Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
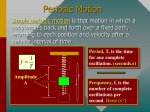
SIMPLE HARMONIC OSCILLATION Prepared by; Dr. Rajesh Sharma Assistant Professor Dept of Physics P.G.G.C-11, Chandigarh Email: [email protected] • Periodic Motion: any motion of system which repeats itself at regular, equal intervals of time. • Oscillatory or vibratory motion: A periodic to and fro motion of a particle or body about a fixed point is called oscillatory or vibratory motion. • The trigonometric functions sines and cosines are periodic as well as bounded, so the oscillatory motions can be expressed in terms of sine and cosine functions or harmonic functions. • All the oscillatory motions are periodic motion but all periodic motions are not oscillatory. SIMPLE HARMONIC MOTION:SHM • Simple Harmonic Motion (SHM) refers to a certain kind of oscillatory, or wave-like motion that describes the behavior of many physical phenomena: – a pendulum – a bob attached to a spring – low amplitude waves in air (sound), water, the ground – the electromagnetic field of laser light – vibration of a plucked guitar string – the electric current of most AC power supplies – …etc S.H.M. • SHM is a special type of oscillatory motion in which a particle or body moves to an fro repeatedly about a mean (or equilibrium) position under the influence of a restoring force which is always directed towards the mean position and whose magnitude at any instant of time is directly proportional to the displacement of the particle from the mean position at that instant. • Let x be the displacement of a particle of, executing SHM, from its mean position at any instant of time, then the resorting force acting on the particle on that instant is given by F = - kx • Where k is known as the force constant or stiffness constant and the –ve sign shows that the restoring force is always directed towards the mean position. Spring Constant, K The constant k is called the spring constant. SI unit of k = N/m. Simple Harmonic Motion When there is a restoring force, F = -kx, simple harmonic motion occurs. Geometrical interpretation of SHM • • • • A particle P moving on a circle of radius r with uniform angular velocity w. This is known as Circle of Reference. M is the projection of the particle P on the diameter YOY’. When the particle P completes the circle from XY X’ Y’ X, the projection of the particle P i.e. M will move from O Y O X’ Y’ O. so, during this time in which the particle completes one revolution, its projection M completes one oscillation. This motion of the projection M, on the diameter YOY’ is called Simple Harmonic Motion. Thus, the geometrical definition of SHM is the projection of uniform circular motion on any of the diameters of the circle of reference. Y P M y r wt O Y’ Fig. 1 X Position VS. Time graph : Displacement Displacement • It is defined as the distance of the oscillating particle in a particular direction from the mean position at any instant of time. In figure 1, the displacement of the particle at any Y instant of time t is given by y P M • In OMP OM sin wt OP OM y OP sin wt y r sin wt y r wt X’ O Y’ X Amplitude Amplitude is the magnitude of the maximum displacement on either side of the mean position. Velocity • It is defined as the rate of change of the displacement with respect to time at any instant of time. dy d v r sin wt dt dt v rw cos wt Acceleration • It is defined as the rate of change of the velocity with respect to time at any instant of dv d time. a rw cos wt dt dt a rw 2 sin wt w 2 y Period, T For any object in simple harmonic motion, the time required to complete one cycle is the period T. Time T angular displaceme nt angular ve locity 2 w but a w 2 y a w2 y w a y then, 2 y T 2 a a y T 2 Displaceme nt Accelerati on (taking magnitude only) Frequency, f The frequency f of the simple harmonic motion is the number of cycles of the motion per second. Phase • It determines the status of the particle as regards its position and direction of motion. It is expressed either in terms of the angle swept by the radius vector of the particle since it crossed its mean position or as the fraction of the time interval that has lapsed since the particle crossed the mean position. • wt, (wt+f) or (wt-f) are called phase angles. Initial phase or Epoch • It is the phase of an oscillating particle at time t = 0. if a particle has initial phase a or - a then y = r sin (wt-a) or y = r sin (wt+a) HOOKE'S LAW The restoring force of an ideal spring is given by, where k is the spring constant and x is the displacement of the spring from its unstrained length. The minus sign indicates that the restoring force always points in a direction opposite to the displacement of the spring. • A constant value of the stiffness restricts the displacement x to small values (this is Hooke’s Law of Elasticity). The stiffness s is obviously the restoring force per unit distance (or displacement) and has the dimensions Force MLT 2 Distance L Differential equation of SHM • When an oscillator is displaced from it mean position, a resorting force is developed in the system, which tries to regain the mean position of the oscillator. This restoring force is directly proportional to the displacement of the oscillator and is always directed towards the mean position (Hook’s law) • The equation of motion of such a disturbed system is given by the dynamic balance between the forces acting on the system, which by Newton’s Law is mass X acceleration = restoring force since, Restoring force F - S Displaceme nt where, S is the stiffness constant. Now, d2y F my m 2 dt my Sy S y y 0 m S 2 has the dimensions of T , m square of the angular frequency w 2 , also has the same dimensions . So, putting we get, y w 2 y 0 S w2 m • This is the standard second degree differential equation of SHM • The general solution of the above eq. is y = r sin (wt+a)