Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hunting oscillation wikipedia , lookup
Fictitious force wikipedia , lookup
Analytical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Equations of motion wikipedia , lookup
Statistical mechanics wikipedia , lookup
Frictional contact mechanics wikipedia , lookup
Virtual work wikipedia , lookup
Seismometer wikipedia , lookup
Mass versus weight wikipedia , lookup
Centrifugal force wikipedia , lookup
Classical mechanics wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
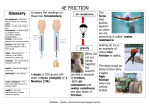
Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Engineering Mechanics/1st Stage Syllabus: I-Statics 1- Basic concepts 2- Resultant of force system 3- Equilibrium 4- Friction 5- Centroid and center of gravity 6- Second moment area or moment of inertia II-Dynamic 1- Kinematics-Absolute motion 2- Kinematics-Relative motion 3- Kinetics-force, mass and acceleration Textbook 1- Engineering Mechanics A. Higdon. 2- Engineering Mechanics, statics and dynamic R.C Hibbeler. References 1- Engineering Mechanics F.L Singer. 2- Mechanics of Engineering F.P Bear. Chapter One: Basic Concepts Mechanics:- is the branch of physical science which considers the motion of bodies, with rest being consider a special case of motion. Engineering mechanics:- is essentially a study of the external effects of a system of forces acting on a rigid body. The mechanics of rigid bodies subdivided into: 1 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori I-Statics When the force system acting on a body is balanced, the system has no external effects on the body. The body is in equilibrium and the problem is one of statics. I-Dynamics When the force system has a resultant different from zero, the body will be accelerated and the problem is one of dynamics scalar and vector quantities. Scalar: Physical quantities which has only magnitude (mass, volume, time, area,….) Vector: Physical quantities which has both magnitude and direction (force, velocity, displacement,.….) Force on a Particle: Force: the action of one body on another body which changes or tends to change the motion of the body acted on. Characteristics of a Force: Which describe its external on a rigid body: B 1-Magnitude 200 N 2-Direction 3-Line (point) of action Action point A Principle of Transmissibility: The external effect of a force on a 2 rigid body is independent of Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori the point application of the force along its line of action. Force System: when several forces act in given situation they are called a system of forces or a force system. Force System A: Coplanar force system (in B: Non-coplanar force system (in plane) space) A: 1- Concurrent: 2- Parallel: F1-F2, F1-F6, F4-F6, F1-F3 F4-F5 3- Non-concurrent, non-parallel (general): F1-F3-F7 B: 1- Concurrent: 2- Parallel: F1-F2-F3 F3-F4-F5 3- Non-concurrent, non-parallel (general): Y-axis F2-F6-F7 F2 F1 F3 F7 F6 F5 F4 Z-axis 3 X-axis Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Chapter Two: Resultant of force system Resultant: Simplest force system which have same external effect of the original system. 1-Resultant of concurrent coplanar force system 2-Resultant of parallel coplanar force system 3-Resultant of general coplanar force system Chapter Three: Equilibrium Equilibrium: A situation or condition of body when a system of forces acting on it has no resultant (i.e resultant = 0) Free Body Diagram (F.B.D): A sketch of a body, a portion of a body completely isolated or free from all other bodies, showing the forces exerted by all other bodies on the one being considered. 1- Earth: Always a vertical force equal to the weight and passing through the center of gravity of the body. c.g body Earth W 4 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori 2- Flexible Cord, Rope, Cable Strand: Always a single force (tension) along the cable. T Φ Body Φ Body 3- Smooth Surface: Always a single force perpendicular to the smooth surface Body Body Φ Φ N 4- Roller or Ball: Always a force perpendicular to the surface on which roller or ball can move Body Body Body R 5- Smooth Pin: A force through the pin at unknown angle usually shows as two independent components. 5 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Body RX Body Ry 6- Fixed Support: R A force at the cut section at an unknown angle, usually shown as two perpendicular components and a couple. RX Body Body M Ry Chapter Four: Friction When a body slides or tends to slides on another body, the force tangent to the contact surface which resists the motion or the tendency toward motion of one body relative to the others is defined as friction. Friction: due to: - irregularities of the surface. - molecular attraction. 6 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Theory of Friction: (Static and Kinetic Friction) Friction Force (F) Equilibriu m motion a b a Relative velocity between contact surface b Applied Load (P) The static frictional force is always the minimum force required to maintain equilibrium or prevent motion. When one body moves relative to another body, the resisting force between the bodies tangent to the contact surface is called kinetic friction. Note: The frictional force between two bodies always opposes the relative motion of the bodies or the tendency to move. 7 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Coefficient of Friction: The frictional force between two bodies always opposes the relative motion of the bodies or the tendency to move. Coefficient of Static Friction The ratio of the magnitude of the maximum frictional force (F'), to the magnitude of the normal force (N), between the two surfaces. F' N A A P P W W F ' N F.B.D -The coefficient of friction is an experimentally determined contact which depends on the materials from which the contacting bodies are made and on the condition of the contact surfaces. 8 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori Angle of Friction: A A A P P=0 P W W W R=N Φ F ' R N N - If no applied load (P=0), the resultant R reduces to the normal force N (R=N). - Which increasing the applied load from zero to a certain value, the force R will have a horizontal component F and, thus, will form a certain angle with the vertical. - If the applied force is increased until motion becomes impending, the angle between R and vertical grows and reaches a maximum value is called the angle of friction. Types of Problem Involving Frictional Forces: We must know whether the magnitude of the friction is equal to or less than the limiting or maximum friction (F'= .N). 9 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori It is usually desirable to classify problems involving frictional forces according to the available data to: 1-impending motion is not assured from the statement of the problem. 2-impending or relative motion is specified at all contact surfaces where there are frictional forces. 3-impending motion is known to exist, but either the type of impending movement (slipping or tipping) is not specified, or the surface or surfaces where motion impends are not specified. Chapter Five: Centroid and Center of Gravity - A body consists of a number of particles each of which has a weight or force of attraction directed toward the center of the earth. The resultant of this parallel system of gravitational forces in space is the weight of the body. - The resultant weight passes through one point in the body, or the body extended, for all orientations of the body, and this point is defined as the center of gravity or center of mass of the body. 10 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori The resultant weight of the plate can be determined by considering the plate to be made up of an infinite number of small elements each having a weight given by: dW t d A Where: dW = weight of an element = specific weight t = thickness of the plate d A = area of the element (surface area in XY-plate) The total weight of the plate is: W t dA W dW The coordinates of a point of the line of action of the resultant weight can be determined by the principle of moments: dM X d w y t d A y M X dM X t y d A dM Y d w x t d A x M Y dM Y t x d A M x t y dA y W t dA 11 Engineering Mechanics/1st Stage……...…..…. Dr. Fatimah H. N. Al Mamoori x My W t x d t d A A - The center of gravity of the body is one a line parallel to the Zaxis through the point (x', y'). When t and Ɣ are constant, z' can be obtained by symmetry. If either t or Ɣ is a variable, the plate can be rotated so that either the x-axis or the y-axis is vertical. Then the principal of moments. given: z d z' d v v when dv is equal to (dA ×dt) - Since the center of gravity of a body id defined as appoint, three coordinates are necessary to indicate completely its position. 12