Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
1. COMPUTER
ORGANIZATION
&OPERATING
SYSTEMS
2.SYLLABUS
COMPUTER ORGANIZATION AND OPERATING SYSTEMS
UNIT I
Basic structure of computers:
Computer types, functional unit, basic operational concepts, bus structures, software,
performance ,multiprocessors and multi computers, data representation, fixed point
representation, floating-point representation.
Register transfer language and micro operations: Register transfer language
,register transfer bus and memory transfers ,arithmetic micro operations ,logic micro
operations, shift micro operations, arithmetic logic shift unit, Instruction codes,
computer registers computer instructions-instruction cycle.
Memory-reference instructions, input-output and interrupt, stack organization,
instruction formats, addressing modes, data transfer and manipulation, program
control ,reduced instruction set computer.
UNIT II
Micro programmed control: control memory, address sequencing, micro program
examples, design of control unit ,hard weird control, micro programmed control
The memory system :basic concepts of semiconductor RAM memories, read-only
memories, cache memories performance considerations, virtual memories secondary
storage, introduction to RAID.
UNIT III
Input-output organization: peripheral devices ,input-output interface, asynchronous
data transfer modes, priority interrupt, direct memory access, input- output
processor(iop),serial communication, introduction to peripheral components
,interconnect(pci)bus, introduction to standard serial communication protocols like
RS232,USB,IEEE1394.
UNIT IV:
Computer System and Operating System Overview: Overview of computer operating
systems functions , protection and security, distributed systems special purpose
systems, operating systems structures-operating system services and systems calls,
system programs, operating systems generation.
Memory Management : Swapping, contiguous memory allocation, paging, structure
of the page table , segmentation, virtual memory, demand paging, page-Replacement
algorithms, allocation of frames, thrashing case studies UNIX, Linux, Windows.
Principles of deadlock : system model, deadlock characterization, deadlock
prevention, detection and avoidance, recovery form deadlock.
UNIT V:
File system Interface: the concept of a file, Access Methods, Directory structure, File
system mounting, file sharing, protection.
File System implementation: File system structure, file system implementation,
directory implementation, directory implementation, allocation methods, free-space
management.
TEXT BOOKS
1. computer organization-Carl Hamacher, Zvonks Vranesic,safeazaky,5th
edition,McGrawHill.
2. computer systems architecture-M.MorisMano,3rd Edition,pearson.
3. Operating System Concepts- Abraham Silberchatz, Peter B. Galvin, Greg Gagne 7th
Edition, John Wiley.
REFERENCE BOOKS
1.computer organization and architecture-William Stallings 6th Edition, Pearson
2.structured computer organization-Andrew s.tanenbaum,4th edition PHI
3.fundamentals of computer organization and design-Sivaraama Dandamudi Springer
int.Edition.
4.operating systems-internals and design principles.stallings,6th edition-2009,pearson
education.
3.Vision of the Department
To impart quality technical education in Electronics and Communication
Engineering
emphasizing
analysis,
design/synthesis
and
evaluation
of
hardware/embedded software using various Electronic Design Automation
(EDA) tools with accent on creativity, innovation and research thereby
producing competent engineers who can meet global challenges with societal
commitment.
4.Mission of the Department
i.
To impart quality education in fundamentals of
basic sciences, mathematics,
electronics and communication engineering through innovative teaching-learning
processes.
ii. To facilitate Graduates define, design, and solve engineering problems in the field
of Electronics and Communication Engineering using various Electronic Design
Automation (EDA) tools.
iii. To encourage research culture among faculty and students thereby facilitating
them to be creative and innovative through constant interaction with R & D
organizations and Industry.
iv. To inculcate teamwork, imbibe leadership qualities, professional ethics and social
responsibilities in students and faculty.
5.Program Educational Objectives and Program outcomes of B.
Tech (ECE) Program
Program Educational Objectives of B. Tech (ECE) Program :
I.
To
prepare
students
with
excellent
comprehension
of
basic
sciences,
mathematics and engineering subjects facilitating them to gain employment or
pursue postgraduate studies with an appreciation for lifelong learning.
II.
To train students with problem solving capabilities such as analysis and design
with adequate practical skills wherein they demonstrate creativity and
innovation that would enable them to develop state of the art equipment and
technologies of multidisciplinary nature for societal development.
III.
To inculcate positive attitude, professional ethics, effective communication and
interpersonal skills which would facilitate them to succeed in the chosen
profession
exhibiting
creativity
and
innovation
through
development both as team member and as well as leader.
research
and
Program Outcomes of B.Tech ECE Program:
1. An ability to apply knowledge of Mathematics, Science, and Engineering to solve
complex engineering problems of Electronics and Communication Engineering
systems.
2. An ability to model, simulate and design Electronics and Communication
Engineering systems, conduct experiments, as well as analyze and interpret
data and prepare a report with conclusions.
3. An ability to design an Electronics and Communication Engineering system,
component, or process to meet desired needs within the realistic constraints
such as economic, environmental, social, political, ethical, health and safety,
manufacturability and sustainability.
4. An ability to function on multidisciplinary teams involving interpersonal skills.
5. An
ability
to
identify,
formulate
and
solve
engineering
problems
of
multidisciplinary nature.
6. An understanding of professional and ethical responsibilities involved in the
practice of Electronics and Communication Engineering profession.
7. An ability to communicate effectively with a range of audience on complex
engineering problems of multidisciplinary nature both in oral and written form.
8. The broad education necessary to understand the impact of engineering
solutions in a global, economic, environmental and societal context.
9. A recognition of the need for, and an ability to engage in life-long learning and
acquire the capability for the same.
10. A knowledge of contemporary issues involved in the practice of Electronics and
Communication Engineering profession
11. An ability to use the techniques, skills and modern engineering tools necessary
for engineering practice.
12. An ability to use modern Electronic Design Automation (EDA) tools, software
and electronic equipment to analyze, synthesize and evaluate Electronics and
Communication Engineering systems for multidisciplinary tasks.
13. Apply engineering and project management principles to one's own work and
also to manage projects of multidisciplinary nature
6. COURSE OBJECTIVES AND OUTCOMES :
Course objectives:
Should be able to explain the basic structure, operation and data
representation of a digital computer
Should be able to perform arithmetic operations on fixed point and
floating point numbers using standard algorithms.
Should be able to perform micro operations on registers.
Should be able design control unit using micro programming by properly
selecting the type of memory for the given purpose.
Should be able to differentiate ways of communicating with IO devices
and standard IO interfaces.
Should be able to differentiate cache memory and virtual memory with
the understanding of the hierarchical memory system.
Should be able to demonstrate the knowledge of functions of operating
system memory management scheduling, file system and interface,
distributed systems, security and Dead locks.
Should be able to implement a significant portion of an operating system.
Course Outcomes:
At the end of course, student will
Explain the basic structure, operation and data representation of a
digital computer.
Perform arithmetic operations on fixed point and floating point numbers
using standard algorithms.
Design control unit using micro programming (using micro operations)
and proper type of memory.
Differentiate ways of communicating with IO devices and standard IO
interfaces.
Differentiate cache memory and virtual memory with the understanding
of the hierarchical memory system.
Demonstrate the knowledge of functions of operating system memory
management scheduling, file system and interface, distributed systems,
security and Dead locks.
Implement a significant portion of an operating system.
7. Brief Notes On The Importance Of The Course And How It
Fits Into The Curriculum
Computer organization and Operating systems (COOS)
course
explains fundamental knowledge needed for the design of digital
systems, logical operation of the most common standard digital
components, register transfer language and shows how it is used
to
express
micro
operations,
algorithms
for
arithmetical
operations, memory organization Input/output organization and
processor organization and provide a set of functions needed and
used by most application programs on a computer, and the linkages
needed to control and synchronize computer hardware. On the first
computers, with no operating system, every program needed the full
hardware specification to run correctly and perform standard tasks, and
its own drivers for peripheral devices like printers and punched paper
card readers. The growing complexity of hardware and application
programs eventually made operating systems a necessity.
8. Prerequisites :
.
Students should have little basics of computer components,
microprocessor interfacing lab and
operating system that would be able to use computer.
9.Instructional Learning Outcomes
UNIT-1:
Students will be able to
Identify Basic components of the computer and its functionality.
Analyze the Basic operations between the memory and processor.
Analyze Data transfer between the components.
Compute binary arithmetic operations.
Recognize Register transfer language notations for data transfer (basic
assembly language).
Distinguish Instruction formats and different addressing modes.
Write Data transfer and manipulation notations .
Describe Instruction cycle and arithmetic and logical shift operations.
UNIT-2:
Students will be able to
Outline on Control memory operations.
Analyze Program execution sequence .
Compare hard wired and micro programmed designs
Summarize Basic concepts on memory and differences between those
memories.
Apply different Cache memory mapping techniques .
Recall Virtual memory concepts .
Identify Different secondary storage devices
UNIT-3:
At the end of this unit students will
Recall Basic concepts on different input and output devices .
Identify Types I/O interfaces .
Compare Different kinds of data transfers between the devices .
UNIT-4:
At the end of the unit student will
Know what is an operating system and the role it plays.
Use the design aspects of operating system.
Use the services provided by operating systems.
Exposure to some details of major OS concepts.
Learn difference between multiprogramming, multitasking,
multithreading, and multiprocessor.
Compare and Contrast kernel and user mode in an operating
system.
Appreciate the need for memory management in operating systems, and
the limits of fixed memory allocation schemes.
Learn fragmentation in dynamic memory allocation, and dynamic
allocation approaches.
Learn how program memory addresses relate to physical memory
addresses, memory management in base-limit machines, and swapping
Techniques.
An overview of virtual memory management, including paging and
segmentation.
Implement Page replacement Algorithms: FIFO, LRU and OPTIMAL
Use the different methods of Deadlock recovery.
Determine the deadlock by using Resource Allocation Graph.
Implement Banker‘s algorithm for Deadlock prevention and
Deadlock Avoidance.
UNIT-5:
At the end of the unit student will
Implement the File allocation techniques: sequential, Indexed and
Linked.
Know how to manage free-space in memory.
Learn the structure of Directory and Structure of Files.
Describe File sharing and File system mounting.
10.Course mapping with PEOs and POs
Mapping of Course to PEOs and Pos
Course
PEOS
POs
Computer
organization&
Operating
Systems
PEO1,PEO2
PO1,PO3,PO9,PO2,PO4,PO9,po10,PO13,
Mapping of Course outcomes to Program Outcomes
S.No.
Course Outcome
POs
1.
Explain the basic structure, operation and data
representation of a digital computer
PO1,po3
2.
Perform arithmetic operations on fixed point
PO9
and floating point numbers using standard
algorithms.
3.
Design control unit using micro programming
(using micro operations) and proper type of
memory
Po2,po1
4.
Differentiate ways of communicating with IO
devices and standard IO interfaces
Po4
5.
Differentiate cache memory and virtual memory
Po9
with the understanding of the hierarchical
memory system.
6.
Demonstrate the knowledge of functions of
operating system memory management
scheduling, file system and interface,
distributed systems, security and Dead locks
Po10
7.
Implement a significant portion of an operating
system
Po10,po13
13.MICROPLAN WITH METHODOLOGY BEING USED/
ADOPTED
Date
Topic Covered
No of Periods
Lecture
methodology
ECE-A(M.Raja Krishna Kumar)
1
23-06-2015
Computer Types, Generations, Functional
units
2
BB
2
3
25-06-2015
26-06-2015
Basic operational concepts, Bus structures
Softwares
1
1
BB
BB
4
27-06-2015
Tutorial Class
1
BB,
Learning
by doing
5
6
7
30-06-2015
02-07-2015
03-07-2015
Performance ,Multi processor &Computers
Fixed &floating point Representation
Number system
2
1
1
BB
BB
BB
04-07-2015
Tutorial Class
1
BB,
Learning
by doing
07-07-2015
09-07-2015
complements
Binary codes
2
1
BB
BB
1
BB
2
1
1
2
BB
BB
BB
BB
1
BB
1
BB
8
9
10
UNIT-1
SNO Unit No
11
10-07-2015
12
13
14
15
14-07-2015
16-07-2015
17-07-2015
21-07-2015
16
23-07-2015
17
24-07-2015
Register transfer language, register
transfer bus ,memory transfers
Arithmetic, logical, shift micro operations
Computer registers ,instruction codes
Instructions &instruction cycles
Memory, i/o references, interrupts
Stack organization, instruction formats,
addressing modes
Data transfer and manipulation
Tutorial Class
1
BB,
Learning
by doing
Program control ,RISC
Micro programming, program execution
sequencing
2
BB
1
BB
31-07-2015
Hard wired and micro programmed designs
1
BB
22
01-08-2015
Tutorial Class
1
BB,
Learning
by doing
23
04-08-2015
Algorithms for fixed &Floating point
addition, subtraction
2
BB
1
1
2
BB
BB
BB
1
BB
1
2
1
1
BB
BB
BB
BB
1
BB,
Learning
by doing
2
BB
1
BB
1
BB
19
28-07-2015
20
30-07-2015
21
27
13-08-2015
28
29
30
31
14-08-2015
18-08-2015
20-08-2015
21-08-2015
Multiplication ,division
Floating point arithmetic operations
Decimal arithmetic unit & operations
Semiconductor RAM &ROM memories,
hierarchy
Cache memory
Virtual memories
Secondary storage devices
Raid levels
32
22-08-2015
Tutorial Class
33
25-08-2015
34
35
UNIT-3
24
25
26
UNIT-2
18
25-07-2015
06-08-2015
07-08-2015
11-08-2015
27-08-2015
28-08-2015
Peripheral devices, i/o interfaces,
asynchronous data transfer modes
Priority interrupt, DMA
I/O processor serial communication,
introduction to peripheral components
29-08-2015
Tutorial Class
1
BB,
Learning
by doing
37
01-09-2015
Introduction to standard serial protocols
like rs232,usb,IEEE1394
2
BB
38
03-09-2015
1
BB
39
04-09-2015
Computer System-Overview & Architecture
Introduction to OS, Operating System
Structure
1
BB
System Calls, OS Functions
Transition from user to kernel mode
Memory management, Swapping
Paging, Structure of Page Table
Free frames
2
1
1
2
1
BB
BB
BB
BB
BB
40
41
42
43
44
UNIT-4
36
08-09-2015
10-09-2015
11-09-2015
15-09-2015
18-09-2015
Tutorial Class
1
BB,
Learning
by doing
22-09-2015
24-09-2015
25-09-2015
Segmentation
Case study
Deadlocks, Deadlock Characteristics
2
1
1
BB
BB
BB
49
26-09-2015
Tutorial Class
1
BB,
Learning
by doing
50
51
29-09-2015
01-10-2015
Deadlocks avoidance, Detection
Deletion algorithm usage
2
1
BB
BB
52
03-10-2015
Tutorial Class
1
BB,
Learning
by doing
06-10-2015
08-10-2015
09-10-2015
09-10-2015
File system interface: concept, structure
File system interface: mounting, protection
File system implementation
File sharing
2
1
1
1
BB
BB
BB
BB
46
47
48
53
54
55
56
Unit-5
45
19-09-2015
Date
Topic Covered
Lecture
methodo
logy
SNO Unit No
No of
Periods
ECE-B(M.Raja Krishna Kumar)
1
BB
1
1
1
BB
BB
BB
BB,
Learning
by
Doing
BB
BB
BB
BB
BB,
Learning
by
Doing
22-06-2015
2
3
4
23-06-2015
25-06-2015
26-06-2015
Computer Types, Generations, Functional
units
Basic operational concepts, Bus structures
Softwares
Performance ,Multi processor &Computers
5
27-06-2015
Tutorial Class
1
29-06-2015
30-06-2015
02-07-2015
03-07-2015
Fixed &floating point Representation
Number system
complements
Binary codes
1
1
1
1
10
04-07-2015
Tutorial Class
1
11
06-07-2015
12
07-07-2015
6
7
8
9
UNIT-1
1
Register transfer language, register
transfer bus ,memory transfers
Arithmetic, logical, shift micro operations
1
BB
1
BB
13
14
15
09-07-2015
10-07-2015
13-07-2015
Computer registers ,instruction codes
Instructions &instruction cycles
Memory, i/o references, interrupts
Stack organization, instruction formats,
addressing modes
1
1
1
BB
BB
BB
16
14-07-2015
1
BB
17
18
19
16-07-2015
17-07-2015
20-07-2015
Data transfer and manipulation
Program Control
RISC
1
1
1
BB
20
21-07-2015
Micro programming, program execution
sequencing
1
BB
21
23-07-2015
1
BB
22
24-07-2015
1
BB
Hard wired and micro programmed designs
Algorithms for fixed &Floating point
addition, subtraction
BB
25-07-2015
Tutorial Class
1
24
25
26
27-07-2015
28-07-2015
30-07-2015
Multiplication ,division
Floating point arithmetic operations
Decimal arithmetic unit & operations
Semiconductor RAM &ROM memories,
hierarchy
1
1
1
1
BB
27
UNIT-2
23
BB,
Learning
by
Doing
BB
BB
BB
31-07-2015
01-08-2015
Tutorial Class
1
29
30
31
32
03-08-2015
04-08-2015
06-08-2015
07-08-2015
1
1
1
1
33
10-08-2015
Cache memory
Virtual memories
Secondary storage devices
Raid levels
Peripheral devices, i/o interfaces,
asynchronous data transfer modes
Priority interrupt, DMA
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
BB,
Learning
by
Doing
BB
34
35
UNIT-3
28
BB,
Learning
by
Doing
BB
BB
BB
BB
11-08-2015
13-08-2015
21-08-2015
Introduction to standard serial protocols
like rs232,usb,IEEE1394
Computer System-Overview & Architecture
Introduction to OS, Operating System
Structure
System Calls, OS Functions
22-08-2015
Tutorial Class
1
24-08-2015
Transition from user to kernel mode
1
14-08-2015
38
18-08-2015
39
20-08-2015
41
42
UNIT-4
36
40
I/O processor serial communication,
introduction to peripheral components
25-08-2015
27-08-2015
28-08-2015
Memory management, Swapping
Paging, Structure of Page Table
Free frames
1
1
1
46
29-08-2015
Tutorial Class
1
47
48
49
50
51
52
53
54
55
31-08-2015
01-09-2015
03-09-2015
04-09-2015
07-09-2015
08-09-2015
10-09-2015
11-09-2015
14-09-2015
Segmentation
Case study
Deadlocks, Deadlock Characteristics
Deadlocks avoidance, Detection
Deletion algorithm usage
File system interface: concept, structure
File system interface: mounting, protection
File system implementation
File sharing
1
1
1
1
1
1
1
1
1
Unit-5
43
44
45
BB
BB
BB
BB,
Learning
by
Doing
BB
BB
BB
BB
BB
BB
BB
BB
BB
ECE-C
SNO
Unit No
1.
UNIT-1
Date
Topic Covered
22/06/2015, Computer Types,
24/06/2015 Generations,
Functional units
No of
Periods
2
Lecture
methodology
BB
2.
25/06/2015
Basic operational
concepts, Bus
structures
1
BB
3.
26/6/2015
Soft wares
1
BB
4.
27/6/2015
Performance ,Multi
processor &Computers
1
BB
5.
29/06/2015
Fixed &floating point
Representation
1
BB
6.
1/7/2015
Number system
2
BB
7.
2/7/2015
complements
1
BB
8.
3/7/2015
Binary codes
1
BB
9
4/7/2015
Register transfer
language, register
transfer bus ,memory
transfers
1
BB
10
6/7/2015
Arithmetic, logical,
shift micro operations
1
BB
11
8/7/2015
Computer registers
,instruction codes
1
BB
12
9/7/2015
Instructions
&instruction cycles
1
BB
13
10/7/2015
Memory, i/o
references, interrupts
2
BB
14
11/70/2015, Stack organization,
13/7/2015
instruction formats,
addressing modes
2
BB
15
15/7/2015
Data transfer and
manipulation
1
BB
16
16/7/2015
Program control ,RISC
1
BB
17
17/7/2015
1
BB
18
20/7/2015,
22/7/2015,
23/7/2015,
24/7/2015.
Micro programming,
program execution
sequencing
Hard wired and micro
programmed designs
4
BB
BB
UNIT-2
19
25/7/2015,
27/7/2015.
20
29/7/2015,
30/7/2015.
31/7/2015,
1/8/2015.
3/8/2015,
5/8/2015.
6/8/2015
21
22
23
7/8/2015
24
25
8/8/2015,
10/8/2015,
12/8/2015.
13/8/2015,
14/8/2015.
26
27
17/8/2015,
19/8/2015.
Algorithms for fixed
&Floating point
addition, subtraction
Multiplication ,division
2
BB
2
BB
Floating point
arithmetic operations
Decimal arithmetic
unit & operations
REVISION
2
BB
2
BB
BB
Semiconductor RAM
&ROM memories,
hierarchy
Cache memory
1
BB
BB
3
BB
Virtual memories and
secondary storage
devices
Raid levels
2
BB
2
BB
UNIT-3
27
BB
20/8/2015,
21/8/2015.
Peripheral devices, i/o
interfaces,
2
BB
28
22/8/2015,
24/8/2015.
26/8/2015,
27/8/2015.
29
30
28/8/2015
asynchronous data
transfer modes
Priority interrupt,
DMA
I/O processor serial
communication,
introduction to
peripheral
components
Introduction to
standard serial
protocols like
rs232,usb,IEEE1394
2
BB
2
BB
1
BB
UNIT-4
31
32
33
BB
29/8/2015 Introduction to OS
Computer-system
31/8/2015 overview
Computer-system
2/9/2015 architecture
-
1
BB
1
BB
1
BB
BB
34
35
36
37
38
39
40
41
3/9/2015 Tutorial class
4/9/2015 Discussion hour
1
BB
1
BB
Operating
7/9/2015 structure
9/9/2015 System calls
1
BB
1
BB
1
BB
1
BB
1
BB
Discussion hour
1
BB
Memory management
1
BB
Swapping
1
BB
Paging
1
BB
Free frames
1
BB
Structure of page table
1
BB
Segmentation
1
BB
Case study
1
BB
Tutorial class
1
BB
system
10/9/2015 Os functions
Transition from user
11/9/2015 to kernel mode
12/9/2015 Tutorial class
14/9/2015
42
16/9/2015
43
18/9/2015
44
19/9/2015
45.
46.
47.
48.
49.
21/9/2015
24/9/2015
25/9/2015
26/9/2015
28/9/2015
50
30/9/2015
51
1/10/2015
52
53
54
55
56
57
Unit-5
58
59
60
61
62
63
64
Discussion hour
1
BB
Deadlocks
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
Deadlock
3/10/2015 characteristics
Deadlocks avoidance
5/10/2015
Deletion
algorithm
7/10/2015 usage
Tutorial class
8/10/2015
Discussion hour
9/10/2015
Deadlock detection
10/10/2015
File system interface:
12/10/2015 concept, structure
File system interface:
14/10/2015 mounting
protection
15/10/2015
File
system
16/10/2015 implementation
Tutorial class
17/10/2015
Discussion hour
19/10/2015
File sharing
23/10/2015
ECE-D
SNO
Unit No
9.
UNIT-1
Date
Topic Covered
No of
Periods
2
Lecture
methodology
BB
22-06-2015
Computer Types,
Generations,
Functional units
10.
23-06-2015
Basic operational
concepts, Bus
structures
1
BB
11.
24-06-2015
Soft wares
1
BB
12.
27-06-2015
Performance ,Multi
processor &Computers
1
BB
13.
29-06-2015
Fixed &floating point
Representation
1
BB
14.
29-06-2015
30-06-2015
Number system
2
BB
15.
1-07-2015
complements
1
BB
16.
4-07-2015
Binary codes
1
BB
9
06-07-2015
Register transfer
language, register
transfer bus ,memory
transfers
1
BB
10
06-07-2015
07-07-2015
Arithmetic, logical,
shift micro operations
2
BB
11
08-07-2015
Computer registers
,instruction codes
1
BB
12
11-07-2015
Instructions
&instruction cycles
1
BB
13
13-07-2015
Memory, i/o
references, interrupts
2
BB
14
14-07-2015
15-07-2015
Stack organization,
instruction formats,
addressing modes
2
BB
15
20-07-2015
Data transfer and
manipulation
1
BB
16
21-07-2015
Program control ,RISC
1
BB
17
21-07-2015
1
BB
18
22-07-2015
25-07-2015
25-07-2015
27-07-2015
Micro programming,
program execution
sequencing
Hard wired and micro
programmed designs
4
BB
Algorithms for fixed
&Floating point
addition, subtraction
Multiplication ,division
2
BB
2
BB
Floating point
arithmetic operations
Decimal arithmetic
unit & operations
REVISION
2
BB
2
BB
Semiconductor RAM
&ROM memories,
hierarchy
Cache memory
1
BB
3
BB
UNIT-2
19
28-07-2015
29-07-2015
20
1-08-2015
3-08-2015
3-08-2015
4-08-2015
5-08-2015
8-8-2015
10-8-2015
21
22
23
11-08-2015
24
25
12-08-2015
17-08-2015
2
26
18-08-2015
19-08-2015
27
22-08-2015
24-08-2015
Virtual memories and
secondary storage
devices
Raid levels
2
BB
2
BB
UNIT-3
BB
27
24-08-2015
25-08-2015
28
26-08-2015
29-08-2015
31-08-2015
1-09-2015
29
30
2-09-2015
Peripheral devices, i/o
interfaces,
asynchronous data
transfer modes
Priority interrupt, DMA
2
BB
2
BB
I/O processor serial
communication,
introduction to
peripheral components
Introduction to
standard serial
protocols like
rs232,usb,IEEE1394
2
BB
1
BB
UNIT-4
31
32
33
7-09-2015
Introduction to OS
Computer-system
7-09-2015 overview
Computer-system
7-09-2015 architecture
-
1
BB
1
BB
1
BB
BB
34
35
36
37
38
39
40
8-09-2015 Tutorial class
9-09-2015 Discussion hour
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
Discussion hour
1
BB
Memory management
1
BB
Swapping
1
BB
Paging
1
BB
Operating
12-09-2015 structure
14-09-2015 System calls
system
14-09-2015 Os functions
Transition from user to
15-09-2015 kernel mode
16-09-2015 Tutorial class
41
19-09-2015
42
21-09-2015
43
21-09-2015
44
22-09-2015
45.
46.
53
54
55
56
57
64
Segmentation
1
BB
Case study
1
BB
Tutorial class
1
BB
Discussion hour
1
BB
Deadlocks
1
BB
Deadlock
3-10-2015 characteristics
Deadlocks avoidance
5-10-2015
Deletion
algorithm
5-10-2015 usage
Tutorial class
6-10-2015
Discussion hour
7-10-2015
Deadlock detection
10-10-2015
File system interface:
12-10-2015 concept, structure
File system interface:
12-10-2015 mounting
protection
14-10-2015
File
system
17-10-2015 implementation
Tutorial class
19-10-2015
Discussion hour
20-10-2015
File sharing
24-10-2015
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1
BB
1-10-2015
52
63
BB
30-09-2015
51
62
1
29-09-2015
50
61
Structure of page table
28-09-2015
49.
60
BB
28-09-2015
48.
59
1
26-09-2015
47.
58
Free frames
26-09-2015
Unit-5
14.DETAILED NOTES
Unit I
Basic Structure of Computers
Computer Architecture in general covers three aspects of computer design
namely: Computer Hardware, Instruction set Architecture and Computer
Organization.
Computer hardware consists of electronic circuits, displays, magnetic and
optical storage media and communication facilities.
Instruction set Architecture is programmer visible machine interface such as
instruction set, registers, memory organization and exception handling. Two
main approaches are mainly CISC (Complex Instruction Set Computer) and
RISC (Reduced Instruction Set Computer)
Computer Organization includes the high level aspects of a design, such as
memory system, the bus structure and the design of the internal CPU.
Computer Types
Computer is a fast electronic calculating machine which accepts digital input,
processes it according to the internally stored instructions (Programs) and
produces the result on the output device. The internal operation of the
computer can be as depicted in the figure below:
Figure 1: Fetch, Decode and Execute steps in a Computer System
The computers can be classified into various categories as given below:
•
Micro Computer
•
Laptop Computer
•
Work Station
•
Super Computer
•
Main Frame
•
Hand Held
•
Multi core
Micro Computer: A personal computer; designed to meet the computer needs
of an individual. Provides access to a wide variety of computing applications,
such as word processing, photo editing, e-mail, and internet.
Laptop Computer: A portable, compact computer that can run on power
supply or a battery unit. All components are integrated as one compact unit. It
is generally more expensive than a comparable desktop. It is also called a
Notebook.
Work Station: Powerful desktop computer designed for specialized tasks.
Generally used for tasks that requires a lot of processing speed. Can also be an
ordinary personal computer attached to a LAN (local area network).
Super Computer: A computer that is considered to be fastest in the world.
Used to execute tasks that would take lot of time for other computers. For Ex:
Modeling
weather
systems,
genome
sequence,
etc
(Refer
site:
http://www.top500.org/)
Main Frame: Large expensive computer capable of simultaneously processing
data for hundreds or thousands of users. Used to store, manage, and process
large amounts of data that need to be reliable, secure, and centralized.
Hand Held: It is also called a PDA (Personal Digital Assistant). A computer that
fits into a pocket, runs on batteries, and is used while holding the unit in your
hand. Typically used as an appointment book, address book, calculator and
notepad.
Multi Core: Have Multiple Cores – parallel computing platforms. Many Cores
or computing elements in a single chip. Typical Examples: Sony Play station,
Core2Duo,i3,i7etc
Functional Unit
A computer in its simplest form comprises five functional units namely input
unit, output unit memory unit, arithmetic & logic unit and control unit. Figure
2 depicts the functional units of a computer system.
Figure 2: Basic functional units of a computer
Let us discuss about each of them in brief:
1. Input Unit: Computer accepts encoded information through input
unit. The standard input device is a keyboard. Whenever a key is
pressed, keyboard controller sends the code to CPU/Memory.
Examples include Mouse, Joystick, Tracker ball, Light pen, Digitizer,
Scanner etc.
2. Memory Unit: Memory unit stores the program instructions
(Code), data and results of computations etc. Memory unit is
classified as:
•
Primary /Main Memory
•
•
Secondary
Memory/Auxiliary
Primary memory is a semiconductor memory that provides access at
high speed. Run time program instructions and operands are stored in
the main memory. Main memory is classified again as ROM and RAM.
ROM holds system programs and firmware routines such as BIOS, POST,
I/O Drivers that are essential to manage the hardware of a computer.
RAM is termed as Read/Write memory or user memory that holds run
time program instruction and data. While primary storage is essential, it
is volatile in nature and expensive. Additional requirement of memory
could be supplied as auxiliary memory at cheaper cost. Secondary
memories are non volatile in nature.
3. Arithmetic and logic unit: ALU consist of necessary logic circuits like
adder, comparator etc., to perform operations of addition, multiplication,
comparison of two numbers etc.
4. Output Unit: Computer after computation returns the computed results,
error messages, etc. via output unit. The standard output device is a
video monitor, LCD/TFT monitor. Other output devices are printers,
plotters etc.
5. Control Unit: Control unit co-ordinates activities of all units by issuing
control signals. Control signals issued by control unit govern the data
transfers and then appropriate operations take place. Control unit
interprets or decides the operation/action to be performed.
The operations of a computer can be summarized as follows:
1. A set of instructions called a program reside in the main memory of
computer.
2. The CPU fetches those instructions sequentially one-by-one from the
main memory, decodes them and performs the specified operation on
associated data operands in ALU.
3. Processed data and results will be displayed on an output unit.
4. All activities pertaining to processing and data movement inside the
computer machine are governed by control unit.
Basic Operational Concepts
An Instruction consists of two parts, an Operation code and operand/s as
shown below:
OPCODE OPERAND/s
Let us see a typical instruction
ADD LOCA, R0
This instruction is an addition operation. The following are the steps to
execute the instruction:
Step 1: Fetch the instruction from main memory into the processor
Step 2: Fetch the operand at location LOCA from main memory into the
processor
Step 3: Add the memory operand (i.e. fetched contents of LOCA) to the
contents of register R0 Step 4: Store the result (sum) in R0.
The same instruction can be realized using two instructions as
Load LOCA, R1
Add R1, R0
The steps to execute the instructions can be enumerated as below:
Step 1: Fetch the instruction from main memory into the processor
Step 2: Fetch the operand at location LOCA from main memory into
the processor Register R1
Step 3: Add the content of Register R1 and the contents of register R0
Step 4: Store the result (sum) in R0.
Figure 3 below shows how the memory and the processor are connected. As
shown in the diagram, in addition to the ALU and the control circuitry, the
processor contains a number of registers used for several different purposes.
The instruction register holds the instruction that is currently being executed.
The program counter keeps track of the execution of the program. It contains
the memory address of the next instruction to be fetched and executed. There
are n general purpose registers R0 to Rn-1 which can be used by the
programmers during writing programs.
Figure 3: Connections between the processor and the memory
The interaction between the processor and the memory and the direction of
flow of information is as shown in the diagram below:
Figure 4: Interaction between the memory and the ALU
BUS STRUCTURES
Group of lines that serve as connecting path for several devices is called a bus
(one bit per line). Individual parts must communicate over a communication
line or path for exchanging data, address and control information as shown in
the diagram below. Printer example – processor to printer. A common approach
is to use the concept of buffer registers to hold the content during the transfer.
Figure 5: Single bus structure
SOFTWARE
If a user wants to enter and run an application program, he/she needs a
System Software. System Software is a collection of programs that are
executed as needed to perform functions such as:
• Receiving and interpreting user commands
Entering and editing application programs and storing then as files in
secondary storage devices
• Running standard application programs such as word processors,
spread sheets, games etc…
Operating system - is key system software component which helps the user to
exploit the below underlying hardware with the programs.
USER PROGRAM and OS ROUTINE INTERACTION
Let‘s assume computer with 1 processor, 1 disk and 1 printer and application
program is in machine code on disk. The various tasks are performed in a
coordinated fashion, which is called multitasking. t0, t1 …t5 are the instances
of time and the interaction during various instances as given below:
t0: the OS loads the program from the disk
to memory t1: program executes
t2: program accesses disk
t3: program executes
some more t4: program
accesses printer
t5: program terminates
Figure 6 :User program and OS routine sharing of the processor
PERFORMANCE
The total time required to execute a program is the most important measure of
performance for a computer. (t0-t5 of earlier example). Compiler, instruction
set and hardware architecture, program all have impact on performance.
Basic Performance Equation: The basic performance equation is given by
T = (N * S) / R
where T=execution time, N=number of instructions, S=average cycles per
instruction, R=clock rate in cycles per second
CACHING
Commonly used data are copied to on-processor memory (cache) to reduce
access time. Small memories can be made with higher speed than large
ones. In a computer, we need both.
Figure 7: The processor cache
PIPELINING and SUPERSCALR OPERATION
Pipelining: Like a production line, instruction execution overlapped so
greater parallelism is achieved.
Superscalar operation: Execute several instructions simultaneously using
multiple ALU‘s.
CISC vs RISC
Reduced instruction set computer
– Large N, small S
Complex instruction set computer
– Small N, large S
COMPILER
Translates high level language such as C, C++ and Java to machine
instructions. Aims to reduce N×S
PERFORMANCE MEASUREMENT
Benchmark refers to standard task used to measure how well a processor
operates. To evaluate the performance of Computers, a non-profit organization
known as SPEC-System Performance Evaluation Corporation employs agreedupon application programs of real world for benchmarks. Accordingly, it gives
performance measure for a computer as the time required to execute a given
benchmark program. The SPEC rating is computed as follows
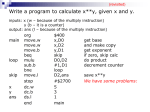
Register Transfer and Micro operations
Register Transfer Language
•
•
•
•
•
•
•
•
•
•
•
Digital systems are composed of modules that are constructed
from digital components, such as registers, decoders, arithmetic
elements, and control logic
The modules are interconnected with common data and control
paths to form a digital computer system
The operations executed on data stored in registers are called
micro operations
A micro operation is an elementary operation performed on the
information stored in one or more registers
Examples are shift, count, clear, and load
Some of the digital components from before are registers
that implement micro operations
The internal hardware organization of a digital computer is
best defined by specifying
o The set of registers it contains and their functions
o The sequence of micro operations performed on the binary
information stored
o The control that initiates the sequence of micro operations
Use symbols, rather than words, to specify the sequence of micro
operations
The symbolic notation used is called a register transfer language
A programming language is a procedure for writing symbols to
specify a given computational process
Define symbols for various types of micro operations and
describe associated hardware that can implement the micro
operations
Register Transfer
3. Designate computer registers by capital letters to denote its
function
4. The register that holds an address for the memory unit is called
MAR
5. The program counter register is called PC
6. IR is the instruction register and R1 is a processor register
7. The individual flip-flops in an n-bit register are numbered in
sequence from 0 to n-1
8. Refer to Figure 4.1 for the different representations of a register
•
Designate information transfer from one register to
another by R2 ← R1
•
This statement implies that the hardware is available
o The outputs of the source must have a path to the inputs of
the destination o The destination register has a parallel load
capability
• If the transfer is to occur only under a predetermined control
condition, designate it by
If (P = 1) then (R2 ← R1)
or,
P: R2 ← R1,
where P is a control function that can be either 0 or 1
•
Every statement written in register transfer notation implies the
presence of the required hardware construction
•
•
It is assumed that all transfers occur during a clock edge
transition
All microoperations written on a single line are to be executed at
the same time
T: R2 ← R1, R1 ← R2
Bus and Memory Transfers
•
•
•
•
•
•
•
•
•
Rather than connecting wires between all registers, a common
bus is used
A bus structure consists of a set of common lines, one for each
bit of a register
Control signals determine which register is selected by the
bus during each transfer
Multiplexers can be used to construct a common bus
Multiplexers select the source register whose binary information
is then placed on the bus
The select lines are connected to the selection inputs of the
multiplexers and choose the bits of one register
In general, a bys system will multiplex k registers of n bits
each to produce an n-line common bus
This requires n multiplexers – one for each bit
The size of each multiplexer must be k x 1
•
•
The number of select lines required is log k
To transfer information from the bus to a register, the bus lines
are connected to the inputs of all destination registers and the
corresponding load control line must be activated
• Rather than listing each step as
BUS ← C, R1 ← BUS,
use R1 ← C, since the bus is implied
•
•
•
•
•
•
•
•
Instead of using multiplexers, three-state gates can be used to
construct the bus system
A three-state gate is a digital circuit that exhibits three states
Two of the states are signals equivalent to logic 1 and 0
The third state is a high-impedance state – this behaves like an
open circuit, which means the output is disconnected and does not
have a logic significance
The three-state buffer gate has a normal input and a
control input which determines the output state
With control 1, the output equals the normal input
With control 0, the gate goes to a high-impedance state
This enables a large number of three-state gate outputs to be
connected with wires to form a common bus line without
endangering loading effects
•
•
•
•
Decoders are used to ensure that no more than one
control input is active at any given time
This circuit can replace the multiplexer in Figure 4.3
To construct a common bus for four registers of n bits
each using three-state buffers, we need n circuits with
four buffers in each
Only one decoder is necessary to select between the four
registers
•
•
Designate a memory word by the letter M
It is necessary to specify the address of M when
writing memory transfer operations
• Designate the address register by AR and the data register
by DR
• The read operation can be stated as:
Read: DR ← M[AR]
• The write operation can
be stated as:
Write: M[AR] ←
R1
Arithmetic Micro operations
•
There are four categories of the most common
microoperations:
o Register transfer: transfer binary information from one
register to another
o Arithmetic: perform arithmetic operations on
numeric data stored in registers
o Logic: perform bit manipulation operations on nonnumeric data stored in registers
o Shift: perform shift operations on data stored in registers
•
•
•
•
•
•
•
The basic arithmetic microoperations are addition,
subtraction, increment, decrement, and shift
Example of addition: R3 ← R1 +R2
Subtraction
is
most
often
implemented
through
complementation and addition
Example of subtraction: R3 ← R1 + R2 + 1 (strikethrough
denotes bar on top – 1‘s complement of R2)
Adding 1 to the 1‘s complement produces the 2‘s complement
Adding the contents of R1 to the 2‘s complement of R2
is equivalent to subtracting
Multiply and divide are not included as microoperations
•
•
•
•
•
•
•
•
•
A microoperation is one that can be executed by one clock
pulse
Multiply (divide) is implemented by a sequence of add and
shift microoperations (subtract and shift)
To implement the add microoperation with hardware, we
need the registers that hold the data and the digital
component that performs the addition
A full-adder adds two bits and a previous carry
A binary adder is a digital circuit that generates the
arithmetic sum of two binary numbers of any length
A binary added is constructed with full-adder circuits
connected in cascade
An n-bit binary adder requires n full-adders
The subtraction A-B can be carried out by the
following steps o Take the 1‘s complement
of B (invert each bit)
o Get the 2‘s complement by
adding 1 o Add the result to
A
The addition and subtraction operations can be combined into
one common circuit by including an XOR gate with each fulladder
•
The increment microoperation adds one to a number in a
register
• This can be implemented by using a binary counter – every
time the count enable is active, the count is incremented by
one
• If the increment is to be performed independent of a
particular register, then use half-adders connected in
cascade
An n-bit binary incremented requires n half-adders
•
•
•
•
Each of the arithmetic micro operations can be implemented in
one composite arithmetic circuit
The basic component is the parallel adder
Multiplexers are used to choose between the different
operations
The output of the binary adder is calculated from the following
sum:
D = A + Y + Cin
Logic Microoperations
•
•
•
Logic operations specify binary operations for strings of bits
stored in registers and treat each bit separately
Example: the XOR of R1 and R2 is symbolized by
P: R1 ← R1 ⊕ R2
Example: R1 = 1010 and R2 = 1100
1010 Content of R1
1100 Content of R2
0110 Content of R1 after P = 1
• Symbols used for logical
microoperations: o OR: ∨
o AND:
∧ o
XOR: ⊕
• The + sign has two different meanings: logical OR and
summation
• When + is in a microoperation, then summation
• When + is in a control function, then OR
• Example:
P + Q: R1 ← R2 + R3, R4 ← R5 ∨ R6
• There are 16 different logic operations that can be
performed with two binary variables
•
•
The hardware implementation of logic micro operations requires
that logic gates be inserted for each bit or pair of bits in the
registers
All 16 micro operations can be derived from using four logic gates
Logic micro operations can be used to change bit values, delete a
group of bits, or insert new bit values into a register
• The selective-set operation sets to 1 the bits in A where there are
corresponding 1‘s in B
1010 A before
1100 B (logic operand)
1110
A
after A ← A ∨ B
•
The selective-complement operation complements bits in A
where there are corresponding 1‘s in B
1010 A before
1100 B (logic operand)
0110
A
after A ← A ⊕ B
•
The selective-clear operation clears to 0 the bits in A only
where there are corresponding 1‘s in B
1010 A before
1100 B (logic operand)
0010 A after
A←A∧B
•
The mask operation is similar to the selective-clear operation,
except that the bits of A are cleared only where there are
corresponding 0‘s in B
1010 A before
1100 B (logic operand)
1000
A
after A ← A ∧ B
•
•
The insert operation inserts a new value into a group of bits
This is done by first masking the bits to be replaced and then
Oring them with the bits to be inserted
0110
1010 A before
0000
1111 B (mask)
0000 A after
1010 masking
0000
1010 A before
1001
0000 B (insert)
1001 A after
1010 insertion
•
The clear operation compares the bits in A and B and produces
an all 0‘s result if the two number are equal
1010 A
1010 B
0000 A ← A ⊕ B
Shift Micro operations
•
•
Shift micro operations are used for serial transfer of data
They are also used in conjunction with arithmetic, logic,
•
•
•
•
•
•
•
•
•
•
•
and other data-processing operations
There are three types of shifts: logical, circular, and arithmetic
A logical shift is one that transfers 0 through the serial input
The symbols shl and shr are for logical shift-left and shiftright by one position R1 ← shl R1
The circular shift (aka rotate) circulates the bits of the
register around the two ends without loss of information
The symbols cil and cir are for circular shift left and right
The arithmetic shift shifts a signed binary number to the left or
right
To the left is multiplying by 2, to the right is dividing by 2
Arithmetic shifts must leave the sign bit unchanged
A sign reversal occurs if the bit in Rn-1 changes in value after the
shift
This happens if the multiplication causes an overflow
An overflow flip-flop Vs can be used to detect the overflow
Vs = Rn-1 ⊕ Rn-2
•
•
•
•
•
A bi-directional shift unit with parallel load could be used to
implement this
Two clock pulses are necessary with this configuration: one to
load the value and another to shift
In a processor unit with many registers it is more efficient to
implement the shift operation with a combinational circuit
The content of a register to be shifted is first placed onto a
common bus and the output is connected to the combinational
shifter, the shifted number is then loaded back into the register
This can be constructed with multiplexers
15
Arithmetic Logic Shift Unit
•
•
•
•
The arithmetic logic unit (ALU) is a common operational unit
connected to a number of storage registers
To perform a micro operation, the contents of specified registers are
placed in the inputs of the ALU
The ALU performs an operation and the result is then transferred to
a destination register
The ALU is a combinational circuit so that the entire register transfer
operation from the source registers through the ALU and into the
destination register can be performed during one clock pulse period
UNIT-IV
What is an Operating System?
A program that acts as an intermediary between a user of a computer and the computer
hardware Operating system goals:
Execute user programs and make solving user problems easier
Make the computer system convenient to use
Use the computer hardware in an efficient manner
Computer System Structure
Computer system can be divided into four components
Hardware – provides basic computing resources
CPU, memory, I/O devices
Operating system
Controls and coordinates use of hardware among various applications and users
Application programs – define the ways in which the system resources are used to
solve the computing problems of the users
Word processors, compilers, web browsers, database systems, video games
Users
People, machines, other computers
Four Components of a Computer System
Operating System Definition
OS is a resource allocator
Manages all resources
Decides between conflicting requests for efficient and fair resource use
OS is a control program
Controls execution of programs to prevent errors and improper use of the computer
No universally accepted definition
Everything a vendor ships when you order an operating system‖ is good
approximation
but varies wildly.
―The one program running at all times on the computer‖ is the kernel. Everything
else is either a system program (ships with the operating system) or an application
program.
Computer System Organization
Computer-system operation
One or more CPUs, device controllers connect through common bus providing
access to shared memory
Concurrent execution of CPUs and devices competing for memory cycles
Computer-System Operation
I/O devices and the CPU can execute concurrently
Each device controller is in charge of a particular device type
Each device controller has a local buffer
CPU moves data from/to main memory to/from local buffers
I/O is from the device to local buffer of controller
Device controller informs CPU that it has finished its operation by causing An
interrupt
Interrupt Handling
The operating system preserves the state of the CPU by storing registers and the
program counter
Determines which type of interrupt has occurred:
polling
vectored interrupt system
Separate segments of code determine what action should be taken for each type of
interrupt
Interrupt Timeline
Storage Hierarchy
Storage systems organized in hierarchy
Speed
Cost
Volatility
Caching – copying information into faster storage system; main memory can be viewed as a
last cache for secondary storage
Caching
Important principle, performed at many levels in a computer (in hardware, operating
system, software)
Information in use copied from slower to faster storage temporarily
Faster storage (cache) checked first to determine if information is there
If it is, information used directly from the cache (fast)
If not, data copied to cache and used there
Cache smaller than storage being cached
Cache management important design problem
Cache size and replacement policy
Computer-System Architecture
Most systems use a single general-purpose processor (PDAs through mainframes)
Most systems have special-purpose processors as well
Multiprocessors systems growing in use and importance
Also known as parallel systems, tightly-coupled systems
Advantages include
1.Increased throughput
degradation or fault tolerance
Two types
2.Economy of scale
1.Asymmetric Multiprocessing
How a Modern Computer Works
Symmetric Multiprocessing Architecture
3.Increased reliability – graceful
2.Symmetric Multiprocessing
A Dual-Core Design
Clustered Systems
Like multiprocessor systems, but multiple systems working together
Usually sharing storage via a storage-area network (SAN)
Provides a high-availability service which survives failures
Asymmetric clustering has one machine in hot-standby mode
Symmetric clustering has multiple nodes running applications, monitoring each
other
Some clusters are for high-performance computing (HPC)
Applications must be written to use parallelization
Operating System Structure
Multiprogramming needed for efficiency
Single user cannot keep CPU and I/O devices busy at all times
Multiprogramming organizes jobs (code and data) so CPU always has one to Execute
A subset of total jobs in system is kept in memory
One job selected and run via job scheduling
When it has to wait (for I/O for example), OS switches to another job
Timesharing (multitasking) is logical extension in which CPU switches jobs so
frequently that users can interact with each job while it is running, creating
interactive computing
Response time should be < 1 second
Each user has at least one program executing in memory [process
If several jobs ready to run at the same time [ CPU scheduling
If processes don‘t fit in memory, swapping moves them in and out to run
Virtual memory allows execution of processes not completely in memory
Memory Layout for Multiprogramming System
Operating-System Operations
Interrupt driven by hardware
Software error or request creates exception or trap
Division by zero, request for operating system service
Other process problems include infinite loop, processes modifying each Other or the
operating system
Dual-mode operation allows OS to protect itself and other system components
User mode and kernel mode
Mode bit provided by hardware
Provides ability to distinguish when system is running user code or kernel code
Some instructions designated as privileged, only executable in kernel mode
System call changes mode to kernel, return from call resets it to user
Transition from User to Kernel Mode
Timer to prevent infinite loop / process hogging resources
Set interrupt after specific period
Operating system decrements counter
When counter zero generate an interrupt
Set up before scheduling process to regain control or terminate program that
exceeds allotted time
System Calls
Programming interface to the services provided by the OS
Typically written in a high-level language (C or C++)
Mostly accessed by programs via a high-level Application Program Interface (API)
rather than direct system call usenThree most common APIs are Win32 API for
Windows, POSIX API for POSIX-based systems (including virtually all versions of
UNIX, Linux, and Mac OS X), and Java API for the Java virtual machine (JVM)
Why use APIs rather than system calls?(Note that the system-call names used
throughout this text are generic)
Example of System Calls
API – System Call – OS Relationship
Memory Management
To provide a detailed description of various ways of organizing memory hardware
To discuss various memory-management techniques, including paging and
segmentation
To provide a detailed description of the Intel Pentium, which supports both pure
segmentation and segmentation with paging
Program must be brought (from disk) into memory and placed within a process for
it to be run
Main memory and registers are only storage CPU can access directly
Register access in one CPU clock (or less)
Main memory can take many cycles
Cache sits between main memory and CPU registers
Protection of memory required to ensure correct operation
Base and Limit Registers
A pair of base and limit registers define the logical address space
Binding of Instructions and Data to Memory
Address binding of instructions and data to memory addresses can happen at three
different stages
Compile time: If memory location known a priori, absolute code can be generated;
must recompile code if starting location changes
Load time: Must generate relocatable code if memory location is not known at
compile time
Execution time: Binding delayed until run time if the process can be moved during
its execution from one memory segment to another. Need hardware support for
address maps (e.g., base and limit registers)
Multistep Processing of a User Program
Logical vs. Physical Address Space
The concept of a logical address space that is bound to a separate physical address
space is central to proper memory management
Logical address – generated by the CPU; also referred to as virtual address
Physical address – address seen by the memory unit
Logical and physical addresses are the same in compile-time and load-time addressbinding schemes; logical (virtual) and physical addresses differ in execution-time
address-binding scheme
Swapping
A process can be swapped temporarily out of memory to a backing store, and then brought
back into memory for continued executionnBacking store – fast disk large enough to
accommodate copies of all memory images for all users; must provide direct access to these
memory imagesnRoll out, roll in – swapping variant used for priority-based scheduling
algorithms; lower-priority process is swapped out so higher-priority process can be loaded
and executednMajor part of swap time is transfer time; total transfer time is directly
proportional to the amount of memory swappednModified versions of swapping are found
on many systems (i.e., UNIX, Linux, and Windows)
System maintains a ready queue of ready-to-run processes which have memory images on
disk
Schematic View of Swapping
Contiguous Allocation
Main memory usually into two partitions:
Resident operating system, usually held in low memory with interrupt vector
User processes then held in high memorynRelocation registers used to protect user
processes from each other, and from changing operating-system code and data
Base register contains value of smallest physical address
Limit register contains range of logical addresses – each logical address must be less
than the limit register
MMU maps logical address dynamically
Dynamic Storage-Allocation Problem
First-fit: Allocate the first hole that is big enough
Best-fit: Allocate the smallest hole that is big enough; must search entire list,
unless ordered by size Produces the smallest leftover hole
Worst-fit: Allocate the largest hole; must also search entire list
Produces the largest leftover hole
First-fit and best-fit better than worst-fit in terms of speed and storage utilization
Fragmentation
External Fragmentation – total memory space exists to satisfy a request, but it is
not contiguous
Internal Fragmentation – allocated memory may be slightly larger than requested
memory; this size difference is memory internal to a partition, but not being used
Reduce external fragmentation by compaction
Shuffle memory contents to place all free memory together in one large block
Compaction is possible only if relocation is dynamic, and is done at execution time.
I/O problem
Latch job in memory while it is involved in I/O
Do I/O only into OS buffers
Paging
Logical address space of a process can be noncontiguous; process is
allocated physical memory whenever the latter is available
Divide physical memory into fixed-sized blocks called frames (size is
power of 2, between 512 bytes and 8,192 bytes)
Divide logical memory into blocks of same size called pagesnKeep
track of all free frames
To run a program of size n pages, need to find n free frames and load
program
Set up a page table to translate logical to physical addresses
Internal fragmentation
Paging Hardware
Paging Model of Logical and Physical Memory
Paging Example
32-byte memory and 4-byte pages
Free Frames
Implementation of Page Table
Page table is kept in main memory
Page-table base register (PTBR) points to the page table
Page-table length register (PRLR) indicates size of the page table
In this scheme every data/instruction access requires two memory accesses. One
for the page table and one for the data/instruction.
The two memory access problem can be solved by the use of a special fast-lookup
hardware cache called associative memory or translation look-aside buffers
(TLBs)
Some TLBs store address-space identifiers (ASIDs) in each TLB entry – uniquely
identifies each process to provide address-space protection for that process
Associative Memory
Associative memory – parallel search
Address translation (p, d)
If p is in associative register, get frame # out
Otherwise get frame # from page table in memory
Page #
Frame #
Paging Hardware With TLB
Effective Access Time
Associative Lookup = e time unit
Assume memory cycle time is 1 microsecond
Hit ratio – percentage of times that a page number is found in the associative
registers; ratio related to number of associative registers
Hit ratio = an Effective Access Time (EAT)
EAT = (1 + e) a + (2 + e)(1 – a)
=2+e–a
Memory Protection
Memory protection implemented by associating protection bit with each frame
Valid-invalid bit attached to each entry in the page table:
―valid‖ indicates that the associated page is in the process‘ logical address space,
and is thus a legal page
―invalid‖ indicates that the page is not in the process‘ logical address space
Valid (v) or Invalid (i) Bit In A Page Table
Shared Pages Example
Structure of the Page Table
Hierarchical Paging
Hashed Page Tables
Inverted Page Tables
Hierarchical Page Tables
Break up the logical address space into multiple page tables
A simple technique is a two-level page table
Two-Level Page-Table Scheme
Two-Level Paging Example
A logical address (on 32-bit machine with 1K page size) is divided into:
a page number consisting of 22 bits
a page offset consisting of 10 bits
Since the page table is paged, the page number is further divided into:
a 12-bit page number
a 10-bit page offset
Thus, a logical address is as follows:
where pi is an index into the outer page table, and p2 is the displacement within the
page of the outer page table
page number
pi
12
Address-Translation Scheme
Three-level Paging Scheme
Hashed Page Tables
page offset
p2
d
10
10
Common in address spaces > 32 bits
The virtual page number is hashed into a page table
This page table contains a chain of elements hashing to the same location
Virtual page numbers are compared in this chain searching for a match
If a match is found, the corresponding physical frame is extracted
Hashed Page Table
Inverted Page Table
One entry for each real page of memory
Entry consists of the virtual address of the page stored in that real memory location,
with information about the process that owns that page
Decreases memory needed to store each page table, but increases time needed to
search the table when a page reference occurs
Use hash table to limit the search to one — or at most a few — page-table entries
Inverted Page Table Architecture
Segmentation
Memory-management scheme that supports user view of memory
A program is a collection of segments
A segment is a logical unit such as:
main program
procedure function
method
object
local variables, global variables
common block
stack
symbol table
arrays
Segmentation Architecture
Logical address consists of a two tuple:
o <segment-number, offset>,
Segment table – maps two-dimensional physical addresses; each table entry has:
base – contains the starting physical address where the segments reside in memory
limit – specifies the length of the segment
Segment-table base register (STBR) points to the segment table‘s location in
memory
Segment-table length register (STLR) indicates number of segments used by a
program;
segment number s is legal if s < STLR
Protection
With each entry in segment table associate:
validation bit = 0 Þ illegal segment
read/write/execute privileges
Protection bits associated with segments; code sharing occurs at segment level
Since segments vary in length, memory allocation is a dynamic storage-allocation
problem
A segmentation example is shown in the following diagram
Segmentation Hardware
Example of Segmentation
Example: The Intel Pentium
Supports both segmentation and segmentation with paging
CPU generates logical address
Given to segmentation unit
Which produces linear addresses
Linear address given to paging unit
Which generates physical address in main memory
Paging units form equivalent of MMU
Logical to Physical Address Translation in Pentium
Intel Pentium Segmentation
Linear Address in Linux
Three-level Paging in Linux
Deadlock
To develop a description of deadlocks, which prevent sets of concurrent
processes from completing their tasks.To present a number of different
methods for preventing or avoiding deadlocks in a computer system
The Deadlock Problem
A set of blocked processes each holding a resource and waiting to acquire a
resource held by another process in the set.
Example :System has 2 disk drives
P1 and P2 each hold one disk drive and each needs another one
Example :semaphores A and B, initialized to 1
P0
P
wait (A);
wait(B)
wait (B);
wait(A)
System Model
Resource types R1, R2, . . ., Rm.CPU cycles, memory space, I/O devices
Each resource type Ri has Wi instances.Each process utilizes a resource as
follows:
request
use
release
Deadlock Characterization
Deadlock can arise if four conditions hold simultaneously
Mutual exclusion: only one process at a time can use a resource
Hold and wait: a process holding at least one resource is waiting to acquire
additional resources held by other processes
No preemption: a resource can be released only voluntarily by the process
holding it, after that process has completed its task
Circular wait: there exists a set {P0, P1, …, P0} of waiting processes such
that P0 is waiting for a resource that is held by P1, P1 is waiting for a
resource that is held by P2, …, Pn–1 is waiting for a resource that is held by
Pn, and P0 is waiting for a resource that is held by P0.
Deadlock Prevention
Restrain the ways request can be made
Mutual Exclusion – not required for sharable resources; must hold for
nonsharable resources
Hold and Wait – must guarantee that whenever a process requests a
resource, it does not hold any other resources.Require process to request
and be allocated all its resources before it begins execution, or allow process
to request resources only when the process has none.Low resource
utilization; starvation possible
Deadlock Avoidance
Requires that the system has some additional a priori information
available.Simplest and most useful model requires that each process declare
the maximum number of resources of each type that it may need.The
deadlock-avoidance algorithm dynamically examines the resource-allocation
state to ensure that there can never be a circular-wait condition.Resourceallocation state is defined by the number of available and allocated
resources, and the maximum demands of the processes
Resource-Allocation Graph Algorithm
nSuppose that process Pi requests a resource Rj.The request can be granted
only if converting the request edge to an assignment edge does not result in
the formation of a cycle in the resource allocation graph
Banker’s Algorithm
nMultiple instancesnEach process must a priori claim maximum usenWhen
a process requests a resource it may have to wait nWhen a process gets all
its resources it must return them in a finite amount of time
Data Structures for the Banker’s Algorithm
Let n = number of processes, and m = number of resources types.
nAvailable: Vector of length m. If available [j] = k, there are k instances of
resource type Rj availablenMax: n x m matrix. If Max [i,j] = k, then process
Pi may request at most k instances of resource type RjnAllocation: n x m
matrix. If Allocation[i,j] = k then Pi is currently allocated k instances of
RjnNeed: n x m matrix. If Need[i,j] = k, then Pi may need k more instances of
Rj to complete its task.Need [i,j] = Max[i,j] – Allocation [i,j]
Safety Algorithm
1.
Let Work and Finish be vectors of length m and n, respectively.
Initialize:Work = Available
Finish [i] = false for i = 0, 1, …, n- 1
2.
Find and i such that both: (a) Finish [i] = false(b) Needi £ Work If no
such i exists, go to step 4
3.
Work = Work + Allocationi Finish[i] = true go to step 2
4.
If Finish [i] == true for all i, then the system is in a safe state
Detection Algorithm
1.
Let Work and Finish be vectors of length m and n, respectively
Initialize:(a) Work = Available(b)
For i = 1,2, …, n, if Allocationi ¹ 0, then
Finish[i] = false;otherwise, Finish[i] = true2. Find an index i such that both:(a)
Finish[i] == false(b)
Requesti £ WorkIf no such i exists, go to step
4
3.
Work = Work + Allocationi Finish[i] = true go to step 24. If Finish[i] ==
false, for some i, 1 £ i £ n, then the system is in deadlock state. Moreover, if
Finish[i] == false, then Pi is deadlocked
Algorithm requires an order of O(m x n2) operations to detect whether
the system is in deadlocked state
Example of Detection Algorithm
nFive processes P0 through P4; three resource types A (7 instances), B (2
instances), and C (6 instances) lCan reclaim resources held by process P0,
but insufficient resources to fulfill other processes; requests lDeadlock
exists, consisting of processes P1, P2, P3, and P4
Detection-Algorithm Usage
nWhen, and how often, to invoke depends on: lHow often a deadlock is likely
to occur?
lHow many processes will need to be rolled back?
one for each disjoint cyclenIf detection algorithm is invoked arbitrarily,
there may be many cycles in the resource graph and so we would not be
able to tell which of the many deadlocked processes ―caused‖ the deadlock.
UNIT-V
File system Interface
To explain the function of file systems To describe the interfaces to file
systems To discuss file-system design tradeoffs, including access methods,
file sharing, file locking, and directory structures To explore file-system
protection.
File Concept
Contiguous logical address spacenTypes:
lData
numeric
character
binary Program
File Structure
nNone - sequence of words, bytes Simple record structure Lines Fixed length
Variable length Complex Structures Formatted document Relocatable load
file Can simulate last two with first method by inserting appropriate control
characters Who decides: Operating system, Program.
Access Methods
nSequential Access read next, write next ,reset , no read after last write,
(rewrite)
nDirect Access read n, write n, position to n, read next,write next ,rewrite n.
n = relative block number
Sequential-access File
Example of Index and Relative Files
Directory Structure
A collection of nodes containing information about all files Both the
directory structure and the files reside on disk Backups of these two
structures are kept on tapes
Disk Structure
Disk can be subdivided into partitions Disks or partitions can be RAID
protected against failure. Disk or partition can be used raw – without a file
system, or formatted with a file system Partitions also known as minidisks,
slices Entity containing file system known as a volume Each volume
containing file system also tracks that file system‘s info in device directory or
volume table of contents As well as general-purpose file systems there are
many special-purpose file systems, frequently all within the same operating
system or computer.
File System Mounting
A file system must be mounted before it can be accessed A unmounted file
system (i.e. Fig. 11-11(b)) is mounted at a mount point
(a)Existing. (b) Unmounted Partition
Mount Point
File Sharing
Sharing of files on multi-user systems is desirablenSharing may be done
through a protection scheme On distributed systems, files may be shared
across a networknNetwork File System (NFS) is a common distributed filesharing method
File Sharing – Multiple Users
User IDs identify users, allowing permissions and protections to be per-user
Group IDs allow users to be in groups, permitting group access rights.
File Sharing – Remote File Systems
Uses networking to allow file system access between systems Manually via
programs like FTP Automatically, seamlessly using distributed file systems
Semi automatically via the world wide web
Protection
File owner/creator should be able to control: what can be done by whom n
Types of access, Read Write ,Execute ,Append ,Delete ,List
15.ADDITIONAL TOPICS
16. UNIVERSITY QUESTON PAPERS OF PREVIOIUS YEARS
17.QUESTION BANK
1. (a) Differentiate between microprogramming and nano programming.
(b) Hardwired control unit is faster than micro programmed control unit.
Justify this
statement.
2.What are the different types of Mapping Techniques used in the usage of
Cache Memory? Explain.
3. (a) Draw the block diagram of a computer system and describe each of its
parts along with their functions. Also designate the information flow
between the parts with arrows.
(b) Explain the term `memory bus bottleneck'.
4. (a) Explain commonly employed bit shift operators such as shift left, right,
circular shift left/right and arithmetic shift left/right. Give 8-bit examples.
(b) Design a circuit for combined shift left/right operations. Assume register
length is 4 bits and employ RS flip-flops.
5. Draw circuit for BCD addition and subtraction. Explain its functionality
with
mathematical background.
6. (a) What are the different types of I/O communication techniques? Give
brief
notes.
(b) In the above techniques, which is the most efficient? Justify your
answer.
7. (a) Explain the variety of techniques available for sequencing of
microinstructions
based on the format of the address information in the microinstruction.
(b) Hardwired control unit is faster than microprogammed control unit.
Justify
this statement.
8. (a) If cache access time is 70 ns, memory access time is 700ns.
i. Compute the formula for average access time.
ii. Compute hit and miss ratios if the average access time is 140ns
(b) Show the memory hierarchy and give the brief explanation.
9. What do you mean by instruction set architecture (ISA). What is the
completeness?
and orthogonality with respect to ISA. What are the design issues related to
ISA?
10. (a) Find the actual number from its IEEE 754 representation.
Sign = 0
Exponent = 1000 0000
Mantissa = 1100 0000 0000 0000 0000 000
(b) What is meant by normalization in oating point representation? Why do
we
need it? What is bias? What normalization is used in IEEE 754 standard?
11.a) Give a detailed account of how a digital computer is organized and
explain its functions clearly.
b) Give a detailed explanation of Data Representation in a digital
computer with suitable examples.
12. Explain the organization of 4 bit combinational circuit shifter. Illustrate
its functioning with an example.
13. Explain the following with examples:
a) Micro Operations
b) Micro Instructions
c) Micro Program
d) Micro Code.
14. With the aid of a flow chart explain either addition or subtraction
operation of floating point numbers at hard ware level.
15. Explain in detail the organization of a functioning of secondary storage
media.
16. Write notes on the following communication protocols:
a) RS 232
b) USB
c) IEEE 1394.
17.Draw and explain program flow of control without and with interrupts.
18.What is Multiprogramming, Multi Tasking and Multiprocessing.
19.What is Operating System? What are the goals of OS.
20.Write Operating System services and functions.
21.What is System call? Explain the categories of System call.
22.Explain Operating System Structure.
23.What is Virtual memory? Explain Demand Paging technique.
24.Explain the following terms
a) Fragmentation b) Swapping
c) Thrashing
25. Explain segmentation scheme for memory management. Give the
segmentation hardware.
26. Explain Page Replacement Algorithm.
a) FIFO b) Optimal
c)LRU
27.. What is paging? Write the Structure of the page table
28.What is Deadlock? Explain Deadlock characteristics.
29.What is deadlock? How is it prevented and detected.
30. Explain Deadlock avoidance problem.
31.Explain the method of recovery from Deadlock
32.Explain the concept of a file and access methods.
33.Explain the structure of file and directory.
34.Explain file sharing and file system mounting.
35.Explain the method of free space management.
36. Explain the allocation methods.
18.Assignment Topics
1. Define: Program, Instruction set, Hardware & software.
2. List out the main function of an Operating System.
3. Explain in details the function units of computer with the help of the
diagram.
4. Explain in brief the concept of stored program.
5. Differentiate between Primary Memory & Secondary Memory.
6. Write to state characteristics of primary memory.
7. Explain in brief the characteristics of storage.
8. Define: System Nucleus, swapping.
9. Write a short note on device controller (Draw necessary diagram).
10.
Explain in brief device interface signals.
11.
Explain in brief the meaning of following terms.
1. I/O Device
2. Word length
3. Memory Capacity
4. Access Time
5. Settling Time
6. Cycle Time
7. Bandwidth
12.
Explain
in
brief
synchronous
interface
&
Asynchronous
interface.
13.
What is Memory Addressability?
14.
Explain Interface Cycle in detail with the help of diagrams.
15.
Explain in brief two steps of CPU.
16.
What is CPU Registers?
17.
What is Cache Memory?
18.
Write short note on CPU registers (draw a diagram)
19.
Define: Frequency, Time period, Pulse width and Duty cycle.
20.
What is Macro Operation? Explain Micro operation with the help
of example.
21.
What is Interrupt Service Routing?
22.
Explain in details the concept of interrupt OR Explain in brief
1. Interrupt service routing,
2. Nested interrupt
3. Interrupt priority
4. Interrupt masking
5. Interrupt non-masking.
23.
Write a short note on method of data transfer or explain in
details software method to transferred data.
24.
Explain in brief the following terms.
1. I/O Routing
2. I/O Drivers
3. I/O Ports
25.
What is BUS? Explain in brief a concept of BUS with help of
simple structure OR Explain in brief the functions of Address BUS,
Data BUS & Control BUS.
26.
Explain in brief the concept of BUS cycle.
27.
Explain in brief the characteristics of different type of computer
(each three have any one).
28.
Explain in brief the factors are response to improve the
performance of a computer.
29.
What is Multiprogramming, Multi Tasking and Multiprocessing.
30.
-What is Operating System? What are the goals of OS.
31.
Write Operating System services and functions.
32.
What is System call? Explain the categories of System call.
33.
Explain Operating System Structure.
34.What is Virtual memory? Explain Demand Paging technique.
35.Explain the following terms
a) Fragmentation b) Swapping
c) Thrashing
36. Explain about segmentation.
37. Explain Page Replacement Algorithm.
a) FIFO b) Optimal
c)LRU
38. What is paging? Write the Structure of the page table.
39. What is Deadlock? Explain Deadlock characteristics.
40.What is deadlock? How is it prevented and detected.
41. Explain Deadlock avoidance problem.
42.Explain the method of recovery from Deadlock.
43.Explain the concept of a file and access methods.
44.Explain the structure of file and directory.
45.Explain file sharing and file system mouting.
46.Explain the method of free space management.
47. Explain the allocation methods.
19.UNIT WISE QUIZ QUESTIONS AND LONG ANSWER QUESTIONS
Q.1Floating point representation is used to store
(A) Boolean values (B) whole numbers (C) real integers (D) integers
Ans: C
Q.2 In computers, subtraction is generally carried out by
(A) 9‘s complement (B) 10‘s complement (C) 1‘s complement (D) 2‘s
complement
Ans: D
Q. 3 (2FAOC)16 is equivalent to
(A) (195 084)10 (B) (001011111010 0000 1100)2 (C) Both (A) and (B) (D)
None of these
Ans: B
Q.4 Which of the following is not a weighted code?
(A) Decimal Number system (B) Excess 3-cod (C) Binary number System (D)
None of these
Ans: B
Q.5 Von Neumann architecture is
(A) SISD (B) SIMD (C) MIMD (D) MISD
Ans: A
Q.6 In signed-magnitude binary division, if the dividend is (11100)2 and
divisor is (10011)2then the result is
(A) (00100)2 (B) (10100)2 (C) (11001)2 (D) (01100)2
Ans: B
Q.7 Logic X-OR operation of (4ACO)H & (B53F)H results
(A) AACB (B) 0000 (C) FFFF (D) ABCD
Ans: C
Q.8When CPU is executing a Program that is part of theOperating System, it
is said to be in
(A)Interrupt mode (B)System mode
(C)Half mode
(D)Simplex mode
Ans: B
Q.9In computers, subtraction is carried out generally by
(A)1's complement method (B)2's complement method (C)signed magnitude
method (D)BCD subtraction method
Ans: B
Q.10The circuit converting binary data in to decimal is
(A)Encoder (B)Multiplexer (C)Decoder (D)Code converter
Ans: D
Q.11Translation from symbolic program into Binary is done in
(A) Two passes. (B) Directly (C) Three passes. (D) Four passes
Ans: A
Q.12 A floating point number that has a O in the MSB of mantissa is said to
have
(A) Overflow (B) Underflow (C) Important number (D) Undefined
Ans: B
Q.13 A binary digit is called a
(A) Bit (B) Byte (C) Number (D) Character
Ans: A
Q14.(-27)10can be represented in a signed magnitude format andin a 1‘s
complement format as
(A)111011 & 100100 (B)100100 & 111011 (C)011011 & 100100 (D) 100100
& 011011
Ans:A
Q15.The 2s compliment form (Use 6 bit word) of the number 1010 is
(A) 111100. (B) 110110. (C) 110111. (D) 1011.
Ans:B
Q.15 In Reverse Polish notation, expression A*B+C*D is written as
(A) AB*CD*+ (B) A*BCD*+ (C) AB*CD+* (D) A*B*CD+
Ans: A
Q.16Assembly language
(A) uses alphabetic codes in place of binary numbers used in machine
language (B) is the easiest language to write programs (C) need not be
translated into machine language
Ans :a
Q.17 Computers use addressing mode techniques for
(A) giving programming versatility to the user by providing facilities as
pointers to memory counters for loop control (B) to reduce no. of bits in the
field of instruction (C) specifying rules for modifying or interpreting address
field of the instruction (D) All the above
Ans: D
Q.18 _________ register keeps track of the instructions stored in program
stored in memory.
(A) AR (Address Register) (B) XR (Index Register) (C) PC (Program Counter)
(D) AC (Accumulator)
Ans: C
Q.19 The addressing mode used in an instruction of the form ADD X Y, is
(A) Absolute (B) indirect (C) index (D) none of these
Ans: C
Q.20 A Stack-organised Computer uses instruction of
(A) Indirect addressing (B) Two-addressing (C) Zero addressing (D) Index
addressing
Ans: C
Q.21 PSW is saved in stack when there is a
(A)interrupt recognised (B)execution of RST instruction (C)Execution of CALL
instruction (D)All of these
Ans: A
Q.22_________ register keeps tracks of the instructions
stored in program stored in memory.
(A) AR (Address Register)
(B) XR (Index Register) (C) PC (Program Counter) (D) AC (Accumulator)
Ans: C
Q.23The instruction ‗ORG O‘ is a
(A) Machine Instruction. (B) Pseudo instruction. (C) High level instruction.
(D) Memory instruction.
Ans: B
Q.24The BSA instruction is
(A)Branch and store accumulator (B)Branch and save return address
(C)Branch and shift address (D)Branch and show accumulator
Ans: B
Q.25The load instruction is mostly used to designate a
transfer from memory to a
processor register known as
(A) Accumulator (B) Instruction Register (C) Program counter (D) Memory
address Register
Ans: A
Q26.Data input command is just the opposite of a
(A) Test command (B) Control command (C) Data output (D) Data channel
Ans: C
Q.27MRI indicates
(A)Memory Reference Information.
(B)Memory Reference Instruction.
(C)Memory Registers Instruction.
(D)Memory Register information
Ans: B
Q.28 If the value V(x) of the target operand is contained in the address field
itself, the addressing mode is
(A)immediate.
(B)direct.
(C)indirect.
(D) implied.
Ans:B
Q29.The instructions which copy information from one location to another
either in the processor‘s internal register set or in the external main memory
are called
(A)Data transfer instructions.
(B)Program control instructions.
(C)Input-output instructions.
(D)Logical instructions.
Ans:A
Q.30A group of bits that tell the computer to perform aspecific operation is
known as
(A) Instruction code (B) Micro-operation (C) Accumulator (D) Register
Ans: A
Q.31he communication between the components in a microcomputer takes
place via the address and
(A) I/O bus (B) Data bus (C) Address bus (D) Control lines
Ans: B
Q.32 A microprogram sequencer
(A)generates the address of next micro instruction to be executed.
(B)generates the control signals to execute a microinstruction.
(C)sequentially averages all microinstructions in the control memory.
(D)enables the efficient handling of a micro program subroutine.
Ans: A
Q33. Microinstructions are stored in control memory groups, with each
group specifying a
(A) Routine
(B) Subroutine
(C) Vector
(D) Address
Ans: A
Q.34Status bit is also called
(A) Binary bit (B) Flag bit
(C) Signed bit (D) Unsigned bit
Ans: B
Q35.The maximum addressing capacity of a micro processor which uses 16
bit database & 32 bit address base is
(A)64 K.
(B)4 GB.
(C)both (A)& (B)
.(D)None of these.
Ans:B
Q36. A microprogram is sequencer perform the operation...
A) read
B) write
C) read and write
D) read and execute
Ans :D
Q37) The Purpose of Co-operating Process is __________.
1 Information Sharing
2 Convenience
3 Computation Speed-Up
4 All of the above
Right Ans ) 4
Q38) The kernel of the operating system remains in the primary memory
because ________.
1 It is mostly called (used)
2 It manages all interrupt calls
3 It controls all operations in process
4 It is low level
Right Ans ) 1
Q39) The process related to process control, file management, device
management, information about system and communication that is
requested by any higher level language can be performed by __________.
1 Editors
2 Compilers
3 System Call
4 Caching
Right Ans ) 3
Q40) The operating system of a computer serves as a software interface
between the user and the ________.
1 Hardware
2 Peripheral
3 Memory
4 Screen
Right Ans ) 1
Q41) Super computers typically employ _______.
1 Real time Operating system
2 Multiprocessors OS
3 desktop OS
4 None of the above
Right Ans ) 2
Q42) A process that is based on IPC mechanism which executes on different
systems and can communicate with other processes using message based
communication, is called ________.
1 Local Procedure Call
2 Inter Process Communication
3 Remote Procedure Call
4 Remote Machine Invocation
Right Ans ) 3
Q43) A process is
1 program in execution
2 a concurrent program
3 any sequential program
4 something which prevents deadlock
Right Ans ) 1
Q44) Round robin scheduling is essentially the preemptive version of
________.
1 FIFO
2 Shortest job first
3 Shortes remaining
4 Longest time first
Right Ans ) 1
Q45) A page fault occurs
1 when the page is not in the memory
2 when the page is in the memory
3 when the process enters the blocked state
4 when the process is in the ready state
Right Ans ) 1
Q46) Which of the following will determine your choice of systems software
for your computer ?
1 Is the applications software you want to use compatible with it ?
2 Is it expensive ?
3 Is it compatible with your hardware ?
4 Both 1 and 3
Right Ans ) 4
Q47) Let S and Q be two semaphores initialized to 1, where P0 and P1
processes the following statements wait(S);wait(Q); ---; signal(S);signal(Q)
and wait(Q); wait(S);---;signal(Q);signal(S); respectively. The above situation
depicts a _________ .
1 Semaphore
2 Deadlock
3 Signal
4 Interrupt
Right Ans ) 2
Q48) What is a shell ?
1 It is a hardware component
2 It is a command interpreter
3 It is a part in compiler
4 It is a tool in CPU scheduling
Right Ans ) 2
Q49) Routine is not loaded until it is called. All routines are kept on disk in
a relocatable load format. The main program is loaded into memory & is
executed. This type of loading is called _________
1 Static loading
2 Dynamic loading
3 Dynamic linking
4 Overlays
Right Ans ) 3
Q50) In the blocked state
1 the processes waiting for I/O are found
2 the process which is running is found
3 the processes waiting for the processor are found
4 none of the above
Right Ans ) 1
Q51) What is the memory from 1K - 640K called ?
1 Extended Memory
2 Normal Memory
3 Low Memory
4 Conventional Memory
Right Ans ) 4
Q52) Virtual memory is __________.
1 An extremely large main memory
2 An extremely large secondary memory
3 An illusion of extremely large main memory
4 A type of memory used in super computers.
Right Ans ) 3
Q53) The process related to process control, file management, device
management, information about system and communication that is
requested by any higher level language can be performed by __________.
1 Editors
2 Compilers
3 System Call
4 Caching
Right Ans ) 3
Q54) If the Disk head is located initially at 32, find the number of disk
moves required with FCFS if the disk queue of I/O blocks requests are
98,37,14,124,65,67.
1 310
2 324
3 315
4 321
Right Ans ) 4
Q55) Multiprogramming systems ________.
1 Are easier to develop than single programming systems
2 Execute each job faster
3 Execute more jobs in the same time
4 Are used only on large main frame computers
Right Ans ) 3
Q56) Which is not the state of the process ?
1 Blocked
2 Running
3 Ready
4 Privileged
Right Ans ) 4
Q57) The solution to Critical Section Problem is : Mutual Exclusion,
Progress and Bounded Waiting.
1 The statement is false
2 The statement is true.
3 The statement is contradictory.
4 None of the above
Right Ans ) 2
Q58) The problem of thrashing is effected scientifically by ________.
1 Program structure
2 Program size
3 Primary storage size
4 None of the above
Right Ans ) 1
Q59) The state of a process after it encounters an I/O instruction is
__________.
1 Ready
2 Blocked/Waiting
3 Idle
4 Running
Right Ans ) 2
Q60) The number of processes completed per unit time is known as
__________.
1 Output
2 Throughput
3 Efficiency
4 Capacity
Right Ans ) 2
Q61) _________ is the situation in which a process is waiting on another
process,which is also waiting on another process ... which is waiting on the
first process. None of the processes involved in this circular wait are making
progress.
1 Deadlock
2 Starvation
3 Dormant
4 None of the above
Right Ans ) 1
Q62) Which of the following file name extension suggests that the file is
Backup copy of another file ?
1 TXT
2 COM
3 BAS
4 BAK
Right Ans ) 4
Q63) Which technique was introduced because a single job could not keep
both the CPU and the I/O devices busy?
1 Time-sharing
2 SPOOLing
3 Preemptive scheduling
4 Multiprogramming
Right Ans ) 4
Q64) A critical region
1 is a piece of code which only one process executes at a time
2 is a region prone to deadlock
3 is a piece of code which only a finite number of processes execute
4 is found only in Windows NT operation system
Right Ans ) 1
Q65) The mechanism that bring a page into memory only when it is needed
is called _____________
1 Segmentation
2 Fragmentation
3 Demand Paging
4 Page Replacement
Right Ans ) 3
Q66) PCB =
1 Program Control Block
2 Process Control Block
3 Process Communication Block
4 None of the above
Right Ans ) 2
Q67) FIFO scheduling is ________.
1 Preemptive Scheduling
2 Non Preemptive Scheduling
3 Deadline Scheduling
4 Fair share scheduling
Right Ans ) 2
Q68) Switching the CPU to another Process requires to save state of the old
process and loading new process state is called as __________.
1 Process Blocking
2 Context Switch
3 Time Sharing
4 None of the above
Right Ans ) 2
Q69) Which directory implementation is used in most Operating System?
1 Single level directory structure
2 Two level directory structure
3 Tree directory structure
4 Acyclic directory structure
Right Ans ) 3
Q70) The Banker¿s algorithm is used
1 to prevent deadlock in operating systems
2 to detect deadlock in operating systems
3 to rectify a deadlocked state
4 none of the above
Right Ans ) 1
Q71) A thread
1 is a lightweight process where the context switching is low
2 is a lightweight process where the context switching is high
3 is used to speed up paging
4 none of the above
Right Ans ) 1
Q72) ______ is a high level abstraction over Semaphore.
1 Shared memory
2 Message passing
3 Monitor
4 Mutual exclusion
Right Ans ) 3
20.REFERENCES, JOURNALS, WEBSITES AND E-LINKS IF
ANY
WEBSITES:
1. https://www.cs.dal.ca/~mheywood/CSCI3121.
2. uic.edu.hk/~hpguo/teaching/spring2011/co/index.html
3. The Journal of Computer and System Sciences (JCSS) is a peerreviewed scientific journal in the field of computer science. JCSS is
published by Elsevier,Gödel Prize.[1], 1967.
4. The Computing Research and Education Association of Australasia.
July 2008.
http://www.core.edu.au/journal%20rankings/Journal%20Rankings.
html. Retrieved 22 August 2009.[dead link]
REFERENCES
1.computer organization and architecture-William Stallings 6th Edition,
Pearson