Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Directed Model Checking
– Planning and Model Checking –
Stefan Edelkamp
1
Overview
• Planning
• Abstraction and Heuristics in Planning
• Common Ground Planning - Model Checking
• Planning via Model Checking
• e.g. State Trajectory Constraints
• e.g. Model Checking Integrated Planning
• Model Checking via Planning
• e.g. Promela Planning
• e.g. Petri Net Planning
Overview
1
2
Action Planning
Action planning refers to a world description in predicate logic, where
• a number of predicates AP describes what can be true or false in each state of
the world
• by applying operations in a world, we arrive at another world where different
atoms might be true or false
(:action load-truck
:parameters (?obj ?truck ?loc)
:precondition
(and (obj ?obj) (truck ?truck) (loc ?loc)
(at ?truck ?loc) (at ?obj ?loc))
:effect
(and (not (at ?obj ?loc)) (in ?obj ?truck)))
• only some atoms are affected by an operator, most remain unchanged
Action Planning
2
Strips Planning
STRIPS planning problem: finite state space problem P =< S, O, I, G >, where
• S ⊆ 2AP is the set of states,
• I ∈ S is the initial state, G ⊆ S is the set of goal states
• O is the set of operators that transform states into states;
• For O = (P, A, D) ∈ O, P ⊆ AP is the precondition list, A ⊆ AP is the add
list, and D ⊆ AP is the delete list
(:action load-truck-o-t-l
:precondition
(and (at-t-l) (at-o-l))
:effect
(and (not (at-o-l)) (in-o-t)))
Given S with P ⊆ S, its successor is S 0 = (S \ D) ∪ A.
Action Planning
3
Abstraction in Planning
An abstract planning problem P|R = < S|R , O|R , I|R , G|R > of a propositional
planning problem < S, O, I, G > with respect to a set of propositional atoms R is
defined by
1. S|R = {S|R | S ∈ S},
2. G|R = {G|R | G ∈ G},
3. O|R = {O|R | O ∈ O}, with O|R = (P |R , A|R , D|R )
πR : solutions for abstract planning problem P|R
δR : optimal abstract plan length
Action Planning
4
Planning Pattern Databases
A planning pattern database DR with respect to a set of propositions R and a
propositional planning problem < S, O, I, G > is a collection of pairs (v, S) with
v ∈ IR and S ∈ S|R , such that v = δR (S)
DR = {(δR (S), S) | S ∈ S|R }.
opt
An optimal abstract plan πR for P|R is always shorter than an optimal plan π opt for
P, i.e. δR (S|R ) ≤ δ(S), for all S ∈ S
Action Planning
5
Proof:
π = (O1, . . . , Ok ) sequential plan for < S, O, I, G > ⇒ π|R = (O1|R , . . . , Ok |R )
solution for P|R = < S|R , O|R , I|R , G|R >
Suppose, δR (S|R ) > δ(S) for some S ∈ S
π opt = (O1, . . . , Ot): optimal plan from S to G in original planning space P ⇒
π opt|R = (O1|R , . . . , Ot|R ) valid plan in P|R with plan length ≤ t = δ(S)
Contradiction!
Remark: Strict inequality δR (S|R ) < δ(S): some operators Oi|R are void, or ∃
alternative even shorter paths in abstract space
Action Planning
6
3
Relaxed Planning Heuristic
.
Relaxation a+ of (STRIPS) action a = (pre(a), add(a), del(a)) is defined as
a+ = (pre(a), add(a), ∅).
Relaxation of a planning problem: one in which all actions are substituted by their
relaxed counterparts.
Any solution that solves the original plan also solves the relaxed one
h+: length of the shortest plan, that solves the relaxed problem
Solving relaxed plans optimally is NP hard , but decision problem to determine, if a
relaxed problem has a solution, is computationally tractable
Extension to planning problems with numerical state variables and further to
non-linear tasks
Relaxed Planning Heuristic
7
4
Common Ground
Model checker searches counterexample to falsify a given specification, planner
searches for sequence of actions to satisfy a goal
Kripke Structure: finite set of states, set of initial states, transition relation, and state
labeling function.
⇒ propositional planning problems can be modeled based on Kripke structures
Thorem Any propositional deterministic planning problem can be modeled as an
LTL model checking problem.
Achieving any propositional goal g can be expressed in form of a counter-example
to the temporal formula f = A(G ¬g) in LTL.
The inverse is often available, in particular when model checking safety properties
Common Ground
8
5
Planning via Model Checking
• Symbolic Planning: use symbolic state information in form of BDDs to cope
with the increasing number of states to be represented
• Nondeterministic Planning: A plan (state-action table) is weak if for each state
a goal can be reached, strong if all terminal states are goals, and strong cyclic
strong and for each state a terminal one is reachable
• Conformant and Contingent Planning: Belief-state planning (multiple initial
states, partial observation) dealt with e.g. BDDs
• Planning with Temporary Extended Goals: Goal specification extended by
temporal logic formulas
• Planning with Processes and Events: Extended PDDL has been converted to
the timed automata language of the model checker UPPAAL
• Planning with Control-Rules: Hand-tailored planners attach supplementary
information in form of temporal formulae to prune the state space
Planning via Model Checking
9
6
State Trajectory Constraints
. . . one of two rather disjoint language features proposed for IPC-5
• important step of the agreed fragment of PDDL toward the description of
temporal control knowledge and to temporally extended goals
• Conditions that must be met during the execution of a plan
• expressed through temporal model operators with bounded quantification over
domain objects
• feature also higher levels of PDDL, namely metric and temporal planning .
State Trajectory Constraints
10
Automata for the Example Instances
A fragile block can never have something above it is expressed as
(:goal (and (always (forall (?b - block) (implies (fragile ?b) (clear ?b))))
LTL formula for two selected blocks a and b:
G ((fragilea -> cleara) & (fragileb -> clearb))
The corresponding automaton:
State Trajectory Constraints
11
Other Examples
each block should be picked up at least once:
(:goal (and (forall (?b - block) (sometime (holding ?b)))
LTL formula for 2 block LTL: (F holdinga) & (F holdingb)
in some state visited by the plans all blocks are on the table
(:goal (sometime (forall (?b - block) (ontable ?b)))
LTL: F (ontablea & ontableb)
State Trajectory Constraints
12
Other Examples
Each truck should visit each city exactly once is given by
(:goal (and (forall (?t - truck ?c - city) (at-most-once (at ?t ?c)))
(forall (?t - truck ?c - city) (sometime (at ?t ?c))))
LTL formula
F attruckacitya & G (attruckacitya -> (attruckacitya U (G !attruckacitya)))
Corresponding Büchi-Automaton:
State Trajectory Constraints
13
Exploration
Only finite runs to judge, drop Büchi acceptance condition and work with the
corresponding condition for NFAs
Easiest way to implement a planner: state vector s for current planning state is
extended to (s, n), with n being the corresponding automata state
(approach featured in explicit-state model model checkers like SPIN)
Automaton non-deterministic ⇒ successors s0 of s in original plan space may imply
≥ 1 successor (s0, n1), . . . , (s0, nk ) in the extended one.
State Trajectory Constraints
14
Language Compilation
Have the language extensions enriched PDDL language?
Working of the automata: predicate (at-state ?n - state)
Automata Transitions: static predicate (transition ?n1 ?n2 - state).
Accepting States: tag (accepting ?n - state).
Translation: Action for each transition: current automaton state and transition
conditions as preconditions and the successor state as the add effect
Synchronize: automata transition with ordinary actions
Extension more than one state trajectory constraint: introduce additional parameter
?a - automata to the the propositions
State Trajectory Constraints
15
Model Checking Integrated Planning
Initial Work: planning with the µcke model checker
Minimized Encoding: Fact-space exploration, partition and merge predicates
BDD package: Buddy
MIPS at IPC-2: explicit heuristic search algorithms based on bit-vector state
representation and relaxed planning heuristic as well as symbolic heuristic search
Between the Planning Competitions: explicit and symbolic pattern databases
MIPS at IPC-3: PDDL2.1 expressiveness, (plan at least in every domain)
After 2002: non-linear relaxed planning heuristics, posterior plan scheduling with
time-windows, external (symbolic) search
State Trajectory Constraints
16
Architecture of MIPS
4 parts: pre-compilation, heuristics, search algorithms, and post-compilation
domain.pddl
problem.pddl
Precompiler
static analyzer
ground
symmetry
cluster
intermediate representation
Heuristics
explicit PDBs
symbolic PDBs
numerical
RPH
Search Algorithms
relaxed plan
symbolic search
explicit search
RPH
BDDA*, BDD-BFS
A*, IDA*, EHC
sequential plan
scheduling
RPH
relaxed
temporal plan
Scheduler
temporal plan
State Trajectory Constraints
Critical Path
PERT
17
7
Model Checking via Planning
1. Bounded Model Checking: applies the same techniques to Model Checking
that are used in the Planning as Satisfiability approach
2. Directed Model Checking: mimics the success of heuristic search in action
planning, e.g. in the domain of hardware validation
Here: Direct Conversion of Model Checking Problems in PDDL (IPC4 Benchmark)
Compiler : Automatically generating a PDDL model from Promela syntax
Restrictions: Safety Properties, especially Deadlocks
fixed number of processes: dynamic creation of processes in PDDL would require a
language extension for dynamic object creation
Model Checking via Planning
18
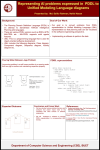
Example
Automata representation for the model of the 10 Dining Philosophers problem:
(Intermediate file produced by SPIN):
proctype philosopher
state 1 -(tr 3)-> state
state 6 -(tr 4)-> state
state 3 -(tr 5)-> state
state 4 -(tr 3)-> state
state 5 -(tr 6)-> state
6
3
4
5
6
line
line
line
line
line
11
12
14
16
16
=>
=>
=>
=>
=>
forks[ pid]!fork
forks[ pid]?fork
forks[(( pid+1)%10)]?fork
forks[ pid]!fork
forks[(( pid+1)%10)]!fork
Process P : finite graph (S(P ), trans, init(P ), curr(P ), δ(P ))
Channel Q: finite graph (S(Q), head(Q), tail(Q), δ(Q), mess(Q),cont(Q))
Shared and local variables are modeled by PDDL fluents
Model Checking via Planning
19
Domain Encoding
Operators: queue-read, queue-write, advance-queue-head,
advance-empty-queue-tail, advance-non-empty-queue-tail,
process-trans
• activate-trans: activates a transition in a process of a given type if in the
current state we have an option to perform the local transition
• queue-read and queue-write actions, initialize reading/writing of a
message.
• advance-queue-head, advance-empty-queue-tail,
advance-non-empty-queue-tail: queue update operators, set settled
flag, which is a precondition of every queue access action
• process-trans: executes local transition resets the flags.
Model Checking via Planning
20
Blocking and Deadlocks
Blocked Transitions:
1. read message does not match the requested message
2. queue capacity is either too small or too large
All active transitions in a process block ⇒ process itself will block
All processes are blocked ⇒ deadlock in the system
Planning Goal: conjunction of atoms requiring that all processes are blocked
Elegant Model: Blocking implemented as a set of derived predicates (PDDL2.2)
Model Checking via Planning
21
8
Planning for Petri Nets
Place-Transition Net: 4-tuple (P, T, I −, I +), where
• P = {p1, . . . , pn} is the set of places,
• P = {t1, . . . , tm} is the set of transitions with 1 ≤ n, m < ∞ and P ∩ T = ∅.
Backward and forward incidence mappings I −, I +: map elements of P × T to IN
Marking: maps elements of P to IN , where M (p) denotes the # tokens in p
Representation: M is provided in vector denotation
Errors: Deadlocks, failed invariances, . . .
Planning for Petri Nets
22
Place-Transition PN for Dining Philosophers
·
J U+ 3
·
I T
++33
3
+
+ 33
++ 33 ++ 33 ++ 33
+ 33
+ 3
++ 333
+
33
+++
+++
++ ++
++
++
+
Planning for Petri Nets
J U+ 3
·
·
·
·
p
J U++33
J U++33
T
ppp{{=
++33
p
3
3
p
+
+
{
p
3
3
{
p
++ 33
+
+
+ 33
pp+ 3 {{
++ 333
++ 33
ppp +{+ {3{33
p
p
++ 33
++ 3p3pp
{{ + 33
{ { +++ 33
++ 33
+p+ p 33
p
{
p
++ 33 pppp ++ 33 {{{
++ 33
++ pp33p3p
++ {{{333
++ 333
p 3
{
3
33
p
+
+
++
p
{
33
33
pp ++
3 {{ ++
+
{
wppp
++
++
++
{{
{
++ {{
++
++
++{{{ ++ ++ {+
+
++
{
{ +
++
++
{{ ++
{
+
{
+
+
++
{
++
++
{{
+
{
{
23
Petri Net Search
Markings correspond to states in a state space.
Petri nets are often supplied with an initial marking M0.
Transition t is enabled, if all its input places contain at least one token, i.e.,
M (p) ≥ I −(p, t) for all p ∈ P .
If a transition is fired, it deletes one token on each of its input places and generates
one on each of its outputs places.
Transition t enabled at marking m may fire and generates a new marking
M 0(p) = M (p) − I −(p, t) + I +(p, t) for all p ∈ P , written as M → M 0.
Planning for Petri Nets
24
Reachability Analysis
Recall: # tokens for a node in a place transition net is not bounded a priori
⇒ # possible states is infinite
Main idea: include partial markings, that introduce don’t care symbol ω into the
state vector, denoting a marking of an unbounded place
Algorithm starts with a reachability set R consisting of marking M0 and generates a
coverability tree
- Nondeterministically a partial marking M in R at a leaf is chosen
- ∀ enabled transitions t: generate a new partial marking M 0 by firing t
- if ∃ marking M 00 on the path from M0 to M 0 with M 00 ≤ M 0 and M (p) < M 0(p),
set M 0(p) to ω
Planning for Petri Nets
25
Numerical Encoding
Object types: place and transition.
Predicates (incoming ?s - place ?t - transition) and (outgoing ?s
- place ?t - transition), representing the two sets I − and I +.
Marking mapping: fluent (number-of-token ?p - place ?t - trans)
(:action fire-transition
:parameters (?t - transition)
:preconditions
(forall (?p - place)
(or (not (incoming ?p ?t)) (> (number-of-token ?p) 0)))
:effects
(forall (?p - place)
(when (incoming ?p ?t) (decrease (number-of-token ?p))))
(forall (?p - place)
(when (outgoing ?t ?p) (increase (number-of-token ?p)))))
Planning for Petri Nets
26
Initial State and Deadlock
Initial state: encodes net topology and initial markings using predicates incoming
and outgoing and a numerical predicate (fluent) (number-of-tokens) to
specify M0
Condition that a transition is blocked modeled with a derived predicate
(:derived block (?t - transition)
(exists (?p - place)
(and (incoming ?p ?t) (= (number-of-token ?p) 0))))
Consequently, a deadlock to be specified as the goal condition:
(:derived deadlock (forall (?t - transition) (blocked ?t)))
PDDL encoding: 1-to-1 correspondence to original place-transition net
Planning for Petri Nets
27
Propositional Encoding of Petri Net Transition
(:action fire-transition
:parameters (?t - transition)
:precondition
(forall (?p - place)
(or (not (incoming ?p ?t))
(exists (?n - number)
(and (number-of-tokens ?p ?n) (is-not-zero ?n)))))
:effect
(and
(forall (?p - place ?n1 ?n2 - number)
(when
(and (incoming ?p ?t) (inc ?n1 ?n2)
(number-of-tokens ?p ?n2))
(and (not (number-of-tokens ?p ?n2))
(number-of-tokens ?p ?n1))))
(forall (?p - place ?n1 ?n2 - number)
(when
(and (outgoing ?t ?p) (inc ?n1 ?n2)
(number-of-tokens ?p ?n1))
(and (not (number-of-tokens ?p ?n1))
(number-of-tokens ?p ?n2)))))))
Planning for Petri Nets
28
References
[1] F. Bacchus and F. Kabanza. Using temporal logics to express search control knowledge for
planning. Artificial Intelligence, 116:123–191, 2000.
[2] P. Bertoli, A. Cimatti, and M. Roveri. Heuristic search symbolic model checking = efficient
conformant planning. In International Joint Conference on Artificial Intelligence (IJCAI), pages
467–472, 2001.
[3] P. Bertoli, A. Cimatti, M. Roveri, and P. Traverso. Planning in nondeterministic domains under
partial observability via symbolic model checking. In International Joint Conference on Artificial
Intelligence (IJCAI), 2001.
[4] A. Biere, A. Cimatti, E. Clarke, and Y. Zhu. Symbolic model checking without BDDs. In Tools
and Algorithms for the Construction and Analysis of Systems, Lecture Notes in Computer
Science. Springer, 1999.
[5] R. Bloem, K. Ravi, and F. Somenzi. Symbolic guided search for CTL model checking. In
Conference on Design Automation (DAC), pages 29–34, 2000.
[6] T. Bylander. The computational complexity of propositional STRIPS planning. Artificial
Intelligence, pages 165–204, 1994.
Planning for Petri Nets
29
[7] A. Cimatti, M. Roveri, and P. Traverso. Automatic OBDD-based generation of universal plans in
non-deterministic domains. In National Conference on Artificial Intelligence (AAAI), pages
875–881, 1998.
[8] H. Dierks, G. Behrmann, and K. Larsen. Solving planning problems using real-time model
checking. In Artificial Intelligence Planning and Scheduling (AIPS)–Workshop on Model
Checking, pages 30–39, 2002.
[9] S. Edelkamp. Promela planning. In Workshop on Model Checking Software (SPIN), Lecture
Notes in Computer Science, pages 197–212. Springer, 2003.
[10] S. Edelkamp. Taming numbers and durations in the model checking integrated planning
system. Journal of Artificial Research (JAIR), 20:195–238, 2003.
[11] S. Edelkamp. Generalizing the relaxed planning heuristic to non-linear tasks. In German
Conference on Artificial Intelligence (KI), 2004. 198–212.
[12] M. Fox and D. Long. PDDL2.1: An extension to PDDL for expressing temporal planning
domains. Journal of Artificial Research (JAIR), 20:61–124, 2003.
[13] A. Gerevini and D. Long. Plan constraints and preferences in pddl. A Proposal for the
Language of the Fifth International Planning Competition, 2005.
[14] F. Giunchiglia and P. Traverso. Planning as model checking. In European Conference on
Planning (ECP), pages 1–19, 1999.
[15] J. Hoffmann. The Metric FF planning system: Translating “Ignoring the delete list” to numerical
state variables. Journal of Artificial Intelligence Research, 20:291–341, 2003.
[16] J. Hoffmann and B. Nebel. Fast plan generation through heuristic search. Journal of Artificial
Intelligence Research, 14:253–302, 2001.
[17] F. Kabanza and S. Thiebaux. Search control in planing for termporally extended goals. In
International Conference on Automated Planning and Scheduling (ICAPS), pages 130–139,
2005.
[18] H. Kautz and B. Selman. Pushing the envelope: Planning propositional logic, and stochastic
search. In National Conference on Artificial Intelligence (AAAI), pages 1194–1201, 1996.
[19] U. D. Lago, M. Pistore, and P. Traverso. Planning with a language for extended goals. In
National Conference on Artificial Intelligence (AAAI), pages 447–454, 2002.
[20] M. Pistore and P. Traverso. Planning as model checking for extended goals in non-deterministic
domains. In International Joint Conference on Artificial Intelligence (IJCAI), pages 479–486,
2001.