted radio-markers. Normally,
the position error is determined using the rigid body
registration between a daily treatment radiographic
image and a reference radiographic image, most
likely a digital reconstructed radiographic (DRR)
image created in treatment planning. There have
been numerous methods on 2D X-ray to 2D X-ray
registration, which have been outlined in a survey
paper (Antonie Maintz et al. 1998). Capability of
using radiographic image for treatment verification
has been extensively studied and is conclusive. It can
be applied to determine bony anatomy position as a
surrogate to verify patient setup position. In addition,
it can also be used to locate implanted radio-markers’ position as a surrogate to verify the position of
a region of interest.
Patient/organ position displacement caused by a
rigid body motion at the ith treatment delivery has been
denoted using a vector of three translational parameters
and
parameters as
v matrix withvthree rotational
v a 3¥3
v
ut (v) = ∆ t ( p ) + Rt ( p ) ⋅ [ xr (v) − xr ( p ) ] , ∀v ∈ V ; t ∈ Ti,
⎡ δt(1) ⎤
v
⎥
⎢
where ∆ t ( p ) = ⎢ δt( 2) ⎥ is the translational vector with
⎢δ t( 3) ⎥
⎦
⎣
shift, δt ( j ), along jth axis determined with respect to a
reference point p pre-defined on the reference image.
Rt ( p ) = R (1) R ( 2 ) R (3) is the rotation matrix with respect
to the same reference point and rotation around individual axis, such that
0
0
⎛1
⎞
⎜
(1)
(1)
(1) ⎟
R = ⎜ 0 cos θt
− sin θ t ⎟ ,
⎜ 0 sin θ (1) cosθ (1) ⎟
t
t
⎝
⎠
⎛ cos θt( 2 ) 0 sin θ t( 2 ) ⎞
⎜
⎟
R ( 2) = ⎜
0
1
0 ⎟ and
⎜ − sin θt( 2 ) 0 cosθ t( 2 ) ⎟
⎝
⎠
( 3)
( 3)
⎛ cos θt
− sin θ t
0⎞
⎟
⎜
( 3)
( 3)
( 3)
R = ⎜ sin θt
0⎟
cosθ t
⎜ 0
0
1 ⎟⎠
⎝
Image-Guided/Adaptive Radiotherapy
325
representing the subrotation matrix around jth axis
by an angle θt ( j ). Since the displacements of all subvolumes in a region of interest are uniquely determined by the translational vector and rotation
matrix, only the six parameters, δ t( j ) ; θ t( j ), j = 1, 2, 3
, are needed to determine patient/organ rigid body
motion.
Conventionally, the translational vector,
v
∆ t , t = t1, ..., tn, observed using a portal imaging device before, during, and/or after treatment delivery,
have been used to represent the temporal variation
of patient setup error, when rotation error in patient
setup is insignificant.
25.3.2
Verification with Fluoroscopic Imaging
Fluoroscopy has been conventionally used to observe patient respiration-induced organ motion at
a treatment simulator to guide target margin design
in radiotherapy planning of lung cancer treatment.
Recently, due to the availability of onboard kV imaging, it is being applied to verify intra-treatment
organ motion induced by patient respiration (Hugo
et al. 2004). This verification has been established by
comparing the online portal fluoroscopy to the digital reconstructed fluoroscopy (DRF) created using
the 4D CT image. Respiration-induced organ motion
can be determined by tracking the motion of a landmark or a radio-marker implanted in or close to the
organ of interest. Consequently, the frequency or the
density of the motion can be derived by calculating
the ratio of an accumulated time, within which the
patient respiration-induced displacement is equal to
a constant, versus the entire interval of breathing motion measurement (Lujan et al. 1999).
Symbolically, the motion frequency or density
function for a point of interest p can be calculated as
v
{ τ | uτ ( p) ≡ c , ∀τ ∈ Ti}
,
ϕ ( p, c ) =
Ti
v
where u o (p), o ŒTi is the respiratory displacement of
p measured using the fluoroscopic image within the
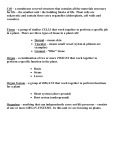
time interval Ti . Figure 25.2 shows a typical time-position curve of patient breathing motion of a point
of interest and its corresponding density function.
In clinical practice, both the respiratory motion and
its frequency are important for adaptive treatment
design and planning to compensate for a patient
respiration-induced temporal variation (Liang et al.
2003). For treatment planning purpose, fluoroscopic
image can be obtained in treatment position from
either a simulator or an onboard kV imager; how-
Fig. 25.2 A typical example of patient respiration-induced motion of a subvolume position and its corresponding position
density distribution
ever, onboard fluoroscopy is preferred for verifying
treatment delivery. Positions and frequency of points
of interest, specifically the mean and the standard
deviation of the displacement, measured from an online fluoroscopy, are compared with those pre-determined from the DRF created in the adaptive planning
to verify the treatment quality.
25.3.3
Verification with CT Imaging
Volumetric CT has been the most useful imaging
mode in verifying temporal variation of patient anatomy. Using this mode, the treatment dose in organs of
interest could be constructed. The treatment plan can
be designed in response to changes of patient/organ
shape and position during the therapy course; however, due to overwhelming information contained in
a 3D and 4D anatomical image, it also brings a great
challenge in the applications of volumetric image
feedback.
One of the most difficult tasks in applying volumetric image feedback in adaptive treatment planning is the image-based deformable organ registration. Unlike rigid body registration that has been
well developed and discussed everywhere, deformable organ registration is quite immature. Methods
D. Yan
326
of volumetric image-based deformable organ registration have been conventionally classified into
two classes (Antonie Maintz et al. 1998): the segmentation-based registration method and the voxel
property-based registration method. Segmentationbased registration utilizes the contours or surface of
an organ of interest delineated from the reference
image to elastically match the organ manifested on
the second image (McInerney and Terzopoulos
1996). On the other hand, voxel property-based registration method utilizes mutual information manifested in two images to perform the registration
(Pluim et al. 2003). Both registration methods, in
principle, share a same problem on the interpretation of the rest of points of interest. Mathematically,
this problem can be described as for given condiv
tions {xr(v) | v DV } – the subvolume position of an
organ of interest manifested on the reference image
v
v
v
and { xt (v) = xr (v) + ut (v) | v ∈ ∂V ⊂ V } – the boundary condition of surface points or mutual informav
v
v
tion, determining { xt (v) = xr (v) + ut (v) | v ∈ V − ∂V }
– the rest of subvolume positions manifested on the
secondary image. Existing methods of interpretation are the finite element analysis that determines
subvolume position based on the mechanical con-
AP (cm)
stitutive equations and tissue elastic properties, and
the direct interpretation of using a linear or a spline
interpolation. Applications in radiotherapy include
using the finite element method to perform CT image-based deformable organ registration for organs
of interest in the prostate cancer treatment (Yan et
al. 1999), the GYN cancer treatment (Christensen
et al. 2001) and the liver cancer treatment (Brock et
al. 2003). Deformable organ registration followed by
volumetric image feedback provides the distribution
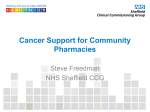
of organ subvolume displacements (Fig. 25.3), which
plays an important role in the adaptive or 4D planning; however, there is no clear answer thus far as to
what degree of registration accuracy can be achieved
utilizing each interpretation method and what is
needed for an adaptive treatment planning.
Two types of sequential CT imaging have been
applied in adaptive treatment planning. The first
one has a longer elapse (day or days) of imaging
(sampling) to primarily measure an inter-treatment
temporal variation. Clinical applications of using
multiple daily images have been limited to prostate
cancer treatment (Yan et al. 2000), colon-rectal cancer treatment (Nuyttens et al. 2002), and head and
neck cancer treatment. The second sequential imag-
SI (cm)
RL (cm)
Fig. 25.3 A typical example of subvolume displacement distribution for a bladder wall and a rectal wall. The color map from red
to blue indicates the range (large to small) of the standard deviation of each subvolume displacement in centimeters
Image-Guided/Adaptive Radiotherapy
ing has been aimed to detect organ motion induced
by patient respiration. These images, which manifest
organs of interest at different breathing phases, can
be obtained from a respiratory correlated CT imaging (Ford et al. 2003) or a slow rotating cone-beam
CT (Sonke et al. 2003). Clinical application of this
measurement has been focused on lung cancer treatment; however, it has no limit to be extended to the
other cancer treatment where patient respiration effect is significant, such as liver cancer treatment. In
principle, both types of sequential imaging are 4D
CT imaging, although the terminology of 4D CT imaging has been specifically used to describe the 3D
sequential CT images induced by patient respiration.
Commonly, either an onboard or an off-board volumetric imager can be applied to measure patient organ motion for the purpose of offline planning modification; however, onboard imaging is a favorable tool
for both online and offline treatment planning modification and adjustment.
25.4
Estimation and Evaluation
It has been discussed that temporal variation of
patient/organ shape and position during the whole
treatment course could be modeled as a random
process of organ subvolume displacement, denoted
n
⎧v
⎫
⎨ ut (v) | t ∈ U Ti ⊂ T ⎬ , ∀v ∈ V , or multiple
i =1
⎩
⎭
subprocesses during each treatment delivery, denoted
v
as { ut (v) | t ∈ Ti } , ∀v ∈ V ; i = 1,..., n. The former has
been primarily considered in the design of offline
imaging and planning modification as indicated as
the outer loop of the adaptive system in Fig. 25.1;
the latter, on the other hand, has to be considered
additionally in the design of online image-guided
adjustment – the inner loop of Fig. 25.1. Although
process parameter estimation and treatment evaluation are normally performed in the outer feedback
loop, they will be utilized to modify and update the
planning and adjustment parameters for both offline
and online planning modification and adjustment.
As has been discussed in section 25.2, the key
parameters of a temporal variation process are the
systematic variation and the standard deviation of
random variation of subvolume displacement [see
also Eq. (4)]. These parameters, therefore, have to be
estimated for either offline or online mechanisms.
Moreover, the cumulative dose/volume relationship
as
327
of organs of interest and the corresponding biological indexes can also be estimated and evaluated. In
addition, effects of dose per fraction on a critical normal organ should also be considered in the cumulative dose evaluation when online image guided hypofractionation is implemented, because the effect of
temporal variation of organ fraction dose can be significantly enlarged in a hypo-fractionated treatment
(Yan and Lockman 2001).
Multiple imaging (or sampling) performed in the
early part of treatment has been the common means
v
to estimate the mean µt (the systematic variation)
v
and the standard deviation σt (the characteristic of
the random variation) of a temporal variation process. Estimation can be performed once using multiple images obtained early in treatment course, in
batches, or continuously. In general, imaging schedule in an adaptive radiotherapy system has been
selected in a treatment protocol based on a pre-designed strategy of adaptive treatment. In case of the
single offline adjustment of patient position during
the treatment course, optimal sampling schedule of
four to five observations obtained daily in the early
treatment course has been suggested (Yan et al. 2000)
and proved to be a favorable selection with respect
to the criteria of minimal cumulative displacement
(Bortfeld et al. 2002); however, so far, there has not
been any systematic study to explore the relationship
between the imaging schedule and the treatment
dose/volume factor. A preliminary study (Birkner
et al. 2003) demonstrated that there was only a marginal improvement for prostate cancer IMRT, when
offline-planning modification is continuously performed compared with a single modification after
five measurements. Parameter estimation for a given
temporal variation process could be straightforward.
Example of such process is the organ motion induced
by patient respiration. In this case, the motion can be
characterized using 4D CT imaging and fluoroscopy
before the treatment if the process is stationary; otherwise, the estimation can be performed multiple
times during the treatment course.
25.4.1
Parameter Estimation for a Stationary Temporal
Variation Process
v
Without loss of generality, let uti | ti ∈ T ; i = 1, ..., k
be the measurements (the sample size k is commonly
small except for the respiratory motion) of subvolume displacement for an organ of interest obtained
from k CT image measurements, or displacement of
{
}
D. Yan
328
a reference point when radiographic images or fluoroscopy are used for the measurements. The stanv
dard unbiased estimations of the constant mean, µ,
v
and the constant standard deviation, σ , based on the
measurements are
v 1 k v
v
µˆ = ∑ uti ; σˆ =
k i =1
1 k v vˆ 2
∑ (ut − µ ) .
k − 1 i =1 i
In addition, the potential residuals between the true
and the estimation can also be evaluated based on the
standard confidence interval estimation as
v
σ
k − 1 ˆv
v v
v
µˆ − µ ≤ tα / 2, k − 1 ⋅
; σ ≤
⋅σ ,
χ12− α , k − 1
k
where the factor tα / 2, k− 1 has the 2t-distribution
with k-1 degrees of freedom and χ1− α, k − 1 has the
χ 2 − distribution with k-1 degrees of freedom, and
both them have the confidence 1- α.
The other method of estimating the systematic
variation is the Wiener filtering (Wiener 1949).
Applying the Wiener filtering theory, the optimal estimation of the systematic variation is constructed
by minimizing the expectation of the estimation
and
v v
v
v v v
the truth, such as Min E ⎡⎣( µˆ − µ ) 2 | ut1, ..., utk , Σµ, Μσ ⎤⎦,
with conditions of the k measurements, the standard
deviation of the individual systematic variations,
⎛σ µ
0
0 ⎞
⎜ 1
⎟
v
Σ µv = ⎜ 0 σ µ2
0 ⎟,
⎜⎜
⎟
0 σ µ3 ⎟⎠
⎝ 0
and the root-mean-square of the individual standard
deviations of the random variations,
⎛ µσ 1
0
0 ⎞
⎜
⎟
v
0 ⎟.
Μσv = ⎜ 0 µσ 2
⎜⎜
⎟
0 µσ 3 ⎟⎠
⎝ 0
Consequently, the estimation of the systematic variation is
v
v
v −1
1 k v
v
µˆ = c ⋅ ∑ uti , c = k ⋅ Σ µv ⋅ ( k ⋅ Σµv + Μσv ) .
k i =1
It has vbeen proved
that for a temporal variation
v
process, Σ µv and Μ σv could have similar values; therefore, the Wiener estimation can be simplified as
k
1
v
v
µˆ =
⋅ ∑ uti.
k + 1 i =1
In addition to the mean and the standard deviation, knowledge of the probability density ϕ (v ) of
each subvolume displacement in a temporal variation process could also be useful; however, except for
patient respiratory motion that can be determined
directly using 4D CT and fluoroscopy (as described
in section 25.3.2), the majority of temporal variations
can only be practically measured a few times, and using these small numbers of measurements to estimate
a probability distribution is most unlikely possible.
Therefore, pre-assumed normal distribution has
been applied in the clinic. It has been demonstrated
that the actual treatment dose in an organ subvolume
is most likely determined by its systematic variation
and the standard deviation of its random variation.
The actual shape of the displacement distribution
is less important (Yan and Lockman 2001); therefore, the pre-assumption of the normal distribution,
v
v
ϕˆ (v ) = N µˆ (v), σˆ 2 (v) , is acceptable in the treatment
dose estimation.
Parameter estimation of stationary temporal
variation process can be applied for both offline and
online feedback. Examples of offline feedback include using multiple radiographic portal imaging to
characterize patient setup variation, multiple CT imaging to characterize internal organ motion, and 4D
CT/fluoroscopy imaging to characterize respiratory
organ motion. Application for online feedback is currently limited to characterize intra-treatment organ
motion assessed by multiple portal imaging and portal fluoroscopy. For the online CT image-guided prostate treatment, parameter estimation for intra-treatment variation also depends on patient anatomical
conditions. There has been a study (Ghilezan et al.
2003) that showed that the intra-treatment variation
of prostate position was primarily controlled by the
rectal filling conditions.
(
)
25.4.2 Parameter Estimation for a
Non-stationary Temporal Variation Process
Parameters to be estimated in a non-stationary
process are similar to those in a stationary process;
however, instead of constants, they can be piecewise
constants, such as respiration-induced organ motion
during lung cancer treatment, or a continuous function of time, such as bladder-filling-induced motion
during treatment delivery. It is relatively simple to estimate the process parameters that are piecewise constants. The estimation in each constant period will be
performed as same as the one for a stationary process;
however, the estimation for a process with parameter
as a continue function will be less straightforward.
The most common method to estimate a function
based on finite number of samples is the least-squares
estimation.v With pre-selected orthogonal base of
functions φ ( j ) (t ) = ⎡⎣φ1( j ) (t ) φ 2( j ) (t ) ⋅⋅⋅ φm( j ) (t ) ⎤⎦, i.e.
Image-Guided/Adaptive Radiotherapy
329
φi( j ) (t ) = t i −1, i = 1, 2,..., m, the estimations for both
the systematic variation and the standard deviation
of the random variation are
k
µˆ
( j)
t
m
=∑a
( j)
i
⋅φ (t ); σˆ
( j)
i
( j)
t
=
∑ (u
i =1
i =1
( j)
ti
− µˆ t(i j ) ) 2
k−m
,
j = 1, 2, 3, where
v
⎡ut(1 j ) ⎤
⎡φ ( j ) (t1 ) ⎤
⎡ a1( j ) ⎤
⎢ ⎥
−1
⎥
⎢
⎥
⎢
T
T
⎢ ⯗ ⎥ = ( Φ ⋅ Φ ) ⋅ Φ ⋅ ⎢ ⯗ ⎥ ; Φ = ⎢ v ⯗ ⎥.
⎢u ( j ) ⎥
⎢φ ( j ) (tk ) ⎥
⎢ am( j ) ⎥
⎦
⎣
⎦
⎣
⎣ tk ⎦
As the extension of the Wiener filter, the Kalman
filter has also been applied to estimate the systematic variation for a non-stationary process assuming
that the systematic variation is a linear function of
time (Yan et al. 1995; Lof et al. 1998; Keller et al.
2004). In addition, similar to the description in the
previous section, the probability density of each
subvolume displacement can be estimated as ϕˆt (v)
for a respiratory motion or a normal distribution
v
v
ϕˆt (v) = N µˆ t (v), σˆt 2 (v) .
Applications of parameter estimation for a nonstationary process have been few. One study (Ford
et al. 2002) attempted to determine the reproducibility of patient breathing-induced organ motion.
It revealed that the mean of patient respiration-induced organ motion could considerably vary during
the course of NSCLC due to treatment and patient
related factors; therefore, multiple measurements of
4D CT and fluoroscopy, i.e., once a week, may be necessary to manage adaptive treatment of lung cancer.
Regarding parameter estimation for a continuous
function, one study (Heidi et al. 2004) has been performed to estimate bladder expansion and potential
standard deviation for the online image-guided bladder cancer treatment, where bladder subvolume position was modeled as a linear function of time.
(
)
25.4.3
Estimation of Cumulative Dose
Including temporal variation in cumulative dose
estimation can be performed using the knowledge
of subvolume displacement distribution. At present, the construction is performed assuming time
invariant spatial dose distribution calculated from
the treatment planning. It implies that the dose distribution remains constant spatially regardless the
changes of patient anatomy; however, this assumption can only be acceptable if spatial dose variation
induced by the changes of patient body shape and
tissue density is insignificant, i.e., during the prostate cancer treatment; otherwise, the dose has to
be recalculated using each new feedback image. Of
course, this can only be performed when CT image
feedback is applied.
Cumulative dose for each subvolume in the organ
of interest can be evaluated as
or
with considering the biological effect of dose per fraction, where ds is the standard
fraction dose 1.8 or 2 Gy. This dose expression is a
very general and can be simplified based on the attributes of a temporal variation.
For a stationary process with the time invariance
dose distribution, the cumulative dose in an organ of
interest can be estimated directly utilizing the probability density of subvolume displacement ^ (v) and
the planned dose distribution dp as
(5)
if the planned dose per treatment fraction is fixed.
When an offline planning modification is performed
at the k+1 treatment delivery, based on the previous
k image measurements, then the cumulative dose
can be estimated by considering the treatments
which have been delivered (Birkner et al. 2003),
such that
.
The estimation can also be performed using the
mean and the standard deviation of a temporal variation (Yan and Lockman 2001), such that
where
the interval
curvature at point
(6)
is the mean dose gradient in
, and
is the dose
.
Equation (6) provides a very important structure on
the parameter design of adaptive planning and adjustment (discussed in the next section).
Using the estimated dose, radiotherapy dose response parameters, such as the EUD, NTCP, and TCP,
can be evaluated using the common methods that
have been discussed elsewhere.
D. Yan
330
25.5
Design of Adaptive Planning and Adjustment
25.5.2
Adaptive Planning and Adjustment Parameters
Design of adaptive planning and adjustment contains computation and rules to select planning and
adjustment parameters, and to update the schedule
of imaging, delivery, and adjustment. Ideally, imaging/verification, estimation/evaluation, and planning/adjustment should be performed with the
identical sampling rates, and the planning/adjustment parameters should be selected in such way that
the adaptive radiotherapy system can be completely
optimized; however, this is most unlikely possible
when clinical practice is considered. Only a few possibilities have been investigated and are discussed
here.
Given organs of interest, the target and surrounding
critical normal structures, the aim of an adaptive
treatment planning is to design and modify treatment dose distribution in response to the temporal variations observed in the previous treatments.
Considering the dose expressed in Eq. (6), four factors play the key roles on treatment quality and can
be considered in the adaptive treatment planning
and adjustment design; these are two patient/organv
geometry related factors, the systematic variation µ
v
and the standard deviation of the random variation σ
for each subvolume in the organs of interest, and two
patient dose-distribution-related factors, the dose
gradient ¢dt and the dose curvature
25.5.1
Design Objectives
Objectives in the design of adaptive planning/adjustment are commonly specified in an adaptive
treatment protocol. The objectives are (a) to improve treatment accuracy by reducing the systematic variation, (b) to reduce the treated volume and
improve dose distribution by reducing the systematic variation and compensating for patient specific
random variation, (c) to reduce the treated volume
and improve dose distribution by reducing the both
systematic and random variations, and (d) to additionally improve treatment efficacy by alternating
daily dose per fraction and number of fractions.
Clearly, an objective has to be selected based on
expected treatment goals and available technologies. The first two can be implemented using an
offline feedback technique. Conversely, online image
guided adjustment or planning modification has to
be implemented to achieve the objectives (c) or (d).
Most of offline techniques have implemented the replanning and adjustment once during the treatment
course, except for the case when a large residual appeared in the estimation. On the other hand, most
of online techniques have aimed to adjust patient
treatment position only by moving the couch and/
or beam aperture; therefore, it is also important to
implement a hybrid technique, where offline planning is performed to modify the ongoing treatment
plan in certain time intervals (e.g., weekly) during
online daily adjustment process.
∂2 dt
v at each
∂x 2
spatial point in the region of interest. Theoretically,
any treatment planning and adjustment parameter,
which can control these factors, can be selected to
modify and improve the treatment.
Planning and adjustment parameters can be divided
into two classes: one contains patient-positioning parameters, such as couch position and rotation, beam
angle, and collimator angle, which can be applied to
reduce both the systematic and random variations
v v
{µ, σ }; however, these parameters can only adjust
variations induced by rigid body motion and improve position accuracy and precision, but have limits to manage variations induced by organ deformation and cannot improve treatment plan qualities;
the other contains dose-modifying parameters, such
as target margin, beam aperture, beam weight, and
beamlet intensities. These parameters are typically
used to adjust dose distribution, thus modifying
⎧
∂ 2 dt ⎫
⎨ ∇ dt , v 2 ⎬
∂x ⎭
⎩
in the region of interest to improve
ongoing treatment qualities. In addition, prescription
dose, dose per fraction, and number of fractions have
also been used as parameters for adaptive planning
(Yan 2000).
25.5.3
Adaptive Planning and Adjustment Parameter
and Schedule: Selection and Modification
In an ideal adaptive radiotherapy system, design of
planning and adjustment should have a function of
automatically selecting on going planning/adjust-
Image-Guided/Adaptive Radiotherapy
331
ment parameters and schedules of imaging, delivery,
and adjustment; thus, a new treatment plan can be
calculated by including the observed temporal variations and estimation, optimized using the selected
parameters and executed with the new schedules. In
principle, a set of pre-specified rules and control laws
could be used in the design, which match the parameters of temporal variation process to the parameters
and schedules of adaptive planning and adjustment.
Basic rules can be created utilizing the discrepancies between the ideal treatment under the ideal
condition (i.e., no temporal variation occurs) and the
“actual” treatment that includes the temporal variations. The discrepancies can be either the organ volume/dose discrepancy, or the discrepancies of EUD,
TCP, and/or NTCP determined from the planned
dose, { D(v) | v ∈ Vi , i = 1,..., l} , in organs of interest,
Vi , calculated without considering temporal variations vs those determined from the estimated dose
Dˆ (v) | v ∈ Vi , i = 1,..., l
distribution
constructed
from a treatment plan created using pre-specified
planning/adjustment parameters and including
the estimation of temporal variations. A set of predefined tolerances { δV , δ D , δ EUD , δ TCP , δ NTCP } is
then used to test whether or not the discrepancies,
V (∆D ≤δ D ) ≤δ V , ∆EUD ≤δ EUD , ∆TCP ≤δ TCP , and/or
∆NTCP ≤ δ NTCP , hold within the predefined ranges. In
addition, these tolerances can also be utilized to evaluate and rank the potential treatment quality with
respect to different groups of planning/adjustment
parameters and adjustment methodology (offline
or online). Depended on the variation type (rigid
or non-rigid) and the objectives of planning/adjustment, the planning and adjustment parameters could
be selected as (a) couch position/rotation, beam angle, and/or collimator angle (online or offline position adjustment for a rigid body motion), (b) target
margin, beam aperture, beam weight (intensities),
and/or prescription dose (online or offline planning
modification), and (c) beamlet intensity, prescription
dose, and/or dose per fraction plus number of fractions (online planning modification). Contrarily, a
subset of patients, who have insignificant temporal
variation, can also be identified; therefore, no re-planning and adjustment are necessary for this subset.
There have been limited studies on utilizing control laws to automatically modify the planning and
adjustment parameters. A decision rule (Bel et al.
1993) has been proposed and applied for the offline
adjustment of systematic variation induced by daily
patient setup. This decision rule is constructed by
assuming the statistical knowledge of patient setup
variation, and automatically schedules the setup ad-
{
}
justment based on the estimated systematic variation,
and pre-designed “action levels.” The other method
to control the offline planning and adjustment has
been “no action level” but including estimated residuals in the target margin design, and primarily single
modification after four to five consecutive observations (Yan et al. 2000; Birkner et al. 2003). An early
investigation (Lof et al. 1998) on the adaptive planning has modeled the cumulative dose and beamlet
intensities (control parameters) recursively using a
linear system, and created a quadratic objective from
the prescribed doses and the estimated doses. Based
on the optimal control theory (Bryson and Ho 1975),
the intensity fluence adjustment therefore follows a
standard linear feedback law – a linear function of
the dose discrepancy in organs of interest. Intuitively,
the beamlet intensities in the treatment should be adjusted proportionally to the estimated dose discrepancy. Similar methodology has been also proposed
for adaptive optimization using the tomotherapy
delivery machine (Wu et al. 2002). In addition to
beam intensity fluence, a control law has also been
proposed to manipulate the prescription dose per
treatment fraction and the total number of treatment
fractions in an online image-guided process (Yan
2000). This control law utilizes temporal variation of
dose/volume of critical normal organs to select the
most effective dose of the fraction and the total number of fractions.
Most problems in adaptive radiotherapy are easily
described but hardly solved. Compared with a direct
4D inverse planning after k number of observations,
control laws derived from an ideal system model
commonly provide only limited roles in the clinical
implementation. For the clinical practice, most temporal variations of patient/organ shape and position
can be described using stationary random processes,
and therefore the control mechanism is straightforward. Applying one or few planning modifications,
the systematic variation can be maximally eliminated
and thus patient treatment can be significantly improved in an offline adjustment process. Residuals
are commonly inverse proportional to the frequency
of the verification, estimation, and adjustment. These
residuals could be significantly large to diminish the
anticipated gain of adaptive treatment for certain
patients; therefore, a decision rule should be applied
to modify the schedule of imaging and adjustment
if these patients are identified during the treatment
course.
Sampling rates of imaging/verification, estimation/evaluation, and adaptive planning/adjustment
should be scheduled to match the rate of the aimed
D. Yan
332
temporal variations. Mismatch results in significant
downgrading of the expected treatment quality;
therefore, before selecting objectives in an adaptive
treatment design, specifically for an online adjustment process, one should ensure that appropriate
sampling rates of imaging/verification, estimation/
evaluation, and adaptive planning/adjustment could
be implemented.
25.6
Adaptive Planning and Adjustment
Adaptive planning and adjustment are implemented
with the pre-design parameters. The adaptive planning is often performed including the temporal variations in the planning dose calculation; therefore, it
has also been called “4D treatment planning.” There
have been two methods to perform a 4D planning.
The first (indirect method) does not directly include
the temporal variation in the planning dose calculation. Instead, it constructs the PTV and margins of
organs at risk based on the characteristics of patient
specific temporal variations and a generic planned
dose distribution, and then performs a conventional
conformal or inverse planning accordingly. The second (direct method) performs treatment planning by
directly including the temporal variations in the dose
calculation as has been discussed in section 25.4.3.
The adaptive treatment plan designed with the expected dose distribution can best compensate for
the temporal variations. Consequently, pre-designed
target margin is either unnecessary or used only to
compensate for the residuals of the estimation.
25.6.1
Indirect Method
Planning technique in the indirect method is primarily the same as the conventional one except for
the definition of the planning target volume and the
margins of organs at risk. For a rigid body motion
without significant rotation, the patient specific target margin in each direction j after k observations
can be constructed by considering the residuals of the
estimations of the systematic and random variations
(Yan et al. 2000), such that
m( j ) (c j ) =tα / 2 ,k − 1 ⋅
σˆ
( j)
k
+cj ⋅
k−1
⋅ σˆ ( j ),
2
χ1− α , k − 1
2
where tα / 2 ,k − 1 and χ1− α , k − 1 have been defined in section 25.4.1. The factor cj is determined by ensuring
that the potential dose reduction in the target with
the corresponding margin is less than a pre-defined
dose tolerance δ , such that
⎤
⎡d p ( xr( j ))
⎥ ⋅ ϕˆ (ξ ( j ) ) ⋅ d ξ ( j )≤ δ ,
∆D(cj ) = n ⋅ ∫ ⎢
( j)
( j)
( j)
⎥
m
c
−
(
)
−∞ ⎢− dp( x r + ξ
)
j ⎦
⎣
∞
where dp ( xr( j ) ) is the planning dose around the
CTV edge xr( j ) on the j axis. ϕ̂ (ξ ( j ) ) is the estimated
σˆ ( j )
k
(the residual of the systematic variation) and the
probability distribution with the mean tα / 2, k − 1 ⋅
standard deviation
k−1
⋅ σˆ ( j ).
2
χ1− α , k − 1
It is clear that the calculation of dose discrepancy
here is approximated assuming the spatial invariance of planning dose distribution. In addition, this
evaluation can also be approximated using the dose
gradient and curvature around the CTV edge as indicated by Eq. (6), such that
∆D(c j ) ≈ n ⋅σˆ ( j )
⎞
⎛ tα / 2,k − 1 ∂d p
⋅ ( j ) [τ, π ]⎟
⎜
k ∂x
⎟
⋅⎜
≤δ .
⎜ σˆ ( j ) ∂2 d p (π ) ⎟
⎟
⎜+
⋅
∂x ( j ) 2 ⎠ τ =xr( j ) − m( j ) ( c j ); π =xr( j ) − m( j ) ( c j ) +tα / 2 ,k − 1 ⋅σˆ ( j )
⎝ 2
k
This method can be further extended to construct CTVto-PTV margin that compensates for much broad type
of variations including organ deformation. Let ∂CTV
represent the boundary of CTV, then the 3D margin
can be constructed using the vector normal to target
surface at each boundary point v ∈ ∂CTV , such that
v
σˆ (v)
k − 1 vˆ
v
m(c, v) = tα / 2,k − 1 ⋅
+c ⋅ 2
⋅ σ (v ) .
χ1− α , k− 1
k
Similarly, the c is determined such that the following
inequality
∆D(c, v) =
n⋅∫
R3
v
⎤
⎡ d p ( xr (v) )
v
v
⎥ ⋅ ϕˆ (ξ ) ⋅ dξ ≤ δ
⎢
v
v
v
⎢⎣ − d p ( xr (v)+ ξ (v) − m(c, v) )⎥⎦
Image-Guided/Adaptive Radiotherapy
333
holds; therefore, the patient-specific PTV can be
formed by creating a new surface with the vectors
v
m(c, v),∀ v∈ ∂CTV .
Typical adaptive planning/adjustment with using the indirect method includes (a) using imaging
measurements to perform the estimation, (b) adjusting patient position or beam aperture to correct the
estimated systematic variation, (c) constructing a
patient specific PTV, and (d) performing a conventional treatment planning or inverse planning. Since
patient-specific PTV construction is also dependent
on the planning dose distribution, primarily the dose
gradient and curvature around the neighborhood of
the CTV edge, control parameters, which can directly
adjust the dose gradient and curvature, are important
for the adaptive treatment planning.
25.6.2
Direct Method
In the direct method of 4D planning, temporal variations are directly included in the planning dose calculation. Consequently, dose distribution in the neighborhood of each subvolume of organs of interest can
be designed by selecting beam aperture or modulating beam intensity fluence to effectively compensate for the systematic and the random variations
estimated from previous observations; therefore, parameters of temporal variation and dose distribution
are automatically included in the treatment planning
optimization. However, because the position of each
subvolume in a 4D planning is a distribution function
rather than static, it considerably increases the time
and complicity of the dose calculation.
Most 4D adaptive planning have been completed
using an inverse planning engine that searches the
optimal beam intensity fluence based on the objective function calculated using the estimated dose discussed in section 25.4.3. Objective function and search
algorithm commonly remain the same as those in the
conventional inverse planning, but dose computation
or estimation is much time-consuming, specifically
when including feedback volumetric CT images in
the computation becomes necessary. Some simplifications on dose computation have been applied to
reduce the calculation time. One study (Birkner et
al. 2003) has directly included the samples of organ
subvolume displacement in the dose estimation during the inverse planning iteration, such that for each
subvolume, v, the expected dose after k treatment delivery is computed as
Fig. 25.4 Dose distribution (colored isodose lines) calculated
from a 4D inverse planning of prostate cancer superimposed
on the organ occupancy density (gray area)
k
(n − k )
v
Dˆ (v, Φ ) = ∑ dt ( xt (v) ) +
k2
t =1
v
v
v
⋅ ∑ d ( xr (v) + ui (v) + w j (v), Φ)
(7)
k
i , j =1
v
where uj (v) is the sample of subvolume displacev
ment induced by internal organ motion, and wj (v)
is the sample of subvolume displacement induced
from patient setup. \ is the beam-intensity map to
be optimized. It has been demonstrated that the optimization result converges after five observations in
an offline adaptive process for prostate cancer radiotherapy. Figure 25.4 shows a typical dose distribution
from the 4D inverse planning, where the dose gradient and curvature in the adjacent region between
target and normal structure were designed to best
compensate for the variations induced from treatment setup and internal organ motion.
The fundamental difference between the 4D planning in an offline process and the one in an online
process is the dose construction in the objective function. Offline 4D planning aims to optimize treatment
plan for all remaining treatment. Meanwhile, online
D. Yan
334
4D planning aims to optimize treatment plan for the
current treatment; however, both need to include previous measurements in the dose construction. On the
other hand, in addition to beam aperture, intensity
fluence and prescription dose, extra planning parameters, such as dose per fraction and number of
fractions, can also be considered in an online process.
In this case, a treatment planning is performed before each treatment delivery by including all previous observations to optimize the intensity map and
prescription dose for the current fraction, as well as
estimating the total number of fractions (Yan 2000).
Before the kth treatment delivery, the cumulative dose
in the online treatment planning is constructed including the previous k-1 treatment deliveries as
v
β
⎞
⎛ k−1
v
α + d t ( xt (v ) )
⎟
⎜ ∑ dt ( xt (v) ) ⋅
β
nˆ t =1
α + ds
⎟
ˆ = ⎜
Dˆ (v, Φ, dk, n)
v
β
⎟
k⎜
v
α + d k ( xk (v ), Φ)
⎟
⎜ + d k ( xk (v), Φ) ⋅
β
⎟
⎜
α + ds
⎝
⎠
(8)
where planning parameters, {Φ, dk , nˆ}, are the beam
intensity map, the prescription dose for the k fraction, and the number of fractions.
25.7
Adaptive Treatment Protocol
Clinical protocol of adaptive treatment provides a
structure and work flow of the image feedback and
adaptive planning system. As indicated in Fig. 25.1,
schedules of imaging, delivery, and planning/adjustment for the patient treatment are pre-defined in
a protocol based on the feedback mechanism, offline or online, and nature of the temporal variation
process (stationary or non-stationary). In addition,
these schedules can be updated based on the feedback observations. At present, study on the schedule
optimization has been limited.
There could be many selections of adaptive control
mechanisms for a given treatment site and desired
treatment objectives. Two examples, which have being currently implemented in a radiotherapy clinic,
are outlined here. Instead of describing the whole
protocol, procedures that directly link to the technical aspects of the adaptive treatment are described,
which include the structures of imaging/verification,
estimation/evaluation, parameter design and adaptive planning/adjustment.
25.7.1
Example 1: Image-Guided/Adaptive
Radiotherapy for Prostate Cancer
Pre-treatment plan with respect to four-field box
technique or inverse planning is designed to deliver
daily fraction dose of 3.9 Gy to target isocenter for
total 15 fractions. The feedback loops include an online CT image guided adjustment, and an offline CT
image-guided planning modification.
Inner feedback loop (online) in the adaptive RT system (Fig. 25.1)
1. Imaging/verification: CT imaging acquired using
an onboard kV cone-beam device before treatment delivery for patient at the treatment position.
Simulating couch motion and collimator rotation
to align a template of target outline pre-defined
on the reference image to the target manifested on
the online image. Compare the motions against to
the pre-defined tolerances
2. Adjustment: adjusting couch position and collimator rotation accordingly, if necessary
Outer feedback loop (offline) in the adaptive RT system (Fig. 25.1)
1. Imaging/verification:
after each five treatment deliveries, performing
deformable organ registration for the daily CT
images
2. Estimation/evaluation:
estimating the parameters of temporal variation,
and the cumulative dose for organs of interest
3. Design of planning/adjustment:
If ∆CTV (∆Dˆ ≤δD %) ≤ δV % due to target shape
change, and/or if the shape and position of organs
at risk change significantly, arranging a 4D planning with planning parameter of beam aperture
or beam intensity fluence
4. Adaptive planning/adjustment:
performing the 4D planning and adjusting the ongoing treatment accordingly
25.7.2
Example 2: Image-Guided/Adaptive
Radiotherapy for NSCLC
Pre-treatment planning is performed with respect to
the target (GTV) at the mean respiratory position
determined using a 4D CT image and fluoroscopy. A
patient-specific PTV is constructed using the indirect
Image-Guided/Adaptive Radiotherapy
method discussed in section 25.6.1. The treatment
plan is designed to deliver daily dose of 3.0 Gy (bid)
to the minimum of PTV dose for total 47 fractions.
The feedback loops include online fluoroscopyguided adjustment and offline 4D CT image-guided
planning modification.
Inner feedback loop (online) in the adaptive RT system (Fig. 25.1)
1. Imaging/verification:
fluoroscopic
imaging
acquired using an onboard kV cone-beam device
before treatment delivery for patient at the treatment position
2. Identify the mean respiratory position for a region
or point of interest, and compare it with that predetermined at the treatment planning with respect
to a pre-defined tolerance
3. Adjustment: adjusting couch position accordingly,
if necessary
Outer feedback loop (offline) in the adaptive RT system (Fig. 25.1)
1. Estimation/evaluation: determine the standard
deviation of the respiratory motion measured
from the daily fluoroscopy
2. Design of planning/adjustment: if the standard
deviation is larger, with respect to a pre-defined
tolerance, than the one determined in the preplanning, acquire a new 4D CT image and perform
a new 4D planning
3. Adaptive planning/adjustment: performing the
4D planning and adjustment accordingly
25.8
Summary
Adaptive radiotherapy system is designed to systematically manage treatment feedback, planning, and
adjustment in response to temporal variations occurring during the radiotherapy course. A temporal
variation process, as well as its subprocess, can be
classified as a stationary random process or a nonstationary random process. Image feedback is normally designed based on this classification, and the
imaging mode can be selected as radiographic imaging, fluoroscopic imaging, and/or 3D/4D CT imaging,
with regard to the feature and frequency of a patient
anatomical variation, such as rigid body motion and/
or organ deformation induced by treatment setup, organ filling, patient respiration, and/or dose response.
Parameters of a temporal variation process, as well as
335
treatment dose in organs of interest, can be estimated
using image observations. The estimations are then
used to select the planning/adjustment parameters
and the schedules of imaging, delivery, and planning/adjustment. Based on the selected parameters
and schedules, 4D adaptive planning/adjustment are
performed accordingly.
Adaptive radiotherapy represents a new standard
of radiotherapy, where a “pre-designed adaptive
treatment strategy” a priori treatment delivery will
replace the “pre-designed treatment plan” by considering the efficiency, optima, and also clinical practice
and cost.
Acknowledgements
The work presented in this chapter was supported in
part by NCI grants CA71785 and CA091020.
References
Antonie Maintz JB, Viergever MA (1998) Medical image analysis, vol 2. Oxford University Press, Oxford, pp 1–38
Astrom KJ, Wittenmark B (1995) Adaptive control, 2nd edn.
Addison-Wesley, Reading, Massachusetts
Bel A et al. (1993) A verification procedure to improve patient
setup accuracy using portal images. Radiat Oncol 29:253–260
Birkner M et al. (2003) Adapting inverse planning to patient
and organ geometrical variation: algorithm and implementation. Med Phys 30:2822–2831
Bortfeld T et al. (2002) When should systematic patient positioning errors in radiotherapy be corrected? Phys Med Biol
47:N297–N302
Brierley JD et al. (1994) The variation of small bowel volume
within the pelvis before and during adjuvant radiation for
rectal cancer. Radiother Oncol 31:110–116
Brock KK et al. (2003) Inclusion of organ deformation in dose
calculations. Med Phys 30:290–295
Bryson AE Jr, Ho YC (1975) Applied optimal control. Hemisphere Publishing Corporation, Washington, DC
Christensen GE et al. (2001) Image-based dose planning of
intracavitary brachytherapy registration of serial-imaging
studies using deformable anatomic templates. Int J Radiat
Oncol Biol Phys 51:227–243
Davies SC et al. (1994) Ultrasound quantitation of respiratory
organ motion in the upper abdomen. Br J Radiol 67:1096–
1102
Ford EC et al. (2002) Evaluation of respiratory movement
during gated radiotherapy using film and electronic portal
imaging. Int J Radiat Oncol Biol Phys 52:522–531
Ford EC et al. (2003) Respiration-correlated spiral CT: a method
of measuring respiratory-induced anatomic motion for
radiation treatment. Med Phys 30:88–97
Ghilezan M et al. (2003) Prostate gland motion assessed with
cine magnetic resonance imaging (cine-MRI). Int J Radiat
Oncol Biol Phys 62:406–417
336
Halverson KJ et al. (1991) Study of treatment variation in the
radiotherapy of head and neck tumors using a fiber-optic
on-line radiotherapy imaging system. Int J Radiat Oncol
Biol Phys 21:1327–1336
Heidi L et al. (2004) A model to predict bladder shapes from
changes in bladder and rectal filling. Med Phys 31:1415–
1423
Hugo G et al. (2004) A method of portal verification of 4D lung
treatment. Proc XIIIIth International Conference on The
Use of Computers in Radiotherapy (ICCR), Seoul, Korea
Keller H et al. (2004) Design of adaptive treatment margins
for non-negligible measurement uncertainty: application
to ultrasound-guided prostate radiation therapy. Phys Med
Biol 49:69–86
Liang J et al. (2003) Minimization of target margin by adapting treatment planning to target respiratory motion. Int J
Radiat Oncol Biol Phys 57:S233
Lof J et al. (1998) An adaptive control algorithm for optimization of intensity modulated radiotherapy considering
uncertainties in beam profiles, patient setup and internal
organ motion. Phys Med Biol 43:1605–1628
Lujan AE et al. (1999) A method for incorporating organ
motion due to breathing into 3D dose calculation. Med
Phys 26:715–720
Marks JE, Haus AG (1976) The effect of immobilization on
localization error in the radiotherapy of head and neck
cancer. Clin Radiol 27:175–177
McInerney T, Terzopoulos D (1996) Deformable models in
medical image analysis: a survey. Med Image Anal 1:91–
108
Moerland MA et al. (1994) The influence of respiration induced
motion of the kidneys on the accuracy of radiotherapy
treatment planning: a magnetic resonance imaging study.
Radiol Oncol 30:150–154
Nuyttens JJ et al. (2001) The small bowel position during adjuvant radiation therapy for rectal cancer. Int J Radiat Oncol
Biol Phys 51:1271–1280
Nuyttens J et al. (2002) The variability of the clinical target
volume for rectal cancer due to internal organ motion
during adjuvant treatment. Int J Radiat Oncol Biol Phys
53:497–503
D. Yan
Pluim JPW et al. (2003) Mutual information based registration of medical images: a survey. IEEE Trans Med Imaging
10:1–21
Roeske JC et al. (1995) Evaluation of changes in the size and
location of the prostate, seminal vesicles, bladder, and
rectum during a course of external beam radiation therapy.
Int J Radiat Oncol Biol Phys 33:1321–1329
Ross CS et al. (1990) Analysis of movement of intrathoracic
neoplasms using ultrafast computerized tomography. Int J
Radiat Oncol Biol Phys 18:671–677
Sonke J et al. (2003) Respiration-correlated cone beam
CT: obtaining a four-dimensional data set. Med Phys
30:1415
Van Herk M et al. (2000) The probability of correct target
dosage: dose-population histograms for deriving treatment margins in radiotherapy. Int J Radiat Oncol Biol Phys
47:1121–1135
Wiener (1949) Extrapolation, interpolation and smoothing of
stationary time series. M.I.T. Press, Cambridge, Massachusetts
Wong E (1983) Introduction to random processes. Springer,
Berlin Heidelberg New York
Wu C et al. (2002) Re-optimization in adaptive radiotherapy.
Phys Med Biol 47:3181–3195
Yan D (2000) On-line adaptive strategy for dose per fraction
design. Proc XIIIth International Conference on The Use
of Computers in Radiotherapy. Springer, Berlin Heidelberg
New York
Yan D, Lockman D (2001) Organ/patient geometric variation
in external beam radiotherapy and its effects. Med Phys
28:593–602
Yan D et al. (1995) A new model for “Accept Or Reject” strategies in on-line and off-line treatment evaluation. Int J
Radiat Oncol Biol Phys 31:943–952
Yan D et al. (1999) A model to accumulate the fractionated
dose in a deforming organ. Int J Radiat Oncol Biol Phys
44:665–675
Yan D et al. (2000) An off-line strategy for constructing a
patient-specific planning target volume for image guided
adaptive radiotherapy of prostate cancer. Int J Radiat Oncol
Biol Phys 48:289–302