Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
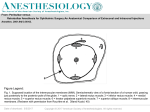
SCIENCE CHINA Physics, Mechanics & Astronomy • Article • May 2014 Vol.57 No.5: 983–987 doi: 10.1007/s11433-013-5227-x Using the traditional model to evaluate the active force of the human lateral rectus muscle GAO ZhiPeng1, CHEN WeiYi1*, JING Lin2, FENG PengFei1, WU XiaoGang1 & GUO HongMei1 1 2 Institute of Applied Mechanics and Biomedical Engineering, Taiyuan University of Technology, Taiyuan 030024, China; Impact Mechanics Laboratory, Department of Mechanical Engineering, National University of Singapore, Singapore 117576, Singapore Received December 25, 2012; accepted February 18, 2013; published online March 13, 2014 The information on the force of extraocular muscles (EOMs) is beneficial for strabismus diagnosis and surgical planning, and a direct and simple method is important for surgeons to obtain these forces. Based on the traditional model, a numerical simulation method was proposed to achieve this aim, and then the active force of the lateral rectus (LR) muscle was successfully simulated when the eye rotated every angle from 0° to 30° in the horizontal plane from the nasal to the temporal side. In order to verify these simulations, the results were compared with the previous experimental data. The comparison shows that the simulation results diverged much more than the experimental data in the range of 0°–10°. The errors were corrected to make the simulation results closer to the experimental data. Finally, a general empirical equation was proposed to evaluate the active force of the LR muscle by fitting these data, which represent the relationship between the simulation forces and the contractive amounts of the LR muscle. force, extraocular muscles, lateral rectus muscle, eye movement model PACS number(s): 07.10.Pz, 87.19.Ff, 87.15.Aa Citation: Gao Z P, Chen W Y, Jing L, et al. Using the traditional model to evaluate the active force of the human lateral rectus muscle. Sci China-Phys Mech Astron, 2014, 57: 983987, doi: 10.1007/s11433-013-5227-x 1 Introduction Eye movement is controlled by extraocular muscles (EOMs), which are also related to some eye diseases, such as nystagmus, saccade and strabismus. Especially for strabismus, the information on the force of EOMs is beneficial for strabismus diagnosis and surgical planning [1]. Based on the mechanics equilibrium theory, the traditional eye movement model was proposed [2,3]. Recently, with the discovery of pulley of the rectus muscles [4], several novel models [5–7] were proposed. Finite element method (FEM) was used to simulate the force of four rectus muscles [5]; a method [6] was proposed to cal*Corresponding author (email: [email protected]) © Science China Press and Springer-Verlag Berlin Heidelberg 2014 culate the activation of EOMs; and the more detailed situation of eye three-dimensional movement was simulated by using the OrbitTM software [7]. The Hill-muscle constitutive model [8] was used in these novel models [6,7] to derive the force of EOMs. Moreover, the motor unit of EOMs was measured by chronically implanting the muscle force transducer in alert [9,10]; and in the microscopic neurophysiology and biochemistry, the action of calcium related to the force of EOMs was also studied [11]. Although these advanced invasive techniques [9,11] and the novel models [6,7] can effectively help understand the detailed microscopic structure of EOMs and obtain the more accurate force of EOMs, they are too complicated and sophisticated for surgeons in clinical diagnosis and surgical operation [6]. Therefore, this study aims to propose a direct phys.scichina.com link.springer.com 984 Gao Z P, et al. Sci China-Phys Mech Astron and simple method to evaluate the active force of EOMs by gathering the existing anatomical and experimental documents excluding the above invasive techniques. All of the coordinates in the primary position [3] and the cross-section areas [6] of every EOM have been proposed; the credible parameter of the stiffness of the constrained tissues surrounding the eyeball has been extensively used [1,5,12]; and the general empirical equation of the passive tensile test [13] of EOMs also has been proposed [14]. In this study, these materials will be used with the traditional model to evaluate the active force of EOMs. 2 Method Eye movements are controlled by EOMs, four rectus muscles (lateral rectus (LR), medial rectus (MR), superior rectus (SR) and inferior rectus (IR) muscle) and the two oblique muscles (superior oblique (SO) and inferior oblique (IO)). All of the six muscles are hosted within the orbit to which they are connected on one side, which they inserted onto the globe on the other. In the primary position (looking straight ahead), the LR and MR muscle makes the globe rotate towards the temporal and nasal direction, respectively. The SR and SO muscle’s primary function is elevation and intorsion, respectively; and the IR and IO muscles function contrary to the above two [6]. The LR and MR muscles play an important role as an agonist-antagonist pair of muscles when eye moves in the horizontal plane. In this paper, the rotation of eye from the nasal to the temporal side in the horizontal plane (Figure 1(a)) is simulated by the traditional model, in which the EOMs are treated as elastic strands [3,7], the eyeball is represented by a center-fixed rigid sphere [6,7], and the restrictive function of the other tissues around the eyeball is treated as a moment [7]. Figure 1(a) shows the projection in the horizontal plane of a point in the globe, in which the OX axis is the line of sight, OA is the projective vector, and after rotation an angle θ around the global center to obtain the vector OA'. Ac- May (2014) Vol. 57 No. 5 cording to the geometric, the relationship between OA and OA' is x x 2 y 2 cos , 2 2 y x y sin , z z, (1) where, tan 1 ( y / x). Euler’s theorem points out any two orientations of a rigid body are related by a single rotation, and Listing’s law holds all of these equivalent shafts of eye movement lie in the same plane [15]. In this study, the angle is the equivalent angle, OZ is the equivalent shaft and the plane of YOZ is the Listing plane. In geometric (Figure 1(b)), the relationship among the insertion C(xc, yc, zc) and the origin D(xd, yd, zd) of an EOM as well as the tangency T(xt, yt, zt) between this EOM and the eyeball is x t2 yt2 zt2 R 2 , xt xd yt yd zt zd R 2 , yd zc zd yc xt zd xc xd zc yt xd yc yd xc zt 0, (2) where, R is the radius of eyeball. Thus, the coordinates of the insertion, origin and tangency of every EOM can be obtained by eqs. (1) and (2), and then the initial (L0) and new (L) length as well as the variation (L) between them of every EOM can be calculated by the coordinates of the above three points. When eye moves, theoretically, the contractive EOM is agonist while the elongate EOM is antagonist. For the antagonist muscles, the relationship between the force T and the variation of the muscle length ∆L can be represented by a general exponential function [6]. Quaia et al. [14] proposed an empirical equation to describe this relationship, Figure 1 (Color online) (a) Eye moves in the horizontal plane; (b) (view from above) relationship among the insertion, origin and tangency of the LR muscle. Note that the Z axis points to the reader (this drawing is created by modifying Figure 2A of ref. [3]). Gao Z P, et al. Sci China-Phys Mech Astron T(L)=0.95(L)+0.74exp(L/2.91)+3.13, based on the test data in ref. [13], which was obtained by dragging the LR muscle of five deeply anesthetic patients. EOMs are treated as the same material in this paper, and then the antagonist (passive) force of each EOM is represented by the above equation multiplying a coefficient k, that is, T L k 0.95 L 0.74 exp L 2.91 3.13 , (3) where, k=Ai/A1, i=1, 2, 3, …, 6 denotes the LR, MR, SR, IR, SO and IO muscles, respectively; A denotes the cross- section area of EOMs. The restraint stiffness of the other tissues around eyeball Kt is 0.1×radius mN/° [5], but the unit of force is gf in the traditional literature [1,12] about the force of EOMs. Because 1 gf≈9.8 mN, Kt≈0.12 gf/° in this paper. When eyeball rotates an angle θ around the equivalent axis OZ from the initial position to a new position, the moment of the restrictive tissues is Mt=KtR2 (nxi+nyj+nzk), in which nx=ny=0. Thus, the static equilibrium equation can be represented 6 2 mix K t R nx 0, i 1 6 2 miy K t R n y 0, i 1 6 2 miz K t R nz 0. i 1 (4) Substituting eq. (3) into eq. (4), the agonist (active) force can be obtained. When eye rotates every angle in the horizontal plane from 0° to 30° [16], the force of EOMs is simulated by using the MATLAB software according to this method, and all of the parameters used in this method are shown in Table 1. 3 Result and discussion Table 2 shows the detailed numerical simulation results including the angles of eye rotation and the related force and length variation of EOMs. It is shown that the increments of the force and length variation of the LR and MR muscles with eye movement are obviously much larger than the other EOMs. This result also demonstrates that the LR and MR muscles play an important role in controlling eye movement in the horizontal plane. The relationship between the length variation L of the LR and MR muscles and the eye rotation angles is showed in Figure 2. The agonistTable 1 May (2014) Vol. 57 No. 5 985 antagonist function of LR-MR muscles can be clearly seen in Figure 2, that is, the contractive amount of the LR muscle nearly equals the elongate amount of the MR muscle when eye rotates every angle from the nasal to the temporal side in the horizontal plane. In order to verify the feasibility of this method, the simulation result of the LR muscle was compared with the previous experimental data [1], which give the active force of LR muscle and the stiffness of the tissues surrounding the eyeball of twenty-nine normal human subjects when eye rotated in the horizontal plane in the range of ±50°. The data of segment (Figure 3(c)) of 0°–30° were selected for comparison with the simulation results and the comparison is showed in Figure 3(a). As shown in Figure 3(a), the simulation data are very close to the experimental result when eye rotates in the range of 10°–30°, but the error of the range of 0°–10° is large. The reason for this phenomenon is as follows. When eye rotates an angle from the nasal to the temporal side in the horizontal plane, the LR muscle actively contracts and the MR muscle is passively elongated at the same time, and thus the agonist force of the LR muscle must be larger than the antagonist force of the MR muscle. Table 2, however, shows the simulation force of the LR muscle is less than the MR muscle in the range of 0°–10°. The simulation results of LR muscle in the range of 0°–10° are wrong and must be corrected. When eye rotated in the horizontal plane from the nasal to the temporal side, the difference (∆F=FL-agFM-antag) between the active force of the LR muscle and the passive force of the MR muscle was measured nearly equal to the load of the temporal tissues intact eye (Kt×) (For detailed result see Figure 10 of the ref. [1]). Thus, the simulation data of the range of 0°–10° were corrected by the following equation: FLR FMR K t . (5) Figure 3(b) shows the corrected result. As shown in Figure 3(b), the error (gray region in Figure 3(b)) between the corrected result and the experimental data is much less than the previous one (gray region in Figure 3(a)). The reason for the error remaining between the corrected simulation result and the experimental data is that the coordinate parameters of ocular motion plant used in this study are from ref. [3], but the experimental data are given from ref. [1]. Although both of the subjects in the previous two studies are human, the individual differences of the same species cannot be ignored. The parameters used in this study. Radius of eyeball R is 12.00 mm [3]; stiffness of constrained tissues Kt is 0.12 gf/° [5] LR SR SO MR IR IO Origin [3] 34.00, 13.00, 0.60 31.78, 16.00, 3.60 8.24, 15.27, 12.25 30.00, 17.00, 0.60 31.70, 16.00, 2.40 11.34, 11.10, 15.46 Insertion [3] 6.50, 10.08, 0.00 7.33, 0.00, 10.48 8.42, 9.65, 0.00 8.02, 0.00, 10.24 7.18, 8.70, 0.00 4.41, 2.90, 11.05 16.73 11.34 19.34 17.39 15.85 19.83 C-S area (mm2) [6] 986 Gao Z P, et al. Table 2 (°) Sci China-Phys Mech Astron May (2014) Vol. 57 No. 5 The numerical simulation results in this study L (mm)(“” is contraction, “+” is elongate) Force (gf) LR MR SR IR SO IO LR MR SR IR SO IO 0 2.56 4.02 3.22 3.66 4.47 4.44 0.00 0.00 0.00 0.00 0.00 0.00 1 1.45 4.40 3.40 3.75 4.53 4.47 0.21 0.30 0.07 0.07 0.04 0.02 2 0.35 4.78 3.57 3.83 4.58 4.51 0.41 0.59 0.13 0.14 0.08 0.05 3 0.74 5.16 3.74 3.92 4.64 4.54 0.62 0.87 0.20 0.22 0.12 0.08 4 1.84 5.54 3.91 4.00 4.69 4.57 0.83 1.16 0.26 0.28 0.15 0.11 5 2.93 5.93 4.06 4.07 4.74 4.61 1.04 1.43 0.33 0.35 0.19 0.14 6 4.02 6.32 4.22 4.15 4.79 4.64 1.25 1.71 0.38 0.41 0.22 0.18 7 5.10 6.72 4.37 4.22 4.83 4.68 1.46 1.97 0.44 0.47 0.25 0.23 8 6.17 7.12 4.52 4.29 4.88 4.72 1.67 2.23 0.49 0.53 0.28 0.27 9 7.23 7.54 4.65 4.35 4.93 4.76 1.88 2.50 0.54 0.59 0.31 0.32 10 8.28 7.96 4.79 4.41 4.96 4.80 2.09 2.76 0.59 0.64 0.34 0.37 11 9.31 8.40 4.92 4.47 4.99 4.84 2.30 3.01 0.64 0.69 0.37 0.43 12 10.3 8.84 5.04 4.53 5.03 4.88 2.51 3.27 0.68 0.73 0.39 0.49 13 11.3 9.31 5.16 4.58 5.06 4.92 2.72 3.52 0.72 0.78 0.42 0.55 14 12.3 9.79 5.28 4.63 5.10 4.96 2.92 3.77 0.76 0.82 0.44 0.61 15 13.2 10.2 5.39 4.67 5.13 5.00 3.13 4.02 0.79 0.85 0.46 0.68 16 14.2 10.8 5.49 4.72 5.15 5.04 3.34 4.26 0.82 0.89 0.48 0.75 17 15.1 11.3 5.59 4.75 5.18 5.08 3.55 4.51 0.85 0.92 0.50 0.82 18 16.1 11.8 5.68 4.79 5.21 5.13 3.76 4.75 0.88 0.95 0.51 0.89 19 16.9 12.4 5.77 4.82 5.22 5.17 3.97 5.00 0.91 0.97 0.53 0.97 20 17.7 13.1 5.85 4.84 5.24 5.21 4.18 5.24 0.92 0.99 0.54 1.05 21 18.5 13.7 5.92 4.87 5.26 5.26 4.39 5.48 0.94 1.01 0.55 1.13 22 19.3 14.4 5.99 4.89 5.27 5.30 4.60 5.72 0.96 1.03 0.56 1.22 23 20.1 15.1 6.05 4.91 5.29 5.34 4.81 5.96 0.97 1.04 0.57 1.31 24 20.8 15.8 6.11 4.92 5.30 5.38 5.02 6.20 0.98 1.05 0.58 1.39 25 21.4 16.6 6.16 4.93 5.31 5.42 5.23 6.43 0.98 1.06 0.58 1.48 26 22.1 17.4 6.21 4.93 5.31 5.46 5.44 6.67 0.99 1.06 0.59 1.57 27 22.6 18.3 6.24 4.94 5.31 5.51 5.64 6.91 0.99 1.07 0.59 1.67 28 23.1 19.2 6.27 4.93 5.32 5.54 5.85 7.14 0.98 1.06 0.59 1.76 29 23.5 20.2 6.29 4.93 5.32 5.58 6.06 7.38 0.98 1.06 0.59 1.86 30 23.9 21.3 6.30 4.91 5.31 5.62 6.27 7.61 0.97 1.05 0.59 1.96 fitted by the formula T(L)=a(L)b+c, and the result (R2=0.99, Figure 3(d)) was obtained T (L) 2.43(L)1.18 3.85. 4 Figure 2 Relationship between θ and ∆L of the LR and MR muscles. The relationship between the corrected simulation forces and the relevant contractive amounts of the LR muscle was (6) Summary Using the traditional eye movement model, we have introduced a simple numerical simulation method to evaluate the active force of human LR muscle. The situation that eye rotates every angle from 0° to 30° in the horizontal plane from the nasal to the temporal side has been simulated by using this method. The error between the simulation results and the previous experimental data [1] is large in the range of 0°–10°. Therefore, the simulation data in the range of 0°–10° are corrected by eq. (5), and the corrected simulation results are much closer to the experimental data [1]. Finally, Gao Z P, et al. Sci China-Phys Mech Astron May (2014) Vol. 57 No. 5 987 Figure 3 (Color online) (a) and (b) represent the comparison between the simulation result and the experimental data [1] of LR muscle and the comparison among the simulation result and the experimental data [1] as well as the corrected result of the LR muscle (the shadow region is the error of the range of 0°–10°, and the tint region is the corrected amount), respectively; (c) experimental data of the active force of the left LR muscle (Figure 8 of the ref. [1]), which was measured in the subject K.C., and the data of gray region were selected for comparison with the simulation results; (d) fitting result of the simulation force of the LR muscle. we propose a general empirical equation (eq. (6)) to represent the relationship between the active force and the contractive amount of the LR muscle by fitting the corresponding data points. 7 This work was supported by the National Natural Science Foundation of China (Grant No. 11032008). 10 1 2 3 4 5 6 Collins C C, Carlson M R, Scott A B, et al. Extraocular muscle forces in normal human subjects. Invest Ophth Vis Sci, 1981, 20(5): 652– 664 Robinson D A. A quantitative analysis of extraocular muscle cooperation and squint. Invest Ophth, 1975, 14(11): 801–825 Miller J M, Robinson D A. A model of the mechanics of binocular alignment. Comput Biomed Res, 1984, 17: 436–470 Miller J M, Demer J L, Rosenbaum A L. Effect of transposition surgery on rectus muscle paths by magnetic resonance imaging. Ophthalmology, 1993, 100: 475–487 Schutte S, van den Bedem S P W, van Keulen F, et al. A finite-element analysis model of orbital biomechanics. Vis Res, 2006, 46: 1724–1731 Pascolo P, Carniel R. From time series analysis to a biomechanical multibody model of the human eye. Chaos Sol Fract, 2009, 40: 966–974 8 9 11 12 13 14 15 16 Wei Q, Sueda S, Pai D K. Physically-based modeling and simulation of extraocular muscles. Prog Biophys Mol Bio, 2010, 103: 273–283 Hill A V. The heat of shortening and the dynamic constants of muscle. P Roy Soc, 1938, 126B: 136–195 Miller J M, Davision R C, Gamlin P D. Motor nucleus activity fails to predict extraocular muscle forces in ocular convergence. J Neurophys, 2011, 105: 2863–2873 Gamlin P D, Miller J M. Extraocular muscle motor units characterized by spike-triggered averaging in alert monkey. J Neurosci Meth, 2012, 204: 159–167 Feng C Y, Henning G W, Corrigan R D, et al. Analysis of spontaneous and nerve-evoked calcium transients in intact extraocular muscles in vitro. Exp Eye Res, 2012, 100: 73–85 Simonsz H J. Force-length recording of eye muscles during local anesthesia surgery in 32 strabismus patients. Strabismus, 1994, 2: 197–218 Scott A B. Extraocular muscle forces in strabismus. In: Bach R P, Collins C C, eds. The Control of Eye Movements. New York and London: Academic Press, 1971. 327–342 Quaia C, Ying H S, Nichols A M, et al. The viscoelastic properties of passive eye muscle in primates. I: Static forces and step responses. PLoS One, 2009, 4: e4850 Tweed D, Vilis T. Geometric relations of eye position and velocity vectors during saccades. Vis Res, 1990, 30: 111–127 Pascolo P, Carniel R, Grimaz S. Dynamical models of the human eye and strabismus. Chaos Sol Fract, 2009, 41: 2463–2470