Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
2.1 Green’s functions
The acoustic Green’s function in 3D is the impulsive point source response of an acoustic medium.
It satisfies the 3-D Helmholtz equation in the frequency domain for an arbitrary and linear acoustic
medium with constant density,
where k = ω/v(g), the differentiation is with respect to the coordinates of g, and
±(s−g) = ±(xs − xg)±(ys − yg)±(zs − zg).
Two solutions, one for an outgoing causal Green’s function 𝐺 𝐠│𝐬
and the other for an incoming acausal Green’s function 𝐺 ∗ 𝐠│𝐬 ;
𝐺 𝐠│𝐬 =
1 𝑒 𝑖𝑘𝑟
4𝜋 𝑟
,
−𝑖𝑘𝑟
1
𝑒
𝐺 ∗ 𝐠│𝐬 =
4𝜋 𝑟
Note, 𝐺 𝐠│𝐬 =𝐺 𝐬│𝐠
Reciprocity!
Scalar wave equation,
𝛻2∅
−
1 𝜕2 ∅
=0
𝑐 2 𝜕𝑡 2
if no source (homogeneous eq.)
scalar potential, ∅ 𝑟, 𝑡 = Re (𝑒 −𝑖𝜔𝑡 ψ(𝑟))
ψ(𝑟): some complex valued scalar function
𝜕2 ∅ 𝑟,𝑡
𝜕𝑡 2
= −𝜔2 ψ(𝑟)
= −𝑐 2 𝑘 2 ψ(𝑟)
𝛻 2 ψ 𝑟 + 𝑘 2 ψ 𝑟 = 0 : Helmholtz equation
2.2 Reciprocity equation of convolution type
for all x inside the integration volume.
Using the product rule for differentiation (i.e., d(fg) = gdf + fdg), we get:
• The integrands in this equation are a product of a monopole source (i.e., point source Green’s function G(x|A))
and a dipole (i.e., dG/dn ≈ [G(x + dn|A) − G(x|A)]/|dn|) source.
the spectral phases are added
• Adding phases is the same as adding travel-times, suggesting that the monopole-dipole product predicts
events with longer traveltimes and raypaths.
• If the entire integration surface is at infinity and v(x) = v0(x), i.e. G0(x|A) = G(x|A),
then the integral’s contribution is zero by the Sommerfeld outgoing radiation condition.
the reciprocity property of Green’s functions for an arbitrary velocity distribution:
which is also true if the functions are conjugated.
Born forward modeling
• A single scattering approximation known as Born forward modeling is valid for weak scatterers embedded in
a smooth background velocity v0 with wavenumber k0 = ω/v0.
• Decomposing the slowness field s(x) = 1/v(x) into a sum of background s0(x) = 1/v0 (x) and slightly perturbed
δs(x) slowness fields such that s(x) = s0 (x)+ δs(x),
? ? 𝑘 2 = 𝜔2 𝑠 2 = 𝜔2 (𝑠0 + 𝛿𝑠)2 = 𝜔2 𝑠02 + 2𝑠0 𝛿𝑠 + 𝛿𝑠
2
≈ 𝜔2 𝑠02 + 2𝜔2 𝑠0 𝛿𝑠 = 𝑘02 + 2𝜔2 𝑠0 𝛿𝑠 !!
• Multiplying it by the background Green’s function G0(B|x) and using the product rule for differentiation,
• Replacing the terms in the above { } brackets by −δ(x − B) gives
• The final expression for the field G(B|A) is given by integrating the above equation over the entire volume
enclosed by a sphere at infinity:
total field
scattered field
background field
• Lippmann-Schwinger equation
• Born forward modeling equation (for weak scatterers, G(x|A)≈ G0(x|A) )
2.3 Reciprocity equation of correlation type
Useful Properties
1. Inverse Fourier transforming 2iIm[G(B|A)] = G(B|A) − G(B|A), the causal Green’s function can be recovered by
evaluating g(B, t|A, 0) − g(B,−t|A, 0) for t ≥ 0.
2. The reciprocity-correlation equation is characterized by a product of unconjugated and conjugated Green’s
functions. The subtraction of phases is the same as subtracting traveltimes, suggesting that the monopole-dipole
product predicts events with shorter traveltimes and shorter raypaths.
3. If the medium is sufficiently heterogeneous, the correlation reciprocity integral at infinity vanishes due to
strong scattering in the medium.
4. If A is near the free surface and B is along a vertical well then the Green’s functions can be interpreted as
either VSP or SSP Green’s functions. The reciprocity equation of correlation type can be rewritten as
which is the SSP→VSP transform of the correlation type.
Far-field approximation
product of two monopoles
• Induced radiation from the scattering body in the far field is
where r is the distance between a point B within the scatterer region and the point x far from the
scatterer4 and m(A, μ) is a function of the angular coordinates only.
• The gradient terms in reciprocity equation of correlation type become in the far-field approximation
• The far-field expression is
where the integration along the boundary at infinity can be neglected for a sufficiently heterogeneous medium.
• The surface S0 is not always far enough from the points B and A to justify the far-field approximation, i.e.,
The obliquity factor 𝒏 ∙ 𝒓 sometimes is considered in
• But much of this noise gets canceled after migration and stacking of many shot gathers.
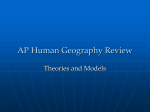
2.4 Stationary phase integration
where the integration is over the real line, φ(x) is real and a well-behaved phase function with at most one simple
stationary point, ω is the asymptotic frequency variable, and g(x) is a relatively slowly varying function.
If the exponential argument ωφ(x) is large and rapidly varying with x then eiωφ(x) is a rapidly oscillating function
with a total algebraic area of zero, the line integral goes to zero.
The real part of eiωφ(x) for a linear phase function
ωφ(x) = kx. Here, k = ω/v is a constant defined as the
instantaneous wavenumber d[ω φ(x)]/dx.
As ω gets large, the rule is that the oscillation rate k
increases and the algebraic area under the curve
mostly goes to zero.
An exception at a stationary point x* where the instantaneous wavenumber ωφ(x)′x=x* = 0.
The quadratic term in the Taylor series expansion of φ(x) about x*:
Substituting this equation into the previous equation
yields
This integral is recognized as the Fresnel integral;
Substituting this equation into the previous equation yields the asymptotic form
where
is an asymptotic coefficient.
Let the normalized direct wave G(x|B) = eiωτxB and the normalized reflected wave G(x|A) = eiωτAyox ,
2.5 Seismic migration
The goal in seismic imaging is to invert the seismic traces for an estimate of the reflectivity distribution.
The approximate inverse by applying the adjoint of the forward modeling operator is known as migration or
Born inversion. Simply put, seismic migration is the relocation of a trace’s reflection event back to its place of
origin, the reflector boundary.
Born modeling equation;
where D(g|s) represents the shot gather of scattered energy in the frequency domain for a source at s and a
geophone at g, and m(x) = 2s(x)δs(x) approximates the weighted reflectivity distribution.
D(g|s) d ; m(x) m ; the Born forward modeling operator
L;
The data function d is indexed according to the data coordinates for the source s and receiver g locations,
while the model vector m is indexed according to the reflectivity locations x in model space.
Approximated by the matrix-vector equation;
where di and mj represent, respectively, the components of the M×1 data vector d and the N×1 model vector m.
Generally, M >> N (overdetermined) and the residual components
≠ 0 for all values of i
(inconsistent). To minimize the sum of the squared errors (or the misfit function),
A perturbation with respect to the imaginary model parameter yields a similar set of M equations, which
combine to give the normal equations
where 𝐋𝐋 is an M×M matrix. The inverse to the normal equations is given by
If 𝐋𝐋 is diagonally dominant,
The denominator is a preconditioning term that corrects for the geometrical spreading effects.
Normalizing the diagonal components of 𝑳𝐋 to unity,
The subsurface reflectivity distribution can be estimated by applying the adjoint of the forward modeling
operator to the data.
By replacing d and m by their function representations, and plugging this into the previous formula,
Compared to the forward modeling equation which sums over the model-space variables x, the migration
integral sums over the data space variables s and g; it also includes the extra integration over ω.
The kernel
is the conjugate of the one in the forward modeling.
By replacing the Green’s functions by their asymptotic forms,
the diffraction stack formula is obtained.
2.6 Interferometric migration
In standard migration;
• D(g|s) represents the actual scattered data after the direct wave is muted.
• The Green’s functions G(x|s) and G(x|g) are computed by a model-based procedure such as ray tracing for
diffraction stack migration, or by an approximate finite-difference solution to the wave equation.
• The estimated velocity model always contains inaccuracies that lead to errors in the computed Green’s functions.
Such mistakes manifest themselves as defocused migration images.
In interferometric migration;
• The natural data are used to either fully or partly replace the Green’s functions, resulting in no need for the
velocity model and avoidance of defocusing errors.
• Another type is interferometric redatuming followed by a model-based migration of the redatumed traces
obtained by first interferometrically redatuming the raw data D(g|s) to a new recording datum closer to the target.