Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Hall effect wikipedia , lookup
Magnetic monopole wikipedia , lookup
Eddy current wikipedia , lookup
Electroactive polymers wikipedia , lookup
Nanofluidic circuitry wikipedia , lookup
Static electricity wikipedia , lookup
Maxwell's equations wikipedia , lookup
Electromotive force wikipedia , lookup
Lorentz force wikipedia , lookup
Electric current wikipedia , lookup
Electricity wikipedia , lookup
Electromagnetic field wikipedia , lookup
Faraday paradox wikipedia , lookup
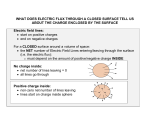
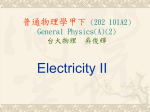
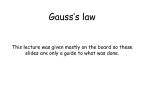
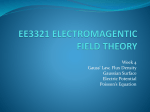
Chapter 3 GAUSS’ LAW • Introduction • Flux of vector field • Solid angle • Gauss’s Law • Symmetry • Spherical symmetry • Cylindrical symmetry • Plane symmetry Figure 1 E field at point p due to a charge distribution (0 0 0 ) • Superposition of symmetric geometries • Motion of point charges in electric fields FLUX OF VECTOR FIELD • Summary INTRODUCTION Coulomb’s Law and the Law of Superposition were introduced in addition to the concept of electric field defined as: → − − → F E= (3.1) The electric field is a vector field just like the gravitational field. It can be expressed in terms of cartesian coordinates as: − b → E = + b + b (3.2) Last lecture focussed on the calculation of the electric field using Coulomb’s law plus Superposition. Coulomb’s Law + Superposition Discrete charges: −−→ X E = =1 1 c 2 r0 40 0 Vector fields, such as an electric field, magnetic field, fluid flow, etc, have both a magnitude and direction that depend on the position. Vector fields can be characterized using two important concepts, namely, flux and circulation. For example, the rate of loss of water out of a draining bath tub can be related to the litres/sec flowing down the drain and the circulation or angular momentum carried away by the flowing water. The concepts of flux and circulation make it possible to express Coulomb’s Law in a form that is more general. Flux, Φ is the normal component of the vector → − field, F through any surface. It is given by the integral over the surface. (3.3) Continuous charges: In cartesian coordinates the E field at the point () is written as an integral over the charge distribution at 0 (0 0 0 ) : Z −−−−→ (0 0 0 )0 0 0 1 E() = (3.4) rd 0 40 20 This lecture will focus on exploiting Gauss’s law to calculate electric fields. Gauss’s Law relates the net flux of the electric field over a closed surface to the net charge enclosed by the closed surface. This is of sufficient import to justify a recap of what was discussed last lecture. Φ= Z − − → → F · S (3.5) where the scalar product, also called dot product, was → − − → defined in P113, namely F · S = cos where → − is the angle between the vector F and the normal − → to the surface element S Note that the flux is the normal component to the surface of the vector field, it excludes the component along the surface; the surface component figures in the definition of circulation to be discussed next lecture. The most interesting case is when the surface is closed, this is called a Gaussian surface. In this case the net flux outwards is written as: Φ= I where the symbol I − − → → F · S (3.6) means a closed surface. By de− → finition, for a closed surface the surface vector S is assumed to point outward, that is Φ is taken outwards. 17 Figure 2 Solid angle subtended by an area element dS and analog to the angle subtended by a line element dl. Point enclosed by a closed surface The integral for a closed surface surrounding a point is SOLID ANGLE The concept of solid angle should be familiar to you. It is a measure of the apparent size of a surface area as seen when viewing from some location. It is analogous to the two-dimensional problem of the angle subtended by a line when viewed from a given location. It is easiest to understand solid angle by comparison with the concept of angle. In two dimensions, the infinitesimal angle ∆ subtended by a short line element at a distance r is given by the projection of the line element on a concentric circle divided by the radius r of the circle. That is, ∆ = sin The unit of angle is the radian. The analogous relation for three dimensions gives the definition of solid angle. Consider a surface area − → element S at a radius r. Then the solid angle ∆Ω is defined as: ∆Ω = − → S · b r cos = 2 2 (3.7) where is the angle between the normal to the surface element and unit vector b r. The solid angle is the apparent area of the surface element projected onto a concentric sphere, divided by the square of the radius of the sphere. The unit of solid angle is the steradian which is dimensionless. Thus the net solid angle subtended by some surface is given by Z Ω = Z − → b r · S 2 (3.8) The sun and the moon happen to subtend almost identical solid angles at the earth even though there is a factor of 200 difference in size which is cancelled by a similar ratio of the distances from the earth. The solid angle of a closed surface is an important special case that will be used frequently. 18 Figure 3 Solid angle for a closed surface, a) enclosing the point, and b) not enclosing the point. Ω= I − → b r · S = 4 2 (3.9) since the surface area of a sphere is 42 then a complete sphere must subtend a total solid angle of 4 − → steradians. The vector S is always taken to point outwards for a closed surface. Note that any shaped closed surface subtends 4 steradians relative to a point inside the closed surface, that is, at all angles the closed surface completely encloses the point independent of whether the enclosing surface is a sphere, a cube, or some arbitrary shape. Point external to closed surface For points lying outside the closed surface, the net solid angle is zero. This can be seen by dividing the closed surface into two halves having the same perimeter as seen from the point illustrated in the figure. Both halves subtend the same magnitude solid angle. However, since − → the vector S is always taken to point outwards, then the cosine has the opposite sign for the two halves and thus the integral of the solid angle over the external closed surface is zero since the contributions from the two halves cancel. FLUX OF ELECTRIC FIELD FOR AN ARBITRARY GAUSSIAN SURFACE ENCLOSING A POINT CHARGE Since the electric field for a point charge is given by − → E= 1 b r 40 2 (3.10) For an arbitrary closed surface enclosing the point charge the net flux is I → − − → Φ = E · S →! I Ã − b r · S = (3.11) 40 2 But the above discussion of the solid angle gave that − → Z Z b r · S (3.12) Ω = 2 This is just the term in brackets, that is I Φ= Ω 40 (3.13) Also from above we have that for a closed surface enclosing the point charge the total solid angle, in steradians, is given by − → I I b r · S Ω = = 4 steradians (3.14) 2 This is true for any shaped closed surface surrounding the point. Thus this gives that the net flux of the electric field due to an enclosed point charge is given by I I → − − → Φ= E · S = (3.15) Ω = 40 0 where the 4 factors cancel. The above argument shows that the net flux out of any shaped Gaussian surface enclosing a point charge q is independent of the shape of the Gaussian surface or the exact location of the point charge within the enclosed volume. The assumptions made in obtaining this result are: a) Point charge b) Coulomb’s law. This is a much more powerful statement of Gauss’ Law in that the net flux is independant of the shape of the closed surface or the location of the enclosed point charge. The above proof is consistent with Faraday’s description of the electric field in terms of electric field lines; that is, the number of field lines intersecting a concentric sphere is constant independant of the radius of the sphere. Since the number of field lines is conserved then it can be seen from figure 4 that the net flux of electric field lines is the same for any closed arbitrary closed surface enclosing a given point charge which is what has just been proved mathematically. GAUSS’ LAW The above proof that for a point charge the net flux out of a closed surface enclosing a point charge is independent of the shape of the Gaussian surface, now Figure 4 A single point charge surrounded by a concentric closed spherical surface and an irregular closed surface. can be extended by invoking the Principle of Superposition. Superposition can be used to integrate over the charge distribution throughout the volume enclosed by the closed Gaussian surface resulting in the final form of Gauss’s Law. The Principle of Superposition allows extension to arbitrary charge distributions. Consider charges within the enclosed surface. Each charge produces an field which add to produce the net electric field. That is: −−→ − → − → − → E = E1 + E2 + E3 + (3.16) Now since the flux Φ is just a number, that is, it is a scalar: Φ I = −−→ − → E · S − → − → E1 · S + I = = Φ1 + Φ2 + Φ3 + 1 2 3 = + + + 0 0 0 I − → − → E2 · S + (3.17) Thus one has that for an arbitrary distribution of charges, the net flux is: Φ = I −−→ − → E · S = Ã ! X =1 0 (3.18) Finally, one can write the sum over an arbitrary continuous charge density distribution by taking = for the infinitessimal volume to get the final form of Gauss’s Law. Gauss’s Law: Φ = I −−→ − → 1 E · S = 0 Z (3.19) 19 Figure 5 Closed Gaussian surface enclosing the positive charge (A), the negative charge (B) and both charges (C). The net flux out of these surfaces is positive for A, negative for B, and zero for C. This relates the net flux out of a closed Gaussian surface to the total charge lying within the enclosed volume. Note that the assumptions used to derive this are: • Coulomb’s Law • Principle of Superposition Note that the two crucial aspects of Coulomb’s law that lead to Gauss’ law are that the electric field for a point charge is: • exactly proportional to 1 2 , • the field is radial. Gauss’s law is a restatement of Coulomb’s law in a less transparent but more useful form. Gauss’ Law actually is one of Maxwell’s four laws of electromagnetism. Gauss’ Law is completely equivalent to Coulomb’s law for electrostatics or for slowly moving charges. However, Gauss’ law is more general and applies to electric fields arising from rapidly moving and accelerating charges. Really one should derived Coulomb’s Law from Gauss’s Law. It is interesting to apply Gauss’ Law to the case of the electric dipole. As seen in figure 5, if the Gaussian surface encloses only the positive charge then the net flux out is positive, if the Gaussian surface encloses only the negative charge then the net flux out is negative, that is the flux is flowing into the surface. If the Gaussian surface encloses both charges then the net flux out is zero. However, this does not mean that there is not electric field. Actually one has flux flowing inward in some locations and outwards at others, such that the net total is zero as seen in Figure 5. 20 Figure 6 Spherical shell of charge density SYMMETRY Symmetry is a powerful concept in physics that can simplify solution of complicated problems. One can discuss symmetry of systems under rotation, reflection and time reversal. For example, crystal lattices have certain spatial symmetries. Coulomb’s law implies a spherically-symmetric spatial symmetry for the electric field around a point charge. Such very general symmetry principles are especially powerful when combined with Gauss’ law for calculating electric fields. For certain charge distributions in physics, one can use symmetry to identify a particular Gaussian surface upon which the electric field is uniform and perpendicular to the surface. When such symmetries occur, it is easy to evaluate the flux integral for the special surface where the electric field is uniform and perpendicular. This allows use of Gauss’ Law in order to determine the electric field for this surface. Three symmetries will be considered; spherical, cylindrical, and plane. SPHERICAL SYMMETRY A) Electric field for a uniformly charged spherical shell Consider a uniform spherical surface of radius R and surface charge density The net charge Q = 42 From spherical symmetry one can see that the electric field must be radial and its magnitude can depend only on r, not angle. Therefore select a spherical Gaussian surface concentric with the charged shell and apply Gauss’ law. Outside the spherical shell: ≥ Gauss’ law gives Φ= I − − → → E · S = 0 (3.20) Figure 7 Concentric Gaussian surface outside a solid uniform spherical charge distribution. Figure 8 Concentric spherical Gaussian surface inside a uniform solid sphere of charge. Since is constant and normal to the spherical gaussian surface of radius r, the surface integral equals 42 . Thus one obtains 42 = 0 (3.21) That is: − → E= b r 40 2 ≥ (3.22) Note that the E field for a spherical shell of charge of radius R is the same as for a point charge Q. In fact, one gets Coulomb’s law by letting R go to zero. Inside the spherical shell ≤ Since there is no charge within a concentric spherical Gaussian surface inside the charged shell, then the net flux equals zero from Gauss’ law. From symmetry therefore we have that the electric field is zero inside the spherical charged shell. B) Electric field outside a uniformly charged solid sphere, ≥ Let the charged sphere, of radius , have a volume charge density The net charge = 43 3 . Again, from symmetry of figure 7 one can deduce that the electric field is radial and only depend on radius . For exactly the same argument given for the spherical shell, the external field is given by: − → E= b r 40 2 ≥ (3.23) C) Electric field inside a uniformly charged solid sphere, ≤ From the arguments for the spherical shell it is obvious that only the charge within the sphere of radius r contributes to the electric field, the spherical shell Figure 9 of charge in the region between and does not contribute to . Thus one has only to consider the charge within the sphere of radius , that is, 43 3 . Thus − → E= 4 3 3 b r 40 2 ≤ (3.24) Since = 43 3 then this can be rewritten as: − → E= 1 − → r 40 3 ≤ (3.25) Thus the field is zero at the origin, is proportional to for 0 , and then falls off as 12 like for a point charge outside of the charged sphere as shown in figure 9. In the 1900’s there were two possible models for the atom. Thomson’s model of the atom was of electrons distributed in a uniform positive charge distribution of the size of the atom, that is 10−10 The Rutherford 21 Figure 11 Gaussian surface for infinite line charge C/m. Figure 10 The electric field in the Thomson and Rutherford models of the atom. atom envisioned electrons orbiting around a small positive nucleus. These models predict a different E field at radii 10−10 m as shown in figure 10. In 1911, two of Rutherford’s students, Geiger and Marsden scattered alpha particles off gold atoms and proved that the electric field due to the nucleus continued to fall off as 12 down to the size of the nucleus of 10−15 confirming the Rutherford model of the atom. The gravitational field of the earth has the same radial form as the case of a uniform spherical charge. The only difference between the gravitational and electrostatic cases is that 10 is replaced by −4 and the mass density replaces the charge density This leads to the conclusion that inside the earth, the radial dependence of the gravitational field is proportional to , while outside the earth it has a 12 dependence. Inside the earth Hooke’s Law applies since the restoring force is proportional to the displacement . If you dropped a body into a hole through the center of the earth then the body would execute simple harmonic motion with a period of 1.4 hours, that is, the length of this lecture. Figure 12 Concentric Gaussian cylinder inside a cylindrical shell of charge Φ= I → − − → E · S = 2r = 0 (3.26) This gives that the E field is: − → E= b r 2 (3.27) This is the same answer as obtained previously by integration of Coulomb’s law. B) Thin cylindrical shell of charge of radius CYLINDRICAL SYMMETRY A) Electric Field for an infinite line charge Coulomb’s law was used to derive the electric field due to a line of charge density Coulombs/m. This problem has cylindrical symmetry, that is the electric field must radiate normal to the line charge. Note that a concentric cylinder of length L and cylindrical radius r perpendicular to the line charge, shown in figure 11, contains a charge L. The E field must be uniform and perpendicular to the cylinder and parallel to the ends of the cylinder. Thus the flux through the ends of the cylinder is zero. Using Gauss’s law we have the net flux through the cylinder is 22 For then the field is identical to the answer above. For then there is no charge inside the concentric cylindrical Gaussian surface shown in figure 12, thus the E field is zero. C) Uniform cylinder of charge of radius For the answer is as above for the infinite line 2 charge. However, for then only the fraction 2 of the linear charge density is inside the cylindrical gaussian surface. This causes the the E field to depend linearly of just like the case of the uniform sphere of charge. i.e. for − → E= r̄ 2 2 (3.28) Figure 13 Concentric charged cylindrical shells. Figure 14 Infinite plane sheet of charge density D) Two concentric equal and oppositely charged cylindrical shells; I → → − − E · S = 2∆ = ∆ (3.31) Consider that the inner cylindrical shell, of radius a, has a linear charge density of - C/m while the outer cylindrical shell, of radius b, has a linear charge density That is: of + C/m as shown in figure 13. a) (3.32) ⊥ = Obviously E = 0 inside the inner cylindrical shell 2 since there is no charge enclosed by a concentric Gaussian Note that this is independent of the distance from surface lying inside with the infinite sheet of charge. b) Between the concentric cylinders, Gauss’s law gives for a concentric cylindrical Gaussian surface of radius r perpendicular to the symmetry axis and length l; SUPERPOSITION OF SYMMETRIC 2 = − (3.29) Thus the electric field between the shells is: − → E =− b r 2 (3.30) where b is perpendicular to the symmetry axis. Note that the electric field points inwards since the inner charge density is negative. c) The radial electric field outside of both cylindrical shells is zero since the net charge enclosed by a cylindrical Gaussian surface with is zero if the two cylinders have equal and opposite line charge densities. PLANE SYMMETRY Consider a infinite plane sheet of areal charge density C/m2 . By symmetry the electric field must be perpendicular to the sheet charge and equal on both sides. Consider a small cylindrical Gaussian pill box enclosing an area ∆ of the charged surface shown in Figure 14. The net flux flowing out of each of the two flat surface of the pillbox is ∆ and zero flux from the cylindrical sides. Thus Gauss’s law gives: GEOMETRIES Gauss’s law is very powerful for deriving the electric field for those few case where a symmetry exists such that a Gaussian surface can be used for which you know the relative magnitude and direction of the E field. Unfortunately, for most cases there is no symmetry and thus one must use the brute-force method and evaluate the integral: − → E= 1 40 Z b r 2 (3.33) However, there are cases where superposition of symmetric systems can be used to calculate the fields due to non-symmetric systems. For example, consider the system shown in figure 15 where a cylindrical hole of radius 0 is drilled parallel to the axis of a uniform cylindrical charge distribution of radius and a distance between the axes of the cylinders. This can be solved by considering the superposition of the electric fields due to the uniform positive cylindrical charge distribution of radius plus that from the negative cylindrical distribution of radius 0 displaced by that cancels the charge distribution inside cylindrical hole. 23 Figure 15 Uniform cylindrical charge distribution of radius having a parallel cylindrical hole, of radius 0 drilled a distance from the axis. Figure 16 An electron moving transverse to an electric field MOTION OF POINT CHARGES IN ELECTRIC FIELDS Having used Coulomb’s law, or Gauss’s law, to compute the electric field distribution, then it is possible to use Newton’s Laws of motion to calculate the motion of charged objects in this electric field. The acceleration, , of a charged object of mass, and charge, in an electric field, , is given by Newton’s Law → − → − → F = E = − a That is: → − − → a = E (3.34) For uniform electric field one has the simple case of motion with constant acceleration which you discussed extensively in P113. It is useful to consider a simple case to illustrate the application of Newton’s law of motion to a problem in electrostatics. Example: Deflection of moving charged particles. Consider the case encountered in a cathode ray tube used in a television or computer CRT display. An electron, of mass and charge , initially at velocity v0 in the + direction, travels perpendicular to a uniform non-zero field between 0 ≤ ≤ 1 as shown in figure 16. The deflected electron then travels a further distance 1 ≤ ≤ 1 + 2 in a field-free region before hitting the screen. Calculate the deflection when the electron hits the screen. Assuming that the E field points in the − direction, then, since the electron charge is − the accel→ eration vector − a equals: → − b = bj a = bi + bj + k (3.35) (3.36) The charged particle travels a time in the region of the field given by: = 1 0 (3.37) The particle’s deflection when it exits the E field at time is: 1 2b − → r = bi + (3.38) j 2 The particle now continues in a straight line in the field-free region at an angle given by: tan = ()(1 0 ) 1 = = 0 02 (3.39) Thus the net deflection in the bj direction is: = 1 +2 = 1 +2 tan = 21 ( +1 2 ) (3.40) 02 2 Note the important fact that the deflection is proportional to , that is, the deflection of the electron beam in your television screen reproduces the magnitude of the electric field derived from the radio signal. Inserting typical values, where 1 = 3, 2 = 12 0 = 3106 , and = 103 C, then: Assume that the electron enters the E field at = 0 and = 0. Because the initial velocity is only in the direction and the acceleration is zero, then the velocity vector at time t is: 24 − → b = 0bi + bj v = bi + bj + k = 1 (16 10−19 )(103 ) ( (003)2 + (003)(012)) (911 10−31 )(3 106 )2 2 = 80 × 10−2 Of this 80m deflection, 1 = 09 and 2 = 71. That is, most of the deflection comes from the angular deflection of the beam. (3.41) SUMMARY Two methods have been presented for calculating the electric field. Coulomb’s Law: Discrete charges: −−→ X E = =1 1 c 2 r0 40 0 (3.42) Continuous charges: In cartesian coordinates the E field at the point () is written as an integral over the charge distribution at 0 (0 0 0 ) : Z −−−−→ (0 0 0 )0 0 0 1 E() = (3.43) rd 0 40 20 Gauss’s Law Φ = I −−→ − → 1 E · S = 0 Z (3.44) Gauss’s law combined with symmetry was shown to be a simple method for calculating electric fields for those systems having a symmetry. In particular, spherical, cylindrical and planar symmetry were considered. Once the electric field has been computed, then it is possible to predict the motion of charged particles in this field using Newton’s laws of motion. The motion of an electron in an electric field was discussed. Reading assignment: Giancoli, Chapter 22 25