Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
5
Complex Numbers and Functions
Consider the polynomial equation x2 + 3x + 2 = 0. Since x2 + 3x + 2 = (x + 1)(x + 2), the two
solutions are x = −1 and x = −2. Unfortunately not all such equations have (real number)
solutions. For example, since x2 > 0 for all x ∈ R,
x2 + 1 > 0 + 1 = 1 > 0 for all x ∈ R ⇒ x2 6= −1 for all x ∈ R.
To get round this problem we introduce the symbol i whose defining property is that it satisfies
the equation
i2 = −1.
It is clear from its definition that i ∈
/ R. [In engineering texts j is often used instead of i for
the square root of −1, to avoid conflict with the notation for electrical current.]
A complex number is any symbol of the form z = x + iy, or z = x + yi, where x and y
are any two real numbers. The real part of z is the number x; the imaginary part of z is y
— note in particular that both parts are real numbers. They are denoted
Re z = x,
Im z = y.
The set of all complex numbers is denoted by C. Given z, w ∈ C, if we have z = x + iy and
w = u + iv for some x, y, u, v ∈ R, then we define equality in C by saying
z = w ⇔ x = u and y = v ⇔ Re z = Re w and Im z = Im w.
That is, two complex numbers are equal if and only if their real and imaginary parts are
equal. The set of real numbers can be thought of as a subset of the complex numbers by
identifying x ∈ R with x + 0i ∈ C. Indeed, we will write x in place of x + 0i in such cases,
and similarly write iy instead of 0 + iy.
5.1
Arithmetic in C
Addition, subtraction and multiplication in C all have obvious definitions which run as follows,
where again z = x + iy and w = u + iv:
z + w = (x + iy) + (u + iv) = (x + u) + i(y + v),
z − w = (x + iy) − (u + iv) = (x − u) + i(y − v),
zw = (x + iy)(u + iv) = xu + ixv + iyu + i2 yv
= (xu − yv) + i(xv + yu).
In particular it follows from these definitions that z − w = z + (−1)w — subtraction is
essentially defined in terms of the other two operations.
For example if z = 1 + 2i and w = 3 − 5i then
z + w = (1 + 3) + (2 − 5)i = 4 − 3i,
z − w = (1 − 3) + 2 − (−5) i = −2 + 7i,
zw = (1 + 2i)(3 − 5i) = 1 × 3 − 2 × (−5) + i 1 × (−5) + 2 × 3
= 13 + i.
Before defining division, we need the complex conjugate of a complex number z = x + iy
which is z = x − iy, i.e. the number obtained by changing the sign of the imaginary part. So
if z = 1 + 2i and w = 3 − 5i as above then z = 1 − 2i and w = 3 + 5i. Note that in general
zz = (x − iy)(x + iy) = x2 + ixy − iyx − i2 y 2 = x2 + y 2 .
82
COMPLEX NUMBERS AND FUNCTIONS
So if z 6= 0, that is, if either x 6= 0 or y 6= 0, then x2 > 0 or y 2 > 0 and so zz > 0, a positive
real number. If z = x + iy, and t ∈ R with t 6= 0, then the obvious definition of division in
this case is
z
x
y
= +i .
t
t
t
In general, if w = u + iv 6= 0 then ww = u2 + v 2 > 0, and we want to define division so that
1
w
it is the same as multiplication by , and so that
= 1. But then
w
w
1
1w
w
u − iv
1
=
=
= 2
= 2
× (u − iv)
2
w
ww
ww
u +v
u + v2
and so division by w can be defined by dividing by the real number u2 + v 2 , and then
multiplying by the conjugate u − iv of w. So if z = x + iy then we define
z
zw
zw
xu + yv
yu − xv
=
=
= 2
+i 2
.
w
ww
ww
u + v2
u + v2
For example if we take z = 1 + 2i and w = 3 − 5i once more then
1 + 2i
(1 + 2i) (3 + 5i)
3 + 5i + 6i − 10
−7 11
z
=
=
=
=
+ i.
w
3 − 5i
(3 − 5i) (3 + 5i)
9 + 15i − 15i + 25
34
34
The modulus of the complex number z = x + iy is defined to be
p
|z| = x2 + y 2 = (zz)1/2 .
Note that z = 0 precisely when |z| = 0.
Having introduced all of these definitions it is then not too hard to show that the following
rules apply to arithmetic in C:
z1 + z2 = z2 + z1 ;
z1 z2 = z2 z1 ;
(z1 + z2 ) + z3 = z1 + (z2 + z3 );
(z1 z2 )z3 = z1 (z2 z3 ); (z1 + z2 )z3 = z1 z3 + z2 z3 ; z1 + z2 = z1 + z2
z
z1 |z1 |
z
z1 z2 = z1 z2 ;
= ; |z| = |z|; |z1 z2 | = |z1 ||z2 |; =
;
w
w
z2
|z2 |
Re z = 21 (z + z);
Im z =
1
2i (z
− z).
We motivated the introduction of complex numbers to allow us to solve polynomial equations which do not have real number solutions. That the above is the right way to do this is
confirmed by the following:
The Fundamental Theorem of Algebra. Any polynomial of degree n has n roots in C,
if we allow for repeated roots. That is, given any numbers an , an−1 , . . . , a2 , a1 , a0 ∈ C with
an 6= 0, there are further numbers α1 , α2 , . . . , αn ∈ C such that
an z n + an−1 z n−1 + · · · + a2 z 2 + a1 z + a0 = an (z − α1 )(z − α2 ) · · · (z − αn ).
Exercise 5.1. Derive the identities z1 + z2 = z1 + z2 and Im z =
Solution.
83
1
2i (z
− z)
Geometrical interpretation: the complex plane
5.2
Geometrical interpretation: the complex plane
The fact that any complex number z = x + iy is specified by a pair of real numbers means
that we can identify
pz with the point (x, y) in the plane. Note that with this interpretation,
the modulus |z| = x2 + y 2 is nothing but the distance of this point (x, y) from the origin.
Also, we can view addition in this context as an application once more of the parallelogram
law for addition of vectors, an immediate consequence of which is the triangle inequality:
|z + w| 6 |z| + |w| for all z, w ∈ C.
imaginary axis
x
z+w
z = x + iy
w
y
z
real axis
z−w
−w
Since the modulus corresponds to a distance, in particular since |z − w| represents the
distance between z and w in the above diagram, we can use this function to describe geometric
objects in a succinct fashion. For example the equation
z − (1 + i) = 2
is satisfied by all those complex numbers z that are a distance 2 from the point 1 + i. That
is, all the points on the circle with centre 1 + i and
with radius
2.
In a similar way the equation z − (1 + 3i) = z − (5 + i) is satisfied by all those points
that are equidistant from the points 1 + 3i and 5 + i in the complex plane. Thus z satisfies this
equation precisely if it lies on the line that is the perpendicular bisector of the line segment
joining 1 + 3i to 5 + i. Along this line segment the change in the real part is 5 − 1 = 4, and
the corresponding change in the imaginary part is 1 − 3 = −2, so the midpoint of the line
segment is
1 + 3i + 21 (5 + i) − (1 + 3i) = (1 + 3i) + (2 − i) = 3 + 2i = 12 (1 + 3i) + (5 + i) .
1
Moreover the slope of the line segment connecting the points has gradient −2
4 = − 2 , so the
1
slope of the perpendicular bisector is − −1/2 = 2, and hence this line has equation
y − 2 = 2 × (x − 3) ⇔ y = 2x − 4,
in terms of the real and imaginary parts of z.
y = 2x − 4
2
1 + 3i
1+i
3 + 2i
5+i
84
COMPLEX NUMBERS AND FUNCTIONS
Exercise 5.2. Use |z|2 = (Re z)2 +(Im z)2 to derive the equation of the perpendicular bisector
of the line segment from 1 + 3i to 5 + i in the form y = mx + c.
Solution.
Exercise 5.3. Which region of the complex plane is described by the inequality |z|2 > z + z?
Solution.
5.2.1
Polar representation
If z 6= 0 then its position in the plane can be specified by its distance r from the origin and
its argument, denoted arg z, which is the angle θ between the line connecting z to 0 and the
positive real axis, with θ measured in an anticlockwise direction. Note that r = |z|, which is
uniquely determined by z, but that the argument θ is not uniquely determined since we can
go round the origin in either direction any whole number of times, so that θ − 2π, θ + 2π,
85
Complex-valued functions
θ + 4π etc. are all alternative values for the argument. If θ is chosen so that −π < θ 6 π then
this value is known as the principal argument.
If we are given r and θ then by standard trigonometry
we have Re z = r cos θ and Im z = r sin θ, so that
r cos θ
z = r cos θ + ir sin θ
r
On the other hand given z we know that r = |z|, and find
r sin θ
that
Im z
r sin θ
θ
=
.
tan θ =
r cos θ
Re z
Im z
,
However, we cannot conclude from this that θ = tan−1
Re z
since the usual definition of the inverse tangent only takes
π
π
values between − and , and so will give the wrong answers for numbers such as z = −1−i.
2
2
3π
π
This z has argument − , not tan−1 (1) = .
4
4
By writing complex numbers in polar form, we find the geometrical meaning of multiplication — the analogue to the parallelogram rule for addition. Indeed, if
z = r(cos θ + i sin θ) and w = s(cos ϕ + i sin ϕ)
then their product is
That is,
h
i
zw = rs (cos θ cos ϕ − sin θ sin ϕ) + i(sin θ cos ϕ + cos θ sin ϕ)
= rs cos(θ + ϕ) + i sin(θ + ϕ) .
|zw| = |z||w| and arg(zw) = arg z + arg w.
So, if we are dealing with a multiplication by a fixed number w, then its effect is to scale
everything by a factor of |w|, and change all arguments by adding arg w, that is, rotating
everything anticlockwise by this amount.
A similar calculation, assuming w 6= 0, shows that
z
z
|z|
and arg
= arg z − arg w.
=
w
|w|
w
5.3
Complex-valued functions
We will consider two types of function that take values in the complex plane. One type
depends on a real argument, the other on a complex argument. That is, we consider functions
f : R → C and g : C → C.
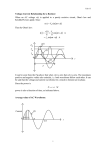
Functions of the first type include f (t) = t2 + i(1 − et), or f (t) = cos t + i sin t. As we vary
t we get a new point on the plane, and the collection of all points obtained from f produces
a curve (if f is well-behaved).
p
For example if f (t) = cos t + i sin t then |f (t)| = cos2 t + sin2 t = 1 for all t, and so f (t)
is a constant distance of 1 from the origin. Evaluating f at various values of t gives:
t=
0
π
4
f (t) =
1
√1 (1
2
+ i)
π
2
3π
4
i
√1 (−1
2
π
+ i) −1
3π
2
2π
−i
1
9π
4
√1 (1
2
That is, f (t) travels round the unit circle in an anticlockwise direction.
86
···
+ i) · · ·
COMPLEX NUMBERS AND FUNCTIONS
Similarly we can describe straight lines, by setting
z = (at + b) + i(ct + d) = (b + id) + t(a + ic),
for real numbers a, b, c, d ∈ R. This is the parametric equation of the line through the point
b + id in the direction specified by a + ic.
For any such function f : R → C we can take real and imaginary parts, and obtain
functions u : R → R and v : R → R:
u(t) = Re f (t),
v(t) = Im f (t).
If we take our first example, f (t) = t2 + i(1 − et ), then u(t) = t2 and v(t) = 1 − et .
A function f : R → C is continuous at a ∈ R if f (t) approaches the value f (a) as t → a.
To be more precise, this means that |f (t) − f (a)| → 0 as t → a, where this limit is one
involving real numbers. An equivalent definition is that f is continuous at t = a if both of
the real-valued functions u(t) = Re f (t) and v(t) = Im f (t) are continuous at that point.
Similarly, f is differentiable at t = a, with derivative f ′ (a), if
f (a + h) − f (a)
= f ′ (a)
h→0
h
lim
exists. Again, an alternative, equivalent definition is that f is differentiable at t = a if the
functions u and v for real and imaginary parts are both differentiable there, in which case
f ′ (t) = u′ (t) + iv ′ (t).
So, for example,
f (t) = t2 + i(1 − et )
g(t) = cos t + i sin t
⇒
⇒
f ′ (t) = 2t − iet ,
g ′ (t) = − sin t + i cos t.
The second type of function (the one that we are more interested in for this course) are
functions from C back to C. Simple examples include
f (z) = 2z 3 − 3iz + 5 − 7i,
g(z) = z − |z|2 ,
h(z) =
z2 + 9
.
z2 + 4
The first two make good sense for any choice of z. Since z 2 + 4 = (z + 2i)(z − 2i), h(z) is not
defined when z = ±2i.
It is less easy to give a geometrical view of such functions than say for functions R → R,
when we can picture the graph, or functions R2 → R, when we can picture the surface, or
functions R → C, when we can picture the curve or path in the plane. Indeed, the analogue
to writing y = f (x) for functions R → R is to write w = f (z), where z is the input variable,
which is viewed as a point in one plane, and w = f (z), the value coming from the function,
is a point in another plane.
z
w = f (z)
87
Complex-valued functions
Exercise 5.4. Consider the mapping w = f (z) = (2 + i)z + 3. Find the image of the line
y = 3x + 1 under this mapping, where z = x + iy.
Solution.
It can be difficult to picture overall what such a function is doing, but it is often possible
to determine the image in the w-plane of various figures or shapes in the z-plane.
For example, fix complex numbers a, b ∈ C with a 6= 0, and define w = az + b. Then we
can rearrange:
w−b
.
w = az + b ⇔ z =
a
Now any circle in the z-plane has equation |z − α| = r, where α ∈ C is the centre and r > 0
is the radius. If w = az + b then the image of this circle is
w − b
= r ⇔ w − b − aα = |w − b − aα| = r ⇔ |w − (b + aα)| = r|a|.
−
α
a
a
|a|
That is, the image is a circle with centre aα + b, and radius r|a|.
On the other hand any straight line in the z-plane has an equation of the form |z − α| =
|z − β|, where α ∈ C is a point off of the line, and β is its reflection in the given line. Again,
under the mapping w = az + b this line is taken to
w − b
w − b
=
⇔ |w − b − aα| = |w − b − aβ|
−
α
−
β
a
a
|a|
|a|
⇔ |w − (b + aα)| = |w − (b + aβ)|
88
COMPLEX NUMBERS AND FUNCTIONS
That is, the image of the line that is the perpendicular bisector of the line segment between
α and β is the perpendicular bisector of line segment between b + aα and b + aβ.
These two parts together show that w = az + b maps circles to circles and straight lines
to straight lines.
We next want to consider the mapping w = z −1 , which is defined for all z 6= 0. Before
this, we return to the equation of a circle. If α = a1 + ia2 , β = b1 + ib2 ∈ C, and t ∈ R such
that 0 < t < 1 or t > 1, then some tedious algebra shows that
|z − α| = t|z − β|
t2 b1 − a1 2 t2 b2 − a2 2 t 2 + y− 2
= 2
(a1 − b1 )2 + (a2 − b2 )2 .
⇔
x− 2
t −1
t −1
t −1
That is, the equation |z − α| = t|z − β| corresponds to a circle with centre and radius
1/2
t2 b 1 − a 1
t2 b 2 − a 2
t +
i
and 2
(a1 − b1 )2 + (a2 − b2 )2
t2 − 1
t2 − 1
|t − 1|
respectively.
So now consider the image of the circle |z − α| = r under w = z −1 . If α = 0, i.e. the centre
is the origin, then this becomes
1
1
1
= r ⇔ |w| = ,
=
w
|w|
r
another circle centred on the origin. Otherwise we have
|1 − αw|
1
1
= r ⇔ |α| − w = r|w|
− α =
w
|w|
α
which is a line if |α| = r, otherwise it is a circle by the above calculation, where t = r/|α|.
On the other hand consider any straight line. This can always be written as |z−α| = |z−β|,
which is then transformed to
1
1
|1 − αw|
|1 − βw|
=
⇔ |1 − αw| = |1 − βw|.
− α = − β ⇔
w
w
|w|
|w|
But α and β can always be chosen so that neither is 0 (why?), hence the final equality is
equivalent to
1 |β| 1 w − =
w − ,
α
|α|
β
which is a line if |α| = |β|, and a circle otherwise.
89
Complex-valued functions
The preceding calculations can be summed up in the following:
az + b
for complex numbers a, b, c, d ∈ C
cz + d
such that ad − bc 6= 0 is called a Möbius transformation, and maps circles to circles or lines,
and lines to circles or lines.
Theorem 5.5. Any transformation of the form w =
Proof. First note that if c = 0, hence d 6= 0, then w = (a/d)z + b/d, which is a transformation
we have already considered. So if c 6= 0, then
f (z) =
1 a(z + d/c) + (b − ad/c)
a b − ad/c
×
= +
,
c
z + d/c
c
cz + d
Note that if we did not assume ad − bc 6= 0 then this would be a constant map, which would
map all points in the z-plane to a/c.
But now we can write f (z) = f3 f2 f1 (z) where
f1 (z) = cz + d,
f2 (z) =
1
a ad and f3 (z) = + b −
z,
z
c
c
Each of the maps f1 , f2 and f3 maps lines or circles to lines or circles, so doing all three, one
after the other, will have the same effect.
Exercise 5.6 (A03 7(a)). Find the image of the circle |z − 1| = 1 under each of the mappings
(i) w = 2z + 3 (ii) w = 1/z
Solution.
90
COMPLEX NUMBERS AND FUNCTIONS
Exercise 5.7 (S03 7(a)). Find the image of the line Re z = 1 under the mappings (i) w = z 2
(ii) w = 1/z
Solution.
Exercise 5.8. Find the image of the sets {z : Re z = 0} and {z : Re z > 0 and Im z > 0}
under the map w = z 2 .
Solution.
91
Complex-valued functions
Example 5.9 (S05 5(a)). Sketch the following sets of points in the complex plane:
A = {z : |z − 3| = |z − 1|},
B = {z : 1 < |z| < 2, π2 < arg z <
Find the image of A under the transformation w =
transformation w = z 3 . Sketch these images.
2π
3 }
1
and the image of B under the
z−1
Solution. {z : |z − 3| = |z − 1|} consists of points equidistant from 3 and 1, i.e. the line
Re z = 2.
π
2π
{z : 1 < |z| < 2, π2 < arg z < 2π
3 } is the intersection of the sector {z : 2 < arg z < 3 }
with the annulus {z : 1 < |z| < 2}.
92
COMPLEX NUMBERS AND FUNCTIONS
A
B
θ
2
1
1
2
3
θ=
2π
3
1+w
1
1
⇔ (z − 1)w = 1 ⇔ z =
= + 1. Thus the image of A is
z−1
w
w
1 + 1 − 3 = 1 + 1 − 1 ⇔ |1 − 2w| = 1 ⇔ 2 1 − w = 1 ⇔ w − 1 = 1
w
w
|w|
|w|
2
2 2
Now w =
which is the circle with centre 12 and radius 12 .
For the image of B note that if w = z 3 then |w| = |z 3 | = |z|3 and arg w = arg z 3 = 3 arg z.
Hence
1 < |z| < 2
π
2π
< arg z <
2
3
13 < |w| < 23 , i.e. 1 < |w| < 8, and
3π
< arg w < 2π.
2
⇒
⇒
1
2
1
8
1
Image of B
Image of A
Example 5.10. In each case determine geometrically the set of points that satisfy the given
conditions:
(i)
|2z − 6 + 2i| = 8
(ii) |z + i| < |z − 1|
Find the image of the set in (i) under the map w = iz + 5.
Solution. (i) |2z − 6 + 2i| = |2(z − 3 + i)| = 2|z − 3 + i| = 8 ⇒ |z − (3 − i)| = 4, so z satisfies
this condition if and only if it is on the circle with centre 3 − i and radius 4.
(ii) |z + i| < |z − 1| if z is closer to −i than to 1.
Note: |z + i| = |z − 1| if z is equidistant from −i and 1, i.e. on the line y = −x, so
|z + i| < |z − 1| if z is below the line y = −x.
w−5
If w = iz + 5 then z =
= −iw + 5i, and so if |z − 3 + i| = 4 then
i
4 = | − iw + 5i − 3 + i| = | − i(w − 6 − 3i)| ⇒ |w − (6 + 3i)| = 4
Thus the circle from (i) is mapped to the circle with centre 6 + 3i and radius 4.
93
Exercises
1
|z + i| < |z − 1|
−i
|z + i| = |z − 1|
5.4
Exercises
1. Evaluate each of the following expressions, giving your answer in the form x + iy for real
numbers x and y:
2
(−4 − 5i)(8 − 4i)
1
3 + 2i
(ii)
(iii)
(iv)
(i) (2 + 4i)(6 − 31)
i
−1 + i
6 + 2i
1
(v) (3 − 8i)(2i)(3 + 2i)
(vi) i3 − 4i2 + 2
(vii) (2 − i)3
(viii) i7 + 7
i
2.
(a) In each case determine the modulus and argument of the given complex number:
(i) 1 + 4i
(ii) − 3 − 6i
(iii) − 14i
(iv) 3 + 9i
(b) In each case write the number z in the form x + iy:
(i) |z| = 3, arg z =
π
4
(ii) |z| = 14, arg z =
7π
6
(iii) |z| = 7, arg z =
8π
3
3. Let z = r(cos θ + i sin θ) and w = s(cos ϕ + i sin ϕ) be two complex numbers given in polar
form. Use the fact that 1/w = w/(ww) to show the following:
z r
z
1
1
= (cos ϕ − i sin ϕ), =
and arg
=θ−ϕ
w
s
w
s
w
4. In each case determine geometrically the set of points that satisfy given conditions:
(i) |z − 8 + 4i| = 9
(iv) |z − i| < |z − 1|
(ii) |z| = |z − i|
(v) z = |z|eiθ , π/4 < θ ≤ 3π/4
(iii) |z|2 + Im z = 16
(vi) |z − 2| > 3 and |z| < 2
Find the image of (i) and (ii) under the map w = (−1 + i)z + (3 + 2i), and the image of (ii)
under the maps w = iz 2 , w = 1/z and w = (z − i)/(z + 2).
5.5
Continuity; sequences and series
The definition for continuity of functions f : C → C, and for convergence of sequences and
series made up of complex numbers look entirely analogous to those for their real-valued
counterparts. However, some care needs to be taken when applying these definitions. For
example, a function f : C → C is continuous at z = a if lim f (z) = f (a), that is, if the value
z→a
of f (z) gets close to f (a) as z gets close to a. Since we measure the distance between points z
and w in the plane in terms of the number |z − w|, this means that we need |f (z) − f (a)| → 0
94
COMPLEX NUMBERS AND FUNCTIONS
as |z − a| → 0. These limits here are concerned with real-valued quantities, so we can make
use of earlier (Section A) results to help calculate them.
The subtlety in the complex case is that there are many different ways for us to make
z → a. For example, writing a = α + iβ, we could take z = α + h + iβ for h > 0, and let
h → 0, or we could take z = α + i(β + h) for h < 0, and let h → 0, or . . . The important
thing to note is that the definition allows z to approach a from all directions in the plane.
For example, consider the function f (z) = z 2 . Then at any point z = a we have
|f (z) − f (a)| = |z 2 − a2 | = |(z − a)(z + a)| = |z − a| × |z + a|.
Letting z → a is the same thing as letting |z − a| → 0. Also, by the triangle inequality,
|z| = |(z − w) + w| 6 |z − w| + |w| and |w| 6 |w − z| + |z| = |−(z − w)| + |z| = |z − w| + |z|
for all z, w ∈ C, from which we get |z| − |w| 6 |z − w|. It follows that
0 6 |z + a| − |a + a| 6 |(z + a) − (a + a)| = |z − a| → 0,
so by the Squeeze Theorem |z + a| → |a + a|, and applying the limit laws we get
|z 2 − a2 | → 0 × |2a| = 0.
That is, z 2 → a2 , hence the function f (z) = z 2 is continuous at a. Similar arguments, and
some induction show that all polynomials are continuous functions at all points in the plane.
Re z Im z
, defined for each z 6= 0. Show that
|z|2
there is no α ∈ C such that defining f (0) = α will make the function continuous at the origin.
Exercise 5.11. Consider the function f (z) =
Solution.
We say that a sequence (an )∞
n=1 of complex numbers is convergent to some limit L if an
gets closer and closer to L as n → ∞, which amounts to saying that |an − L| → 0 as n → ∞,
or, equivalently, that
Re an → Re L and Im an → Im L as n → ∞.
If the sequence is not convergent then it is divergent.
95
Continuity; sequences and series
n > 1 then the series
P∞Complex series can be treated similarly: if an ∈ C for each
Pinteger
N
a
is
convergent
if
the
sequence
of
partial
sums
S
=
a
is
convergent. Again,
n
N
n
n=1
n=1
this is equivalent to requiring that the real series
Re
N
X
n=1
N
X
an =
Re an
and
n=1
N
N
X
X
Im
an =
Im an
n=1
n=1
P∞
both be convergent.
More importantly, a series n=1 an is absolutely convergent if the
P∞
sequence of n=1 |an | of nonnegative real numbers is convergent, and this is a series to which
we can apply all the tests previously discussed (Comparison Test, Ratio Test, etc.). This is
useful since every absolutely convergent sequence is necessarily convergent.
2 + in ∞
Exercise 5.12. Determine whether or not the sequences
and (in )∞
n=1 converge.
1 + 3n n=1
Solution.
Exercise 5.13. For which values of z does the series
Solution.
96
∞
X
(z + 1)n
converge absolutely?
2n
n=0
COMPLEX NUMBERS AND FUNCTIONS
Any a ∈ C and sequence (bn )∞
n=1 of complex numbers determines a power series:
∞
X
n=1
bn (z − a)n .
Combining the fact that absolute convergence implies convergence of a series of complex numbers, together with an application of the Ratio Test, shows
that there is some number 0 6 R 6 ∞ such that the above
series converges for all z ∈ C that satisfy |z − a| < R, and
diverges if |z − a| > R. That is, the series is convergent
R
inside the disc of radius R and centre a, and divergent outa
side. On the boundary we have to apply further tests. The
function defined by the series is continuous within the disc,
and moreover it is permissible to differentiate a power series term-by-term within its radius of convergence (as soon
as we have defined differentiation for such functions. . . )
5.6
Exponential and trigonometric functions
Recall that the exponential, sine and cosine functions can be written in terms of their Maclaurin Series:
ex = exp x =
∞
X
xn
,
n!
n=0
sin x =
∞
X
(−1)n x2n+1
,
(2n + 1)!
n=0
cos x =
∞
X
(−1)n x2n
,
(2n)!
n=0
where x is a real variable above. These were shown to converge for all x ∈ R by calculating the
radius of convergence using the Ratio Test. In turns out that the calculation
valid for
P∞ is equallyP
∞
the analogous complex power series. For example, consider the series n=0 z n /n! = n=0 an
where an = z n /n!. We have
|an+1 | z n+1 n! |z|n × |z| × n!
|z|
=
×
=
=
→ 0 as n → ∞.
n
n
|an |
(n + 1)!
z
(n + 1) × n! × |z|
n+1
Thus, by the Ratio Test, the series is absolutely convergent and hence convergent for all
z ∈ C. Consequently we can define ez , and similarly sin z and cos z, by setting:
ez = exp z =
∞
X
zn
,
n!
n=0
sin z =
∞
X
(−1)n z 2n+1
,
(2n + 1)!
n=0
cos z =
∞
X
(−1)n z 2n
.
(2n)!
n=0
That is, we use the power series expansions to extend the domain of definition of these
functions to all of the complex plane C, noting that if z = x, i.e. if z has no imaginary part,
then ez as defined above coincides with the usual value for ex , etc.
One can then check from these definitions of complex exponentials and trigonometric
functions that the following familiar formulae hold:
ez+w = ez ew ,
(i.e. exp(z + w) = exp z exp w)
sin(z + w) = sin z cos w + cos z sin w,
cos(z + w) = cos z cos w − sin z sin w.
In particular we see from this that
exp(z) exp(−z) = exp(z − z) = exp 0 = 1,
97
Exponential and trigonometric functions
and so exp z 6= 0 for all z; moreover exp(−z) = 1/ exp z. Also, sin(−z) = − sin z since the
series for sin z involves only odd powers of z, and cos(−z) = cos z since the series for cos z
involves only even powers of z. For example
cos(−z) =
∞
∞
∞
X
X
X
(−1)n (−z)2n
(−1)n (−1)2n z 2n
(−1)n z 2n
=
=
= cos z,
(2n)!
(2n)!
(2n)!
n=0
n=0
n=0
since (−1)2n = [(−1)2 ]n = 1n = 1.
To see how these functions can be expressed in terms of well-known real-valued functions
of a real variable, first consider replacing z by iz in the definition of ez :
exp(iz) =
∞ n n
∞
X
X
i z
(iz)n
=
n!
n!
n=0
n=0
z2
z3
z4
z5 z6
z7
= 1 + iz −
−i +
+i −
− i + ···
2!
3!
4!
5!
6!
7!
h
i
h
i
z2
z4
z6
z3
z5
z7
= 1−
+
−
+ ··· + i z −
+
−
+ ···
2!
4!
6!
3!
5!
7!
= cos z + i sin z,
(†)
since i2 = −1, i3 = −i, i4 = 1, i5 = i4 .i = i, i6 = −1, etc. In particular setting z = θ ∈ R
above gives a useful representation of the polar form of z ∈ C:
z = r(cos θ + i sin θ) = reiθ .
This in turn leads to quick proofs of how arguments and moduli change on multiplication and
division, for example if z = reiθ and w = seiϕ then
z
z
z
reiθ
r
|z|
= iϕ = ei(θ−ϕ) ⇒ =
and arg
= arg z − arg w.
w
se
s
w
|w|
w
Also note that the power law for the exponential function and (†) give
exp(x + iy) = exp x exp(iy) = ex (cos y + i sin y),
which is an alternative way to define ez , as used in the other texts. For similar formulae for
cos z and sin z note that from (†) we have
eiz = cos z + i sin z ⇒ e−iz = ei(−z) = cos(−z) + i sin(−z) = cos z − i sin z
⇒ cos z = 21 (eiz + e−iz ),
= 12 (e−y+ix + ey−ix )
=
=
−y
1
(cos x + i sin x) + ey (cos x − i sin x)
2 e
−y
1 y
) cos x − 2i (ey − e−y ) sin x
2 (e + e
Thus cos z = cos(x + iy) can be expressed in terms of the usual trigonometric functions of x,
together with the hyperbolic functions of y. A similar calculation for sin z yields:
cos z = cos x cosh y − i sin x sinh y,
sin z = sin x cosh y + i cos x sinh y
where recall that cosh y = 12 (ey + e−y ) and sinh y = 21 (ey − e−y ). In particular, taking a
purely imaginary number as the argument in the above gives
cos(iy) = cosh y,
sin(iy) = i sinh y
98
COMPLEX NUMBERS AND FUNCTIONS
Our earlier identities about cos(z + w) etc. made it look like complex trigonometric functions behave in essentially the same way as their real counterparts. However the above
identities show that this is not always the case. For example:
cos(iy) = cosh y = 21 (ey + e−y ) → +∞ as y → ±∞.
In particular, it is not true that | cos z| 6 1. Moreover ez can take any value in the complex
plane apart from 0, so is not restricted to just the positive real numbers as is ex , x ∈ R. For
example
√
√ √
exp ln( 2 ) + i π4 = exp ln( 2 ) cos π4 + i sin π4 = 2 × √12 + i √12 = 1 + i.
Exercise 5.14 (A03 7(b)). Define ez and cos z for z = x + iy. Write cos(2 − 3i) in the form
a + ib for a, b real numbers.
Solution.
Exercise 5.15. Show that sin(z) = sin z, and hence that | sin z|2 = sin2 x + sinh2 y. Use this
to write e4+i / sin(2 − 5i) in the form a + ib for a, b ∈ R.
Solution.
Example 5.16 (S05 5(b)). Write e2+3i and cos(4 − i) sin(3 + 5i) in the form x + iy for real
numbers x and y.
99
De Moivre’s Theorem; nth roots
Solution. We have
e2+3i = e2 cos 3 + ie2 sin 3
and
cos(4 − i) sin(3 + 5i) = cos 4 cosh 1 + i sin 4 sinh 1 sin 3 cosh 5 + i cos 3 sinh 5
= cos 4 cosh 1 sin 3 cosh 5 − sin 4 sinh 1 cos 3 sinh 5
+ i cos 4 cosh 1 cos 3 sinh 5 + sin 4 sinh 1 sin 3 cosh 5
5.7
De Moivre’s Theorem; nth roots
Let z ∈ C, z 6= 0, hence we can write z = reiθ for some r > 0 and θ ∈ R. Then for any integer
n > 1 we have
z n = (reiθ )n = rn (eiθ )n = rn einθ .
Moreover, if m < 0 is an integer then we define z m = z −(−m) = (z −m )−1 = 1/z −m, and it
follows that the above equation holds for all integers m. So in particular if we take |z| = 1,
i.e. r = 1, then the above becomes
(cos θ + i sin θ)m = cos mθ + i sin mθ.
This identity is known as De Moivre’s Theorem and can be used to prove various trigonometric identities, as well as calculate powers and roots of complex numbers.
For example, given a complex number z = reiθ 6= 0 and an integer n > 2, which w ∈ C
satisfy wn = z? Any solution of this equation is an nth root of z. For the case n = 2 we
would be finding square roots. To solve this, let w = seiϕ , then
wn = z ⇔ (seiϕ )n = sn einϕ = reiθ .
√
For these to be equal we need the moduli to agree, i.e. sn = r, hence s = n r = r1/n , the
usual positive nth root of the positive number r, and the arguments must also agree — up
to a multiple of 2π, since we could have nϕ = θ, or nϕ = θ + 2π, or nϕ = θ + 4π, or. . . If we
deal with the principle arguments of z and w then −π < θ 6 π and −π < ϕ 6 π, but for an
nth root this will still produce a total of n possibilities for ϕ, each equally spaced from the
next by 2π/n radians.
Such behaviour is already well-known for square roots of positive real numbers. For
example 9 = (±3)2 , where
ω
9 = 9ei×0 ,
3 = 3ei×0 and − 3 = 3ei×π = 3ei×2π/2 .
Similarly, since 1 = 1ei×0 , it follows that 1 has three cube
roots which are
ω = e2πi/3 ,
ω 2 = e4πi/3 = e−2πi/3 and 1 = ω 3 = e6πi/3 = e2πi .
1
ω2
Exercise 5.17. Apply De Moivre’s Theorem with n = 3 to derive expressions for cos 3θ and
sin 3θ in terms of cos θ and sin θ.
100
COMPLEX NUMBERS AND FUNCTIONS
Solution.
Exercise 5.18 (A04 5(a)). By converting to polar form find:
(i) (−1 + i)6
(ii)
√
(iii) (2 + 2 3i)5
√
5
−i
Solution.
101
Exercises
5.8
Exercises
1. Which of the following complex sequences converge? [Hint: considering real and imaginary
parts of an , or considering |an | maybe be useful]
n ∞
∞
2
∞
i
(−1)n n
n + in
(i)
(ii)
(iii)
(iv) (e(1+i)n )∞
n=1
n n=1
n + i n=1
n2 + i n=1
2. Find all of the solutions of the following equations:
(i) cos z = 0
(iii) ez = i
(ii) sin z = cos z
3. Find the following powers and roots and plot them on an Argand diagram:
(i) (−1 +
√
7
√
(iii)
i
4
3i)
(ii) (1 − i)
q
√
4
(v)
81 + 81 3i
√
(iv) 3 −8i
4. In each case find the radius of convergence of the given power series:
(i)
5.9
∞
X
(n2 + 1)(z + 1)n
n!
n=0
(ii)
∞
X
(n − 1)7n z n
3n + 5
n=0
(iii)
∞
X
i(z − i)n
in + 1
n=0
Differentiable and analytic functions
As with continuity, the definition of a differentiable function f : C → C is done by analogy
with the real case. Indeed, the function f is differentiable at z0 ∈ C if
lim
w→0
f (z0 + w) − f (z0 )
exists,
w
in which case it is denoted f ′ (z0 ). One immediate consequence of this definition is that the
product, quotient and chain rules remain valid for derivatives of complex functions.
However, as with continuity, the subtlety here is that the limit is taken over all w ∈ C
approaching 0 from any possible direction. This is distinct from partial derivatives when we
were concerned with functions g : R2 → R, and looked at changes of the form g(x + h, y) −
g(x, y) or g(x, y + h) − g(x, y) — that is, varying either one coordinate or the other, but only
making changes parallel to the coordinate axes.
There is a very important connection with partial derivatives, which comes by looking at
the real and imaginary parts of a differentiable function. Given any function f : C → C we
can define functions u : R2 → R and v : R2 → R by writing z = x + iy, and then setting
u(x, y) = Re f (z) = Re f (x + iy),
v(x, y) = Im f (z) = Im f (x + iy).
If we also know that f is differentiable at the point z0 = a + ib then we can calculate the
derivative in a number of different ways, the most obvious being to either vary the real part
while leaving the imaginary part fixed, or vice versa. For the first case we are making the
small change w = h + i0 = h with h ∈ R, h 6= 0, and so
f (z0 + w) − f (z0 )
f (a + ib + h) − f (a + ib)
= lim
h→0
w
h
[u(a + h, b) + iv(a + h, b)] − [u(a, b) + iv(a, b)]
= lim
h→0
h
u(a + h, b) − u(a, b)
v(a + h, b) − v(a, b)
= lim
+i×
h→0
h
h
∂u
∂v
=
(a, b) + i (a, b).
∂x
∂x
f ′ (z0 ) = lim
w→0
102
COMPLEX NUMBERS AND FUNCTIONS
For the second case w = 0 + ik = ik for k ∈ R, k 6= 0, and so now
f (z0 + w) − f (z0 )
f (a + ib + ik) − f (a + ib)
= lim
k→0
w
ik
[u(a, b + k) + iv(a, b + k)] − [u(a, b) + iv(a, b)]
= lim
k→0
ik
1 u(a, b + k) − u(a, b)
1 v(a, b + k) − v(a, b)
×
+i× ×
= lim
k→0
i
k
i
k
∂u
∂v
= −i (a, b) +
(a, b).
∂y
∂y
f ′ (z0 ) = lim
w→0
But both of these calculations must yield the same result, so equating the real and imaginary
parts shows that if f (z) is differentiable at z0 = a + ib then
∂v
∂u
∂v
∂u
=
and
=− .
∂x
∂y
∂y
∂x
The equations above are known as the Cauchy-Riemann equations, and are necessarily satisfied by any differentiable function f : C → C.
Example 5.19. Show that the real and imaginary parts of the function f (z) = zz 2 satisfy
the Cauchy-Riemann equations only at the origin.
Solution. f (z) = f (x+iy) = (x−iy)(x+iy)2 = (x−iy)(x2 −y 2 +2ixy) = x3 +xy 2 +i(y 3 +x2 y)
and so the real and imaginary parts of f are
u(x, y) = x3 + xy 2 and v(x, y) = y 3 + x2 y
∂u
∂u
∂v
∂v
⇒
= 3x2 + y 2 ,
= 2xy,
= 2xy and
= 3y 2 + x2 .
∂x
∂y
∂x
∂y
∂u
∂v
=−
then 2xy = −2xy ⇒ xy = 0 ⇒ x = 0 or y = 0. On the other hand if
∂y
∂x
∂u
∂v
=
then 3x2 + y 2 = 3y 2 + x2 ⇒ x2 = y 2 ⇒ x = ±y. So if both of these equations
∂x
∂y
hold then both x and y must be zero, i.e. the Cauchy-Riemann equations hold only at the
origin.
So if
A stronger condition on a function f : C → C than that of being differentiable at the
point z0 is if it is analytic at z0 , which means that not only is it differentiable at z0 , but that
it is also differentiable at every point in some disc of some positive radius r > 0 with centre
z0 . That is, it also must be differentiable at all points close to z0 as well as at z0 . A function
is called entire if it is differentiable at all points in the complex plane.
We have shown that the Cauchy-Riemann equations are a necessary condition for a function to be differentiable, but they turn out not to be a sufficient condition — that is, there
are functions that satisfy these equations which are not differentiable. However if we add one
extra technical condition then everything works well:
Theorem 5.20. (i) If a function f : C → C satisfies the Cauchy-Riemann equations in the
disc D = {z : |z − z0 | < r}, and if the four partial derivatives are continuous on D, then f is
analytic at every point in D.
(ii) If f : C → C is analytic in the disc D = {z : |z − z0 | < r} then it is infinitely
differentiable at each point in D, and
f (z) =
∞
X
f (n) (z0 )
(z − z0 )n ,
n!
n=0
103
z∈D
Differentiable and analytic functions
where f (n) denotes the nth derivative of f .
(iii) If the power series
∞
X
bn (z − z0 )n .
n=1
has radius of convergence r, then f is analytic in the disc D = {z : |z − z0 | < r}. Hence it is
infinitely differentiable in D, and
f ′ (z) =
∞
X
n=1
nbn (z − z0 )n−1 .
In particular, differentiating m times and setting z = z0 gives f (m) (z0 ) = m! bm .
Since the exponential and trigonometric functions were defined in terms of power series
with infinite radius of convergence, it follows that these functions are entire, and that we can
differentiate them term-by-term. It is then not hard to check that
d z
e = ez ,
dz
d
sin z = cos z,
dz
d
cos z = − sin z.
dz
Exercise 5.21. Let u(x, y) = Re f (z) and v(x, y) = Im f (z) for f (z) = z 2 + iz, where
z = x + iy. Show that u and v satisfy the Cauchy-Riemann equations everywhere.
Solution.
Exercise 5.22. Let f (z) = |z|2 , and let u and v denote the real and imaginary parts of f .
Show that u and v only satisfy the Cauchy-Riemann equations at the origin, and that the
function f is differentiable there.
Solution.
104
COMPLEX NUMBERS AND FUNCTIONS
Exercise 5.23 (S03 7(b)). Simplify u(x, y) = Re zez and v(x, y) = Im zez , for z = x + iy,
∂u
∂v
and show that u and v satisfy
=
at all points (x, y).
∂x
∂y
Solution.
Exercise 5.24. Show that the function f (z) = z is not differentiable anywhere.
Solution.
5.10
Harmonic functions
As a final note, suppose that f : C → C is analytic in the disc D = {z : |z − z0 | < r}.
Its real and imaginary parts satisfy the Cauchy-Riemann equations, and since f is infinitely
differentiable it follows that u and v have partial derivatives of all orders, and that the mixed
partial derivatives are equal. This in turn leads to the following observation:
⇒
∂u
∂v
=
and
∂x
∂y
∂2u ∂2u
∂ ∂v + 2 =
+
2
∂x
∂y
∂x ∂y
⇒
∂u
∂v
=−
∂y
∂x
∂ ∂v ∂2v
∂2v
−
=
−
∂y
∂x
∂x∂y ∂y∂x
∂2u ∂2u
+ 2 = 0.
∂x2
∂y
That is, u satisfies Laplace’s equation, as does the imaginary part v of f , as can be shown
by a similar calculation. Alternatively, we say that u and v are harmonic functions.
Such functions play an extremely important role in applied mathematical problems, for
example within the study of fluid mechanics which is an area of mathematics that draws
heavily on complex analytic methods. Not only do harmonic functions appear, but, for
example, the calculations involved in determining the lift generated by air flowing round the
wing of an aircraft can be greatly simplified by making an appropriate transformation of the
complex plane, i.e. some map of the form w = f (z) to turn the wing profile into a circle.
105
Harmonic functions
When doing such transformations we usually further require them to be conformal at all
points off of the wing’s surface: a map is conformal at a point z = z0 if it preserves angles
between lines passing through z0 when looking at their images in w-plane. This property is
guaranteed by the simple condition that f ′ (z0 ) 6= 0, which is true of the Möbius transformation
az + b
w=
except when z = −d/c (assuming c 6= 0).
cz + d
Exercise 5.25 (A03 7(c)). Simplify u(x, y) = Re(z 2 − iz) and show that it satisfies the
∂2u ∂2u
equation
+ 2 = 0.
∂x2
∂y
Solution.
2
2
Exercise 5.26 (A04 5(b)). Let u(x, y) = Re e−z and v(x, y) = Im e−z for z = x + iy. Show
∂u
∂v
∂ 2 u ∂ 2u
that
=
and
+ 2 = 0 at all points (x, y).
∂x
∂y
∂x2
∂y
Solution.
106
COMPLEX NUMBERS AND FUNCTIONS
Example 5.27 (S05 5(c)). Let z = x + iy and simplify u(x, y) = Re z sin z. Show that u
satisfies the equation
∂ 2 u ∂ 2u
+ 2 = 0.
∂x2
∂y
Solution. If z = x + iy then
z sin z = (x + iy)(sin x cosh y + i cos x sinh y)
= (x sin x cosh y − y cos x sinh y) + i(x cos x sinh y + y sin x cosh y)
and so u(x, y) = Re z sin z = x sin x cosh y − y cos x sinh y. Thus
∂u
∂x
∂2u
∂x2
∂u
∂y
∂2u
∂y 2
and so
= sin x cosh y + x cos x cosh y + y sin x sinh y
= 2 cos x cosh y − x sin x cosh y + y cos x sinh y
= x sin x sinh y − cos x sinh y − y cos x cosh y
= x sin x cosh y − 2 cos x cosh y − y cos x sinh y
∂ 2 u ∂ 2u
+ 2 = 0.
∂x2
∂y
Example 5.28. Let u(x, y) and v(x, y) be the real-valued functions defined by
u(x, y) = Re(iz 2 + cos z),
where z = x + iy. Show that
equation
∂2v
∂2v
+
= 0.
∂x2
∂y 2
v(x, y) = Im(iz 2 + cos z)
∂u
∂v
=
holds at all points (x, y), and that v satisfies the
∂x
∂y
Solution. Now iz 2 + cos z = i(x2 − y 2 + 2ixy) + cos x cosh y − i sin x sinh y, and so
u = −2xy + cos x cosh y,
v = x2 − y 2 − sin x sinh y.
∂u
∂v
= −2y − sin x cosh y and
= −2y − sin x cosh y, hence these partial derivatives
∂x
∂y
are equal.
∂v
∂2v
∂2v
Also,
= 2x − cos x sinh y ⇒
= 2 + sin x sinh y, while
= −2 − sin x sinh y,
2
∂x
∂x
∂y 2
∂2v
∂2v
so that
+ 2 = 0.
2
∂x
∂y
Thus
107
Exercises
5.11
Exercises
1. In each case, write the function w = f (z) as w = u(x, y) + iv(x, y), where z = x + iy.
∂u
∂v
∂u
∂v
∂2u ∂2u
Then verify that
=
, that
= − , and that
+ 2 = 0:
∂x
∂y
∂x
∂y
∂x2
∂y
(i) w = z 3
(v) w = iz 2 − ez
2
(ii) w = sin z + e2z
(iii) w = cos z 2
(vi) w = 3z 2 − iz 4
(vii) w = z + i + ez
(iv) w = zez
(viii) w = sin z cos z
2. In each case show that the given function is not analytic at any point in C by showing
that the Cauchy-Riemann equations do not hold at most points in C:
(i) f (z) = Re z
(ii) f (z) = |z|2
(iii) f (z) = iz + |z|
By reverting to the definition f ′ (z) = limh→0 h−1 f (z + h) − f (z) , determine where these
functions are differentiable.
108