Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Resistive opto-isolator wikipedia , lookup
Electrical substation wikipedia , lookup
Distributed control system wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Resilient control systems wikipedia , lookup
Stray voltage wikipedia , lookup
Opto-isolator wikipedia , lookup
Control theory wikipedia , lookup
Alternating current wikipedia , lookup
Power inverter wikipedia , lookup
Buck converter wikipedia , lookup
Control system wikipedia , lookup
Voltage optimisation wikipedia , lookup
Mains electricity wikipedia , lookup
Rectiverter wikipedia , lookup
Power electronics wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Electric motor wikipedia , lookup
Distribution management system wikipedia , lookup
Dynamometer wikipedia , lookup
Electric machine wikipedia , lookup
Induction motor wikipedia , lookup
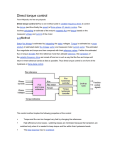
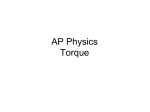
Performance Analysis of Direct Torque Control (DTC) for Synchronous Machine Permanent Magnet (PMSM) Badre Bossoufi, Mohammed Karim, Ahmed Lagrioui Badre Bossoufi, Silviu Ioniţă (Membre IEEE) Laboratory of Data processing, Imagery and Analyzes Numerical (LIIAN), Faculty of Sciences Dhar El Mahraz. Fez, Morocco [email protected], [email protected], [email protected] Center of Modeling and simulation of the systems, Faculty of Electronics, Communications and Computers, University of PITEŞTI PITEŞTI, Romania [email protected], [email protected] Abstract -- The Direct Torque Control (DTC) is a technique increasingly used to control the invertors for synchronous machines. The process is complex including the analog parameters and discrete events. This system can be seen as a hybrid dynamic system where the analog part is the Permanent Magnet Synchronous Machine (PMSM) and the discrete part is the voltage inverter. In this paper, we propose a particular model of the direct torque controller for a PMSM presenting the results of simulation for a certain machine. Keywords- Direct Torque Control (DTC), Permanent Magnet Synchronous Machine (PMSM). Elimination of the current controllers. Elimination of rotor position sensor. Inherent delays. II. MODELING OF THE PMSM: The motor considered in this paper is a revolving-field (interior) PMSM which consists of a three phase stator windings and a PM rotor. I. INTRODUCTION Permanent magnet synchronous motor drives (PMSM) offers many advantages over the induction motor, such as an improved overall efficiency, the effective use of reluctance torque, the smaller losses and the compact built size. Recently, many studies point out different solutions for the PMSM drive control providing good capabilities for the quick and precise torque response, and avoiding the inconveniences related on the complexity of field-oriented control (FOC) algorithms [1], [2], [3]. The DTC technique has been recognized as a viable and robust solution to achieve these requirements. In the existing literature, many algorithms have been suggested for the DTC control implementation [1], [4], [5], [6]. Basically, DTC manages the suitable voltage-vectors according to the magnetic field flux of the stator and to the difference between the real torque and the prescribed one, named reference. For the PMSM drive, the classical eight voltage-vector switching scheme seems to be suitable only for high speed operation of the motor while at low speed the six voltage-vector switching scheme, avoiding the two zero voltage-vectors, seems to be appropriate.. The voltage-vector strategy using switching table is widely approached by researchers and it is also a very common commercial technique, because it is very simple as the principle and very easy to be implemented respectively. The stator fluxes linkages are calculated from voltage and current models PMSM drive. The DTC is very attractive for designers because of certain features as follows: Simplicity of its structure. Figure 1. The basic scheme of the synchronous machine The voltage equations in a synchronous reference frame can be derived as follows [4]: u sd rs .isd usq rs .isq d sd . sq dt d sq dt . sd (1) (2) Where the direct and quadrate axis flux linkages are: sd Ld .isd f (3) sq Lq .isq (4) The electromagnetic torque of the motor can be evaluated as follows, Ce 3 p f .I q ( Ld Lq ).I d .I q 2 (5) The motor dynamics can be simply described by the equation (6). Ce Cr J . d f . dt (6) The symbols denote the parameters as follows: Ω - rotation's speed mechanical of the PMSM, - Rotation’s speed electric, p - Number of pairs of poles, J - Total moment of inertia about the shaft of the PMSM, f - Coefficient of viscous friction, Cr - Load torque, f - Flux produced by the permanent magnet, sd - d axis stator magnetic flux, sq - q axis stator magnetic flux, Ld - d axis stator leakage inductance, Lq - q axis stator leakage inductance, rs - Stator winding resistance, Ce - electromagnetic torque. III. DIRECT TORQUE CONTROL. PROBLEM STATEMENT DTC was proposed in the middle of 1980's by Depenbrock and Isao Takahashi [9], [11]. The basic idea of DTC for induction motor is slip control, which exploits the relationship between the slip and the electromagnetic torque [2]. In the 1990's, DTC for was developed for PMSM [7], [12], [13]. By comparison for instance the Rotor Field Oriented Control, the DTC has some essential advantages such as less dependency of machine parameter, simpler implementation and quicker dynamic torque response. There is no current controller needed in DTC, because it selects the voltage space vectors according to the errors of flux linkage and torque. The most common way to carry out the DTC is a switching table and hysterics controller, as is largely described in [8] and [14]. In Fig. 2 is depicted a typical DTC system. It includes flux and torque estimators, flux and torque hysteretic controllers and a switching table. Usually a DC bus voltage sensor and two output current sensors are needed for the flux and torque estimator. Speed sensor is not necessary for the torque and flux control. The switching state of the inverter is updated in each sampling time. Within each sampling interval, the inverter keeps the state until the output states of the hysteretic controller change. Therefore, the switching frequency is usually not fixed; it changes with the rotor speed, load and bandwidth of the flux and torque controllers. Figure 2. Control of DTC A. Transformation abc-αβ (Clark): As control DTC is a vectorial control, it is necessary to have the components of Concordia of the currents and stator voltages of the PMSM. One thus breaks up the three stator currents isabc and the three stator voltages vsabc into components direct (vs) and quadratic (vs) such as: xs x s 1 0.5 0.5 xsa 2 x , sb 3 0 3 3 2 2 xsc where the parameter x (7) can be Vs or is. Since the model of the PMSM is expressed in the reference model (d-q), a transformation from the two-phase system (α-β) to the two-phase system (d-q) (Concordia) proves to be essential: isd cos( ) isq sin( ) sin( ) is . (8) cos( ) is B. The Estimator 1) Flux Estimator The stator electric equations in the reference model (α-β) are given by the following equations: d s Vs rs .is dt V r .i d s s s s dt (9) where the flux is expressed as follows: t ˆ s (Vs rs .is ).dt 0 t ˆ s 0(Vs rs .is ).dt ˆ ˆ j. ˆ s s s (10) For the high speeds, the voltage drop is neglected and the equations become: t ˆ V .dt s s t t ˆ s t Vs .dt s 2s 2s (11) 2) Torque Estimator The electromagnetic torque is given an equation derived from (4) as follows: Ce 3p ( s .is s .is ) 2 (12) where p is the number of pairs of poles C. Inverter switching control The switches of the voltage inverter, depicted in Fig.3, must be ordered so as to maintain the flow and the torque of the machine. The vector of the stator voltage can be written in the form: Vs 2 .U 0 .( S a Sb .e 3 2 j 3 Sc .e 4 j 3 ) (13) Where (Sa, Sb, Sc) are the logical state of the three switches: Si = 1 means that the high switch is closed and the low switch is open (Vi = +U0) and Si = 0 mean that the high switch is opened and the low switch is closed (Vi = -U0). The eight voltage vectors are expressed as follows: V1 V8 0 2 V2 3 .U 0 2 3 .U 0 .(0.5 j ) V3 3 2 2 3 .U 0 .(0.5 j ) V4 3 2 2 V5 .U 0 3 2 3 V6 .U 0 .(0.5 j ) 3 2 V7 2 .U 0 .(0.5 j 3 ) 3 2 (14) The eight voltage vectors Vi can be represented on the complex plane in certain positions as is depicted in Fig.4. Figure 3. Typic voltage inverter The machine’s flow and torque control are done by the discrete events via selecting of the vector of voltage from the switches of the inverter. As we have three switches, 23 = 8 possibilities results for the Vs vector. Based (13), two of these eight possibilities (Sa,Sb,Sc)=(0,0,0) and (Sa,Sb,Sc)=(1,1,1) correspond to the null vector (i.e. the vectors V1 and V8). Different states of the switches are provided in Tab.1 TABLE I. THE LOGICAL STATES OF THE INVERTER SWITCHING Figure 4. The voltage vectors and their area of detection D. Control vector flux In order to obtain good dynamic performances, a corrector with hysteresis with two levels is the simplest and best solution adapted to the DTC (see Fig. 5). This type of controller is able to easily control and maintain the terminus of the vector flux Φs in a circular ring, that suggesting its name: flow corrector. The output of the corrector represented by a Boolean variable eΦ (=0 or 1) must indicate if the module of flow must decrease (eΦ=0) or increase (eΦ=1) by such kind to always maintain ˆ s sref Figure 7. Corrector of the torque with hysteresis on 3 levels F. Law of control Basically, the law of control implements the rules of choice of vector VS. There are three parameters that matter for choosing the adequate vector VS: Figure 5. The flow corrector with hysteresis on 2 levels As the direction of the vector flow Φ s is given by the selected vector of voltage Vi, the sequence of the vectors voltage maintains the flow in an annulus equal to the width of hysteresis. In the Fig. 6 is depicted the effect of the correct flow. 1) The sector determined by the phase of estimated flow arctg . There are six sectors which the phase can belong. 2) The state from the 2-level hysteretic flow corrector. 3) The state from the 3-level hysteretic torque corrector. This typical look-up-table control technique is given for PMSM in Tab.II. TABLE II. DECISION TABLE FOR PMSM CONTROL Figure 6. The sequence of the vectors voltage E. Control Torque The corrector of the torque has three levels. It makes it possible to control the motor in both directions of rotation in terms of the positive or negative torque. The output of the torque corrector is the Boolean variable eCe which must limit the torque to a value such as Ceref Cˆ e Ce . As it can be seen in Fig.7 the output eCe can take three values according to the following rules: If the error of the torque: Ceréf Ce >0, then it is necessary to increase the torque: eCe= 1 ; If the error of the torque: Ceréf Ce<0, then the torque should be decreased: eCe= 1 ; If the error of the torque: ∆Ce ≤Ceréf Ce ≤∆Ce it is necessary to keep the same value of the torque: eCe= 0. For example if the flow is in sector 1, and the flow Φs trend to increase (eΦ=1) and the torque also is increasing (eCe=1), the vector voltage to be applied to the PMSM will be V3. This choice will have the effect of decreasing the motor’s torque. Based on Fig.8, different cases for the vector voltage choosing when the vector flux is located in the certain sector. If V6 is selected flow must decrease (eΦ=0) and also torques (eCe = 1). If V1 or V8 is selected flow must remain constant (eΦ= the precedent state) and the torque decreases (eCe=0). If V3 is selected flow must increase (eΦ=1) and also torques (eCe=1). If V7 is selected flow must increase (e Φ =1) and the torque must decrease (eCe= 1). If V4 is selected flow must decrease (eΦ=0) and the torque must increase (eCe=1). Figure 8. The vector voltage when the vector flux is located in certain sector IV. SIMULATION AND RESULTS A. Model Verification In Fig.9 is presented the entire diagram of an original structure of the DTC for PMSM in the reference model d-q. The currents isd, isq, Vsd and Vsq are the subject of the Clark’s transformation in order to obtain the components isα, isβ, Vsα and Vsβ. The components are going to the estimator of torque and flow as well as to the detector of the sector. Thereafter, the estimated values are compared with the references to be applied to the hysteretic correctors. Their outputs together the reported sector from detector are introduced into a table of commutation where is decided the right combination of switches to the inverter. The inverter will generate the voltage on three-phase current path. After that they will be transformed into coordinates d-q, and the output voltages Vsd and Vsq are applied in average values at the stator’s terminals of the PMSM. The MATLAB/Simulink environment was used to implement the model of the permanent magnet synchronous motor according to the d-q model and to develop all the required functional blocks. B. Results of Simulation A certain PMSM was used in our study with the following parameters: Torque nominale=14.2Nm, p=4, rs=0.4578Ω, Φf=0.171Wb, Lsd=3.34mH, Lsq =3.58mH, J = 0.001469kgm2. Figure 9. Blocks for the simulation of the DTC under Matlab/Simulink The inverter dc bus voltage is 300V. We supposed that the stator magnetic flux amplitude value is the same as the value of the permanent magnet flux. Also at t=0.07s, a differential torque step from 8Nm to 0Nm and at t=0.14s from 0Nm to 8Nm is applied as the reference torque value. The simulation results are graphical represented in Fig. 10 to 14 and reflects right behavior of the machine with DTC. The characteristics obtained for the simulated motor are similar with the other reported in literature. They prove the efficiency of DTC system. Figure 10. Trajectory of flux Figure 11. Electromagnetic Torque performances and the quality of the control are reflected in hardware implementation. Machine control is a complex subject involving issues from the embedded systems and microelectronics to the power electronics. This kind of electronics working with analog and digital signals and also with voltages from milivolts to kilovolts in the same module is a challenge for packaging and the reliability. The way to the high capable electronics starts with the appropriate model and functional simulation of the systems. In this article we have tested a model of the system PMSM-voltage inverter DTC controller for a certain machine. REFERENCES [1] [2] [3] [4] Figure 12. Stator voltage (V) [5] [6] [7] [8] [9] Figure 13. Evolution of the Amplitude of Φs [10] [11] [12] [13] [14] Figure 14. Rotor Speed CONCLUSIONS The technology of PMSM control becomes essential for many applications including the electric vehicles. The A. Lagrioui, H. Mahmoudi “Modélisation et Simulation de la commande directe du torque appliquée à une MSAP” ICEE’08, 2008. H. Bausch, W.Zeng K.Kanelis B.Lange “Torque Control of current excited synchronous machines for electric vehicules” ICEMA proceeding Vol2 septembre 1993. I. Boldea N. Muntean “Direct Voltage vector speed control of surface permanent magnet synchronous motor drives” ICEM proceeding Vol.2 septembre1994 J. Thomas K. René A.A. Melkebeek “Direct Torque Of Permanent Magnet Synchronous Motors- An Overview” 3RD IEEE – April 2006. M. Kadjoudj1, S. Taibi “Modified Direct Torque Control of Permanent Magnet Synchronous Motor Drives”, IJ-STA, Volume 1, N° 2, December 2007, pp. 167−180. Carlos Canudas de Wit « Modélisation contrôle vectoriel et DTC » , HERMES Science Europe Ltd,2000. M. W.Naouar, L. Charaabi, E. Monmasson, and I. Slama-Belkhodja; "Realization of a library of FPGA reconfigurable IP-Core functions for the control of electrical systems," in Proc EPE-PEMC'04, RigaLatvia September 2004. M. W.Naouar, E. Monmasson, and I. Slama-Belkhodja, "FPGA-based torque controller of a synchronous machine," in Proc. IEEE-ICIT'04, pp.8-10, Hammamet, Tunisia, Dec.2004. Zhong, L.; Rahman, M.F.; Hu, W.Y.; Lim, K.W. "Analysis of direct torque control in permanent magnet synchronous motor drives" Power Electronics, IEEE Transactions on Volume: 12 Issue: 3 , May 1997 Page(s): 528 – 536 Tang, P., Yang, G., Luo, M., Li, T., “A Current Control Scheme with Tracking Mode for PMSM System”, Systems and Control in Aerospace and Astronautics 1st International Symposium, pp. 872876, 2006 Laurent, J., Jabbar, M. A.,Qinghua, L., “Optimization of the Constant Power Speed Range of a Saturated Permanent-Magnet Synchronous Motor”, IEEE Transactions on Ind. App., Vol.42, No.4, pp. 10241030, 2006. M. Pacas and J. Weber, “Predictive direct torque control for the PM synchronous machine,” IEEE Trans. Ind. Electron., vol. 52, no. 5, pp. 1350–1356, Oct. 2005. J. Luukko, M. Niemel¨a, and J. Pyrh¨onen, “Estimation of the flux linkage in a direct-torque-controlled drive,” IEEE Trans. Ind. Electron., vol. 50, no. 2, pp. 283–287, Apr. 2003. M. Boussak, “Implementation and experimental investigation of sensorless speed control with initial rotor position estimation for interior permanent magnet synchronous motor drive,” IEEE Trans. Power Electron., vol. 20, no. 6, pp. 1413–1422, Nov. 2005.